
热门标签
当前位置: article > 正文
关于从零开始组装无人机(四旋翼无人机)(一)_无人机组装
作者:凡人多烦事01 | 2024-05-23 01:40:00
赞
踩
无人机组装
关于从零开始组装无人机(四旋翼无人机)
使用一个礼拜进行组装加调试完成
1.了解一些专业知识
必备物品:遥控器,接收机,飞控,无刷电机x4(顺时针旋转两个,逆时针旋转两个),螺旋桨x4(正反桨各两个),电调x4,机架,电流计,电池。螺丝若干
遥控器:就是用于遥控和控制。使用美国手遥控器(其实就是左手控制油门和方向,右手控制前后左右)
飞控系统:(简称:飞控)也就是无人机的电脑。用于接受接收机数据计算方向和计算出来各个电机的转数
接收机:接收机和遥控器是需要**对码**的,也就是无人机的天线。这样就能通过遥控器将油门方向等数据传给接收机,然后再输入给**飞控**。
电子调速器:(简称:电调)用于给电机提供电流的。看电机选电调。
电流计:连接电池,可以提供比较稳定的电压,给飞控提供稳定的5v电压
电池:航模电池
2.说明我使用的材料
遥控器使用的是fs-i6s

接受机:fs-ia10b

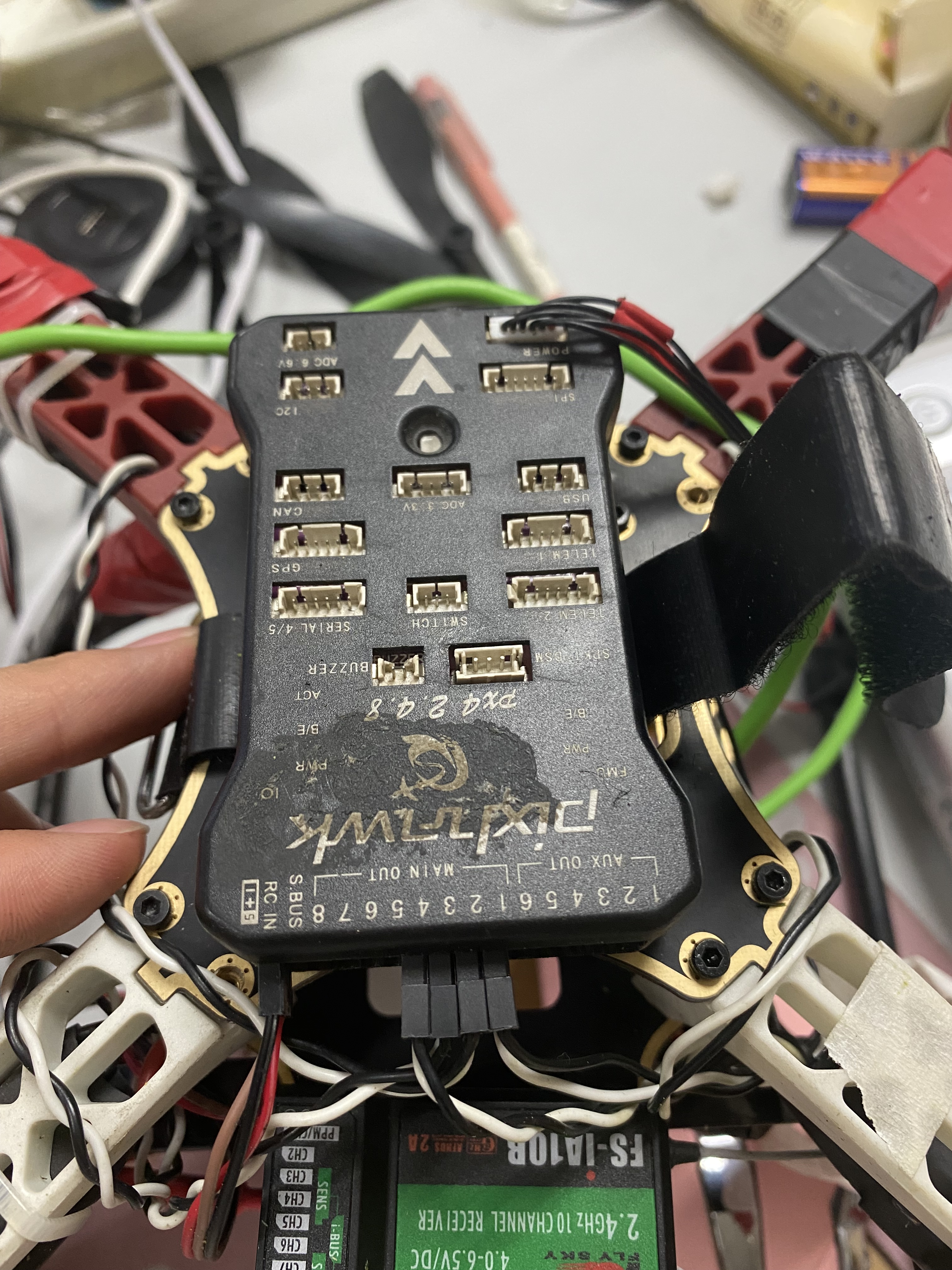
飞控:pixhawk 2.4.8(我这个比较老了)
航模电池:3s 2600mah(11.1v)25c

机架:使用的是450机架

电机:使用的是2206电机,注意看箭头,分顺时针和逆时针

电调:好盈20A电调

(由于我旁边就这些材料,可以根据需求添加GPS,数传,图传等)
3.组装
将电机,电调组装好,调试时
可以去b站参考视频,组装
(注意这只是安装成功,还没调试固件,需要调试好固件调好参数,才能起飞)
踩坑点哈,注意看电机方向,和螺旋桨怎么摆放的
电机方向:右上角为一号电机,逆时针旋转的,这个比较抽象的图


声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/凡人多烦事01/article/detail/610796
推荐阅读
相关标签

