
热门标签
热门文章
- 1视频插针调研
- 2深度学习之梯度_深度学习 梯度
- 3Linux patch命令教程:如何在Linux中应用和创建补丁(附实例详解和注意事项)
- 4除了迅雷,这几款下载神器也超级好用!_下载工具
- 5Cannot change version of project facet Dynamic Web Module to 3.0 问题错误_descriptionresourcepathlocationtype cannot change
- 6使用Axios来设置请求头(headers)的方法_axios header
- 7【YOLO小项目】YOLOv5目标检测 pyqt5 GUI_pyqt5 yolo视频识别
- 8CSDN社区编程语言信息抓取与统计
- 9FastAPI Web框架教程 第2章 Path和Query
- 10信息网络终端维修员中级工理论知识测试题--选择题_频段越高传播过程中功率损耗也越大覆盖能力越差,为了提升覆盖能力高频ssb波束通常
当前位置: article > 正文
[论文笔记] CLRerNet: Improving Confidence of Lane Detection with LaneIoU
作者:凡人多烦事01 | 2024-04-22 11:09:02
赞
踩
clrernet: improving confidence of lane detection with laneiou
Honda, Hiroto, and Yusuke Uchida. “CLRerNet: Improving Confidence of Lane Detection with LaneIoU.” arXiv preprint arXiv:2305.08366 (2023).
2023.05 出的一篇车道线检测的文章, 效果在CULane, CurveLanes SOTA
简介
这篇论文在CLRNet基础上, 使用提出的LaneIoU代替CLRNet论文中LineIoU, 在两个数据集上取得了SOTA效果
LaneIoU
论文其他部分可以不看, 直接调到3.2 LaneIoU即可;
LineIoU存在问题
从下面图片及公式(CLRNet)可发现, 当车道线越水平时, 通过该公式计算出来的IoU越大, 比如从两侧出发的车道线, 预测线和GT离得很近, 但是使用该LineIoU计算得到较大的值, 导致在分配正负样本和计算loss时候均带来副作用, 导致模型效果不佳;
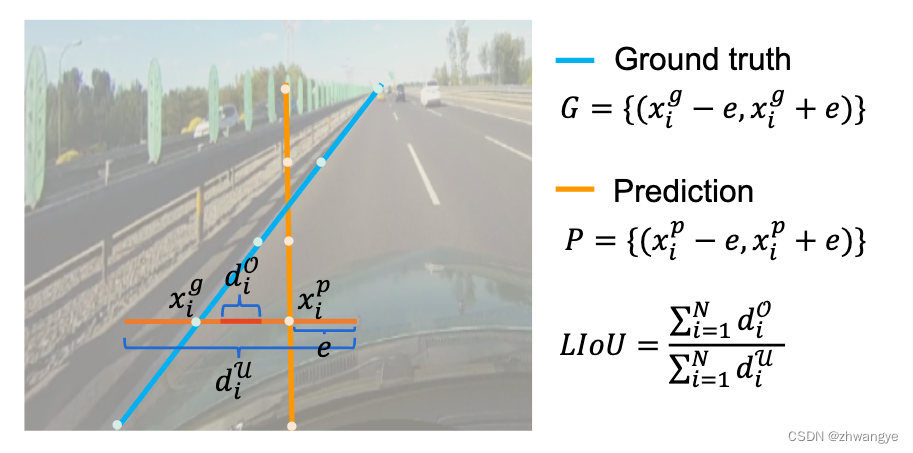
注意: 这里的e是一个常数, CLRNet中取得为15

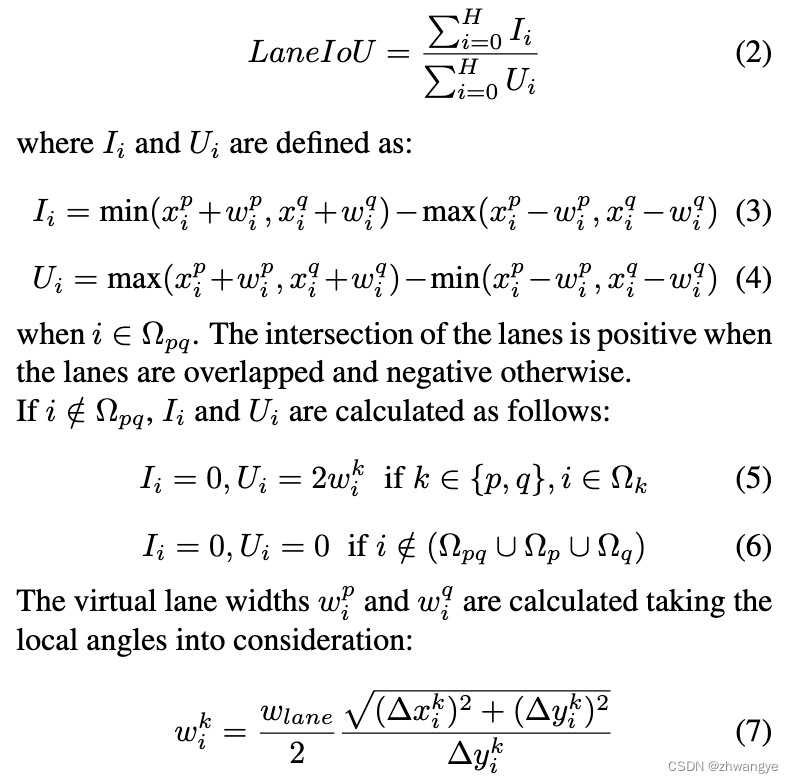
为什么使用LaneIoU
为了解决LineIoU存在的问题, 如上,
从下图可发现, 公式3,4 和 CLRNet公式4 很相似, 仅仅把 e e e换成了 w w w, 从一个固定值变成动态计算, 主要计算由公式7给出,
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/凡人多烦事01/article/detail/468395
推荐阅读
相关标签

