
- 1【Python制作词云】改变词云字体颜色_python词云图字体颜色
- 2在vue和小程序中使用腾讯实时音视频RTC(小程序端)_腾讯实时音视频 vue和小程序不在同一个环境
- 3RS编码与解码的理论原理及误码率性能分析
- 4【部署LLaMa到自己的Linux服务器】_llama部署
- 5Python连接SQL SEVER数据库全流程_python连接sql server
- 6手把手教你如何使用ESP8266(ESP-01S)连接到阿里云物联网平台,并通过微信小程序控制设备(如灯的亮、灭、数据上报到微信中显示)_esp8266连物联网
- 7处理Bug:嵌套RecyclerView加载数据后页面自动滑动问题_recyclerview 自己滑动
- 8大数据分析django基于python的影片数据爬取与数据分析的论文_基于python的电影数据分析论文
- 9评论观点抽取
- 102024蓝桥杯省赛C++软件算法研究生组题解(含代码)+游记_蓝桥杯2024年答案c++
从零开始速通一台多方式控制的STM32自平衡小车【2蓝牙通信篇】_自平衡小车如何加入蓝牙功能
赞
踩
前言
这个学期有个嵌入式课程设计的任务,要求用战舰V3开发板整点活出来。毫无嵌入式底子但是想搞点花头的我思来想去,最终决定搞一台多方式控制的STM32自平衡小车。
整个设计可以简单的分为遥控器部分和小车部分。遥控器用的是正点原子的STM32F1战舰V3开发板;小车底盘、主控板用的是大鱼电子家的。目前已经实现:
用战舰V3的按键控制;
游戏手柄连接战舰V3控制;
MPU6050连接战舰V3实现体感控制;
键盘控制(电脑蓝牙连接小车然后键盘控制小车运动)。
演示视频链接:【疯狂试验】超越想象!我用STM32打造的自平衡小车竟然能飞!?_哔哩哔哩_bilibili
蓝牙通信篇
如何实现远程控制小车呢?其中一项较为简单的实现方式就是蓝牙。在控制器端串口连接主机蓝牙,在小车端串口连接从机蓝牙。在控制器端,将控制指令信息通过串口发送给主机蓝牙模块,主机蓝牙通过蓝牙通信协议将信息传输到从机蓝牙,小车端通过串口中断获取从机蓝牙接受的数据,进而控制小车。
主从蓝牙配对
首先我们需要一个能当主机的蓝牙和一个能当从机的蓝牙。注意:两个只能当从机的蓝牙不能进行配对!所以购买蓝牙模块时请注意其中一个蓝牙是否能当主机蓝牙。我用的主机蓝牙是HC05,从机蓝牙是BT06,两个加起来花我了¥24。
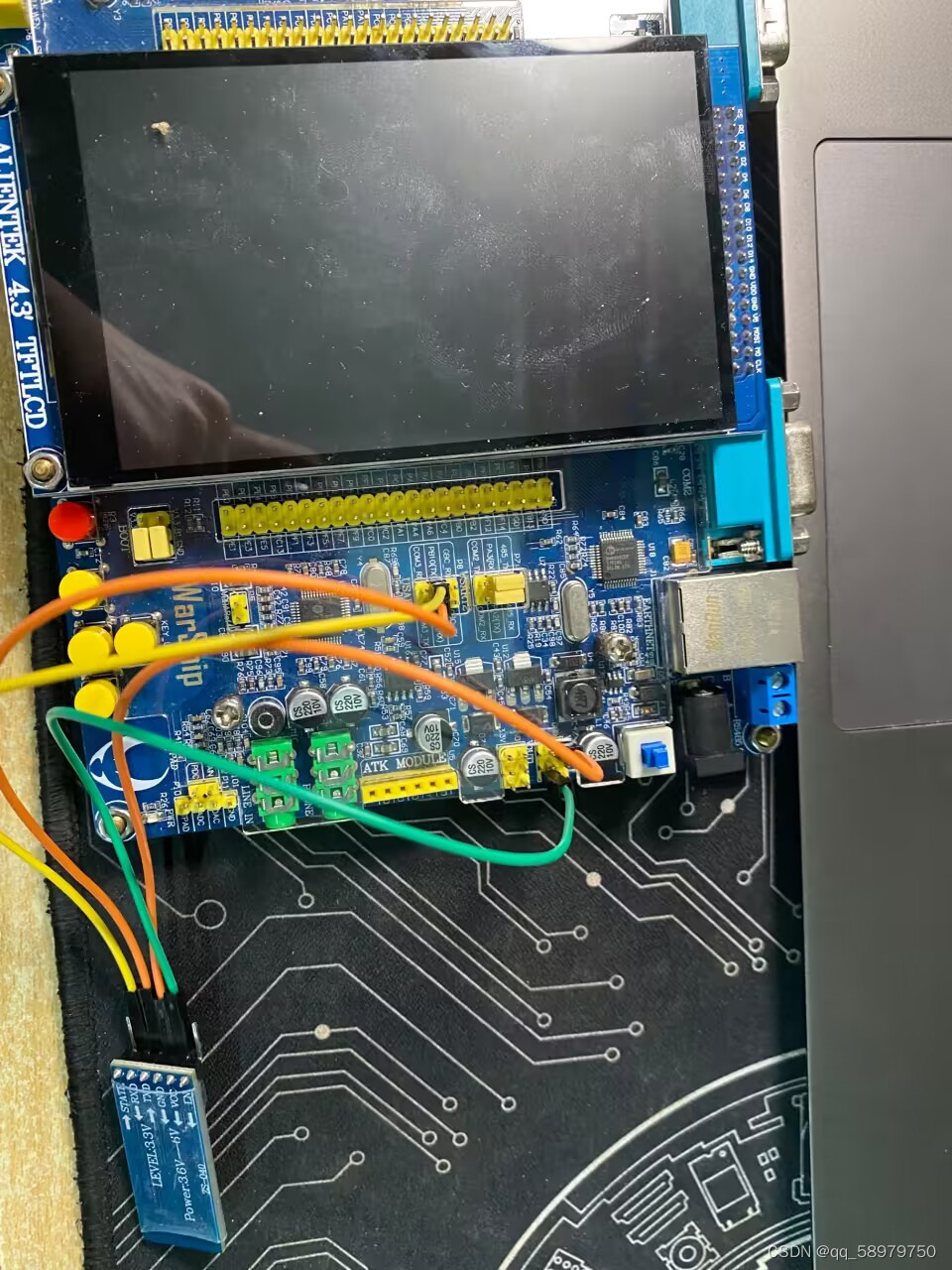
主从蓝牙配对需要更改蓝牙的初始化信息。修改可以采用串口调试工具例如XCOM进行可视化更改。当然更改前需要将蓝牙与电脑相连。一般是蓝牙接TTL转USB接口工具,接口工具USB口接电脑。蓝牙有4引脚或6引脚的,但是只需要用到其中4个引脚:VCC接5V,GND接地,RXD接TXD,TXD接RXD。

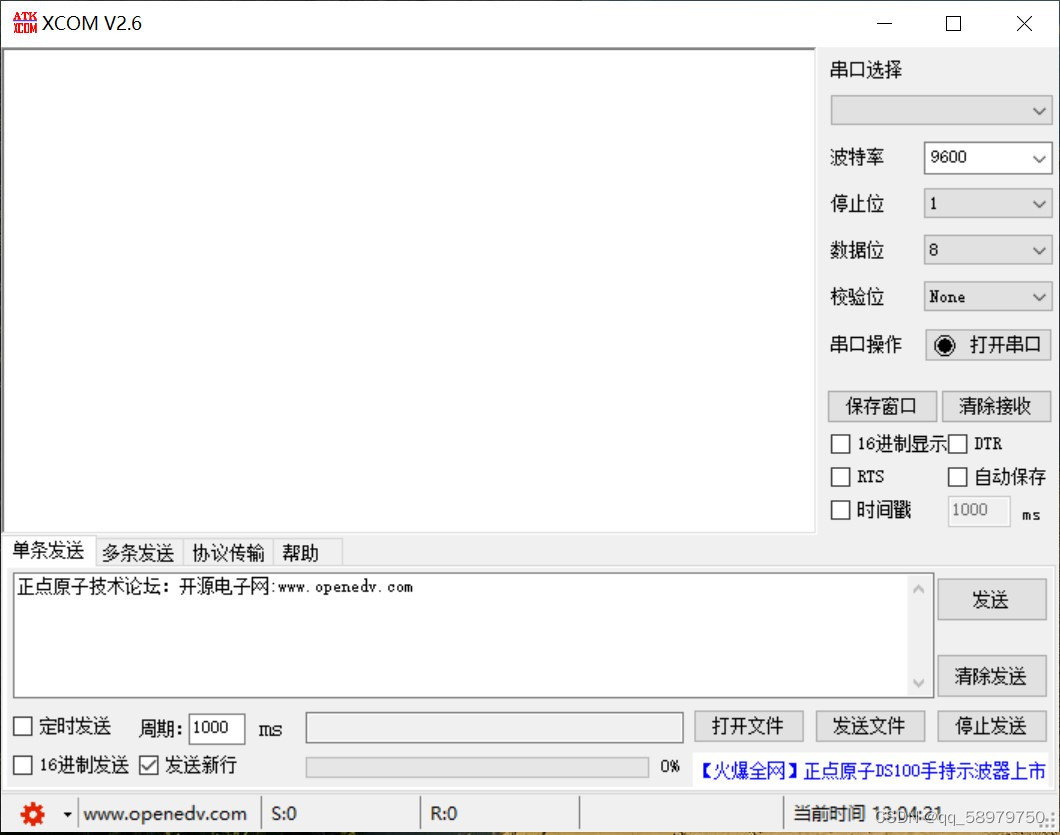
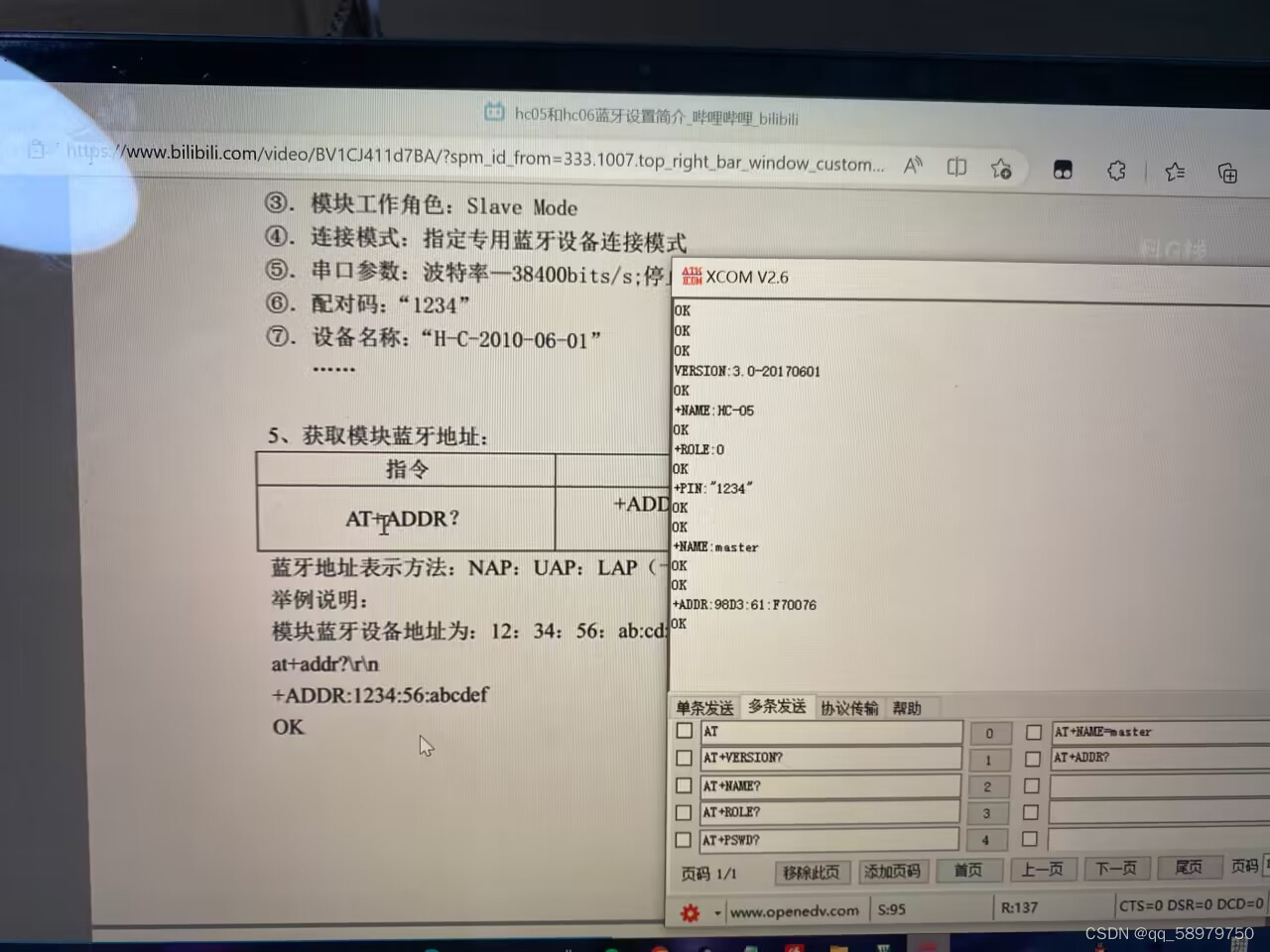
连接好打开XCOM是如下界面,当你正确连接蓝牙、TTL转USB接口工具和电脑时,串口选择处会有跳出串口信息,点击打开串口,切换到多条发送,发送AT指令来修改蓝牙信息。注意:不同型号的蓝牙AT指令集不同(一般是一个文档),具体请参考你所采用的蓝牙型号。
HC05有点特殊,进入设置模式需要按住模块的小按键再插电,看到红灯闪烁慢,那么说明工作进入设置模式。
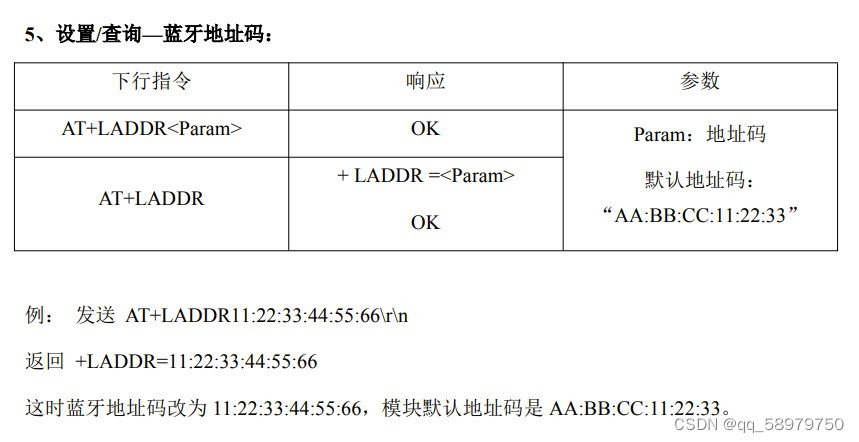
我们需要修改的AT信息可以参考这位佬的博客,他写的很详细。蓝牙的ROLE、PSWD、MODE、BIND等参数需要修改:(2条消息) HC05蓝牙主机配对BT06蓝牙从机教程_bt06蓝牙程序流程图_Diss_chan的博客-CSDN博客
当主从蓝牙配置好后,可以给蓝牙通电连接。先启动从机蓝牙BT06再启动HC05,指示灯闪烁一致时即表示成功。
主机蓝牙与战舰V3开发板的连接和代码
连接示意图如下。RXD接PB10(TX),TXD接PB9(RX),VCC接5v,GND接地。当然可以选择连接到其他引脚。
以下是usart2.c代码。
- #include "delay.h"
- #include "usart2.h"
- #include "stdarg.h"
- #include "stdio.h"
- #include "string.h"
- #include "timer.h"
- //
- //本程序只供学习使用,未经作者许可,不得用于其它任何用途
- //ALIENTEK STM32开发板
- //串口3驱动代码
- //正点原子@ALIENTEK
- //技术论坛:www.openedv.com
- //修改日期:2015/3/29
- //版本:V1.0
- //版权所有,盗版必究。
- //Copyright(C) 广州市星翼电子科技有限公司 2009-2019
- //All rights reserved
- //
-
- //串口接收缓存区
- u8 USART2_RX_BUF[USART2_MAX_RECV_LEN]; //接收缓冲,最大USART2_MAX_RECV_LEN个字节.
- u8 USART2_TX_BUF[USART2_MAX_SEND_LEN]; //发送缓冲,最大USART2_MAX_SEND_LEN字节
-
- //通过判断接收连续2个字符之间的时间差不大于10ms来决定是不是一次连续的数据.
- //如果2个字符接收间隔超过10ms,则认为不是1次连续数据.也就是超过10ms没有接收到
- //任何数据,则表示此次接收完毕.
- //接收到的数据状态
- //[15]:0,没有接收到数据;1,接收到了一批数据.
- //[14:0]:接收到的数据长度
- vu16 USART2_RX_STA=0;
-
-
- void USART2_IRQHandler(void)
- {
- u8 res;
- if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)//接收到数据
- {
- res =USART_ReceiveData(USART2);
- if((USART2_RX_STA&(1<<15))==0)//接收完的一批数据,还没有被处理,则不再接收其他数据
- {
- if(USART2_RX_STA<USART2_MAX_RECV_LEN) //还可以接收数据
- {
- TIM_SetCounter(TIM7,0);//计数器清空 //计数器清空
- if(USART2_RX_STA==0) //使能定时器7的中断
- {
- TIM_Cmd(TIM7,ENABLE);//使能定时器7
- }
- USART2_RX_BUF[USART2_RX_STA++]=res; //记录接收到的值
- }else
- {
- USART2_RX_STA|=1<<15; //强制标记接收完成
- }
- }
- }
- }
-
-
- //初始化IO 串口2
- //pclk1:PCLK1时钟频率(Mhz)
- //bound:波特率
- void USART2_init(u32 bound)
- {
-
- NVIC_InitTypeDef NVIC_InitStructure;
- GPIO_InitTypeDef GPIO_InitStructure;
- USART_InitTypeDef USART_InitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE); //串口2时钟使能
-
- USART_DeInit(USART2); //复位串口2
- //USART2_TX PA2
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PB10
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA2
-
- //USART2_RX PA3
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
- GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA3
-
- USART_InitStructure.USART_BaudRate = bound;//波特率一般设置为9600;
- USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
- USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
- USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
- USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
-
- USART_Init(USART2, &USART_InitStructure); //初始化串口 3
-
-
- USART_Cmd(USART2, ENABLE); //使能串口
-
- //使能接收中断
- USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启中断
-
- //设置中断优先级
- NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
- NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
-
-
- TIM7_Int_Init(99,7199); //10ms中断
- USART2_RX_STA=0; //清零
- TIM_Cmd(TIM7,DISABLE); //关闭定时器7
-
- }
-
- //串口2,printf 函数
- //确保一次发送数据不超过USART2_MAX_SEND_LEN字节
- void u2_printf(char* fmt,...)
- {
- u16 i,j;
- va_list ap;
- va_start(ap,fmt);
- vsprintf((char*)USART2_TX_BUF,fmt,ap);
- va_end(ap);
- i=strlen((const char*)USART2_TX_BUF); //此次发送数据的长度
- for(j=0;j<i;j++) //循环发送数据
- {
- while(USART_GetFlagStatus(USART2,USART_FLAG_TC)==RESET); //循环发送,直到发送完毕
- USART_SendData(USART2,USART2_TX_BUF[j]);
- }
- }

以下是usart2.h代码。
- #ifndef __USART2_H
- #define __USART2_H
- #include "sys.h"
-
- #define USART2_MAX_RECV_LEN 600 //�����ջ����ֽ���
- #define USART2_MAX_SEND_LEN 600 //����ͻ����ֽ���
- #define USART2_RX_EN 1 //0,������;1,����.
-
- extern u8 USART2_RX_BUF[USART2_MAX_RECV_LEN];
- extern u8 USART2_TX_BUF[USART2_MAX_SEND_LEN];
- extern vu16 USART2_RX_STA;
-
- void usart2_init(u32 bound);
- void u2_printf(char* fmt,...);
- #endif
main.c的代码根据需求创作了,我就简单贴一份按键&游戏手柄控制的main代码作为参考。
- #include "led.h"
- #include "delay.h"
- #include "key.h"
- #include "sys.h"
- #include "lcd.h"
- #include "usart.h"
- #include "usart2.h"
- #include "string.h"
- #include "key.h"
- #include "joypad.h"
-
- const u8*JOYPAD_SYMBOL_TBL[8]=
- {"Right","Left","Down","Up","Start","Select","B","A"};
- const char JOYPAD_KEY[8]={'C','G','E','A','Z','Z','F','D'};
-
- int main(void)
- {
- u8 t;
- u8 i=0;
- u8 key;
- u8 temp; //i-4
- u8 padKey; //joypad key
- u8 sendmask=0;
- u8 sendcnt=0;
- u8 sendbuf[20];
- u8 reclen=0;
- //char d='A';
- int te=0;
- delay_init(); //延时函数初始化
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
- uart_init(115200); //串口初始化为9600
- USART2_init(9600);
- LED_Init(); //初始化与LED连接的硬件接口
- KEY_Init(); //初始化按键
- LCD_Init(); //初始化LCD
- JOYPAD_Init();
- //usmart_dev.init(72); //初始化USMART
-
- POINT_COLOR=RED;
- LCD_ShowString(30,30,200,16,16,"ALIENTEK STM32F1 ^_^");
- LCD_ShowString(30,50,200,16,16,"HC05 BLUETOOTH COM TEST");
- LCD_ShowString(30,70,200,16,16,"ATOM@ALIENTEK");
- delay_ms(1000); //等待蓝牙模块上电稳定
-
- while(1)
- {
- if(t==0){
- sprintf((char*)sendbuf,"A/0");
- u2_printf("A/0"); //发送到蓝牙模块
- t=1;
- }
-
-
- //sprintf((char*)sendbuf,"%c",d);
- //u2_printf("%c",d); //发送到蓝牙模?
-
-
- //joypad
- padKey = JOYPAD_Read();
- if(padKey)
- {
- LCD_ShowNum(116,130,padKey,3,16);
- for(i=0;i<8;i++)
- {
- if(padKey&(0X80>>i))
- {
- LCD_Fill(30+50,150,30+56+48,150+16,WHITE);
- LCD_ShowString(30+56,150,200,16,16,(u8*)JOYPAD_SYMBOL_TBL[i]);//????
- //transfer to hc05
-
- temp = JOYPAD_KEY[i];
- sprintf((char*)sendbuf,"%c",temp);
- u2_printf("%c",temp); //发送到蓝牙模块
- LED0=!LED0;
- }
- }
- }
- delay_ms(10);
-
-
- //hc05
- key=KEY_Scan(0);
- if(key==KEY1_PRES) //切换模块主从设置
- {
- sendmask=!sendmask; //发送/停止发送
- if(sendmask==0)LCD_Fill(30+40,160,240,160+16,WHITE);//清除显示
- sendcnt ='Z';
- }else if(key==KEY0_PRES)
- {
- sendmask=!sendmask; //发送/停止发送
- if(sendmask==0)LCD_Fill(30+40,160,240,160+16,WHITE);//清除显示
- sendcnt = 'C';
- }else if(key==KEY2_PRES)
- {
- sendmask=!sendmask; //发送/停止发送
- if(sendmask==0)LCD_Fill(30+40,160,240,160+16,WHITE);//清除显示
- sendcnt = 'G';
- }
- else if(key==WKUP_PRES)
- {
- sendmask=!sendmask; //发送/停止发送
- if(sendmask==0)LCD_Fill(30+40,160,240,160+16,WHITE);//清除显示
- sendcnt = 'A';
- }
- else delay_ms(10);
-
- if(t==10)
- {
- if(sendmask) //定时发送
- {
- sprintf((char*)sendbuf,"%c",sendcnt);
- LCD_ShowString(30+40,160,200,16,16,sendbuf); //显示发送数据
- u2_printf("%c",sendcnt); //发送到蓝牙模块
- //sendcnt++;
- //if(sendcnt>99)sendcnt=0;
- }
- t=0;
- LED0=!LED0;
- }
-
- if(USART2_RX_STA&0X8000) //接收到一次数据了
- {
- LCD_Fill(30,200,240,320,WHITE); //清除显示
- reclen=USART2_RX_STA&0X7FFF; //得到数据长度
- USART2_RX_BUF[reclen]=0; //加入结束符
- if(reclen==9||reclen==8) //控制DS1检测
- {
- if(strcmp((const char*)USART2_RX_BUF,"+LED1 ON")==0)LED1=0; //打开LED1
- if(strcmp((const char*)USART2_RX_BUF,"+LED1 OFF")==0)LED1=1;//关闭LED1
- }
- LCD_ShowString(30,200,209,119,16,USART2_RX_BUF);//显示接收到的数据
- USART2_RX_STA=0;
- }
- t++;
- }
- }
主从蓝牙发送数据测试
测试思路是先将主机蓝牙连接到控制器即战舰V3上,从机蓝牙通过TTL-SUB接到电脑上,然后再打开XCOM上,待蓝牙连接后查看数据接收情况。当XCOM成功显示传输的数据,基本就成功了。
注意:设置好的主机蓝牙和从机蓝牙上电后会自动匹配!XCOM记得打开串口!接收到的字符和数字信息是不同的,例如A和65!
小车端串口代码
小车端的蓝牙模块连接主控板上的usart2,同样只需要连4条线,VCC接5V、GND、RXD接TX,TXD接RX。中断函数内容在void USART2_IRQHandler(void)中。串口接收到数据会改变标志位,通过这个条件判断从机蓝牙是否接收到主机蓝牙的数据,可以写个if,写接下来的动作。
- #include "usart2.h"
-
- u8 USART2_RX_BUF[USART2_MAX_RECV_LEN]; //????,??USART2_MAX_RECV_LEN???.
- u8 USART2_TX_BUF[USART2_MAX_SEND_LEN]; //????,??USART2_MAX_SEND_LEN??
- vu16 USART2_RX_STA=0;
-
-
- void uart2_init(u32 bound)
- {
- //GPIO端口设置
- GPIO_InitTypeDef GPIO_InitStructure;
- USART_InitTypeDef USART_InitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能UGPIOB时钟
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); //使能USART2时钟
- //USART2_TX
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA2
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
- //USART2_RX
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
- //USART 初始化设置
- USART_InitStructure.USART_BaudRate = bound;//串口波特率
- USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
- USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
- USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
- USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
- USART_Init(USART2, &USART_InitStructure); //初始化串口2
- USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串口接受中断
- USART_Cmd(USART2, ENABLE); //使能串口2
- }
-
- /**************************************************************************
- 函数功能:串口2接收中断
- 入口参数:无
- 返回 值:无
- **************************************************************************/
- u8 Fore,Back,Left,Right;
- void USART2_IRQHandler(void)
- {
- int Uart_Receive;
- if(USART_GetITStatus(USART2,USART_IT_RXNE)!=RESET)//接收中断标志位拉高
- {
- Uart_Receive=USART_ReceiveData(USART2);//保存接收的数据
- BlueData=Uart_Receive;
- BluetoothCMD(Uart_Receive);
-
- }
- }
-
- void BluetoothCMD(int Uart_Receive)
- {
- switch(Uart_Receive)
- {
- case 65://前进
- Fore=1,Back=0,Left=0,Right=0;
- break;
- default://停止
- Fore=0,Back=0,Left=0,Right=0;
- break;
- }
- }
-
- void Uart2SendByte(char byte) //串口发送一个字节
- {
- USART_SendData(USART2, byte); //通过库函数 发送数据
- while( USART_GetFlagStatus(USART2,USART_FLAG_TC)!= SET);
- //等待发送完成。 检测 USART_FLAG_TC 是否置1; //见库函数 P359 介绍
- }
-
- void Uart2SendBuf(char *buf, u16 len)
- {
- u16 i;
- for(i=0; i<len; i++)Uart2SendByte(*buf++);
- }
- void Uart2SendStr(char *str)
- {
- u16 i,len;
- len = strlen(str);
- for(i=0; i<len; i++)Uart2SendByte(*str++);
- }
-


