
- 1绘制箱线图 与 异常值的输出 - 基于Python matplotlib库(1)_箱线图的异常值输出
- 2自然语言处理(NLP)—— 神经网络自然语言处理(Neural NLP)基础知识
- 3深入理解机器学习:概念、步骤、分类与实现_列举出两种以上机器学习什么什么过程
- 4一个初级运维工程师对于运维工作的一些浅显认知_设备运维工程师算不算研发岗
- 5数据结构(五)----特殊矩阵的压缩存储_压缩存储结构
- 6粤港澳青少年信息学创新大赛 Python 编程竞赛(初中部分知识点整理)_粤港澳青少年信息大赛初中python题目及答案
- 7深度学习图像处理04:图像分类模型训练实战——动物分类_动物分类数据集
- 8【VirtualBox】--- 从零开始搭建 Ubuntu系统 超详细
- 9MySql个人学习资料_mysql学习资料
- 10AI 大模型 | LLM 大型语言模型 VS 多模态模型_大语言模型和多模态模型
ADAS/AD系统解决方案介绍_adas解决方案
赞
踩
1 自动驾驶分级
按照SAE J1036最新定义的自动驾驶级别,从L0级到L5级定义如下:
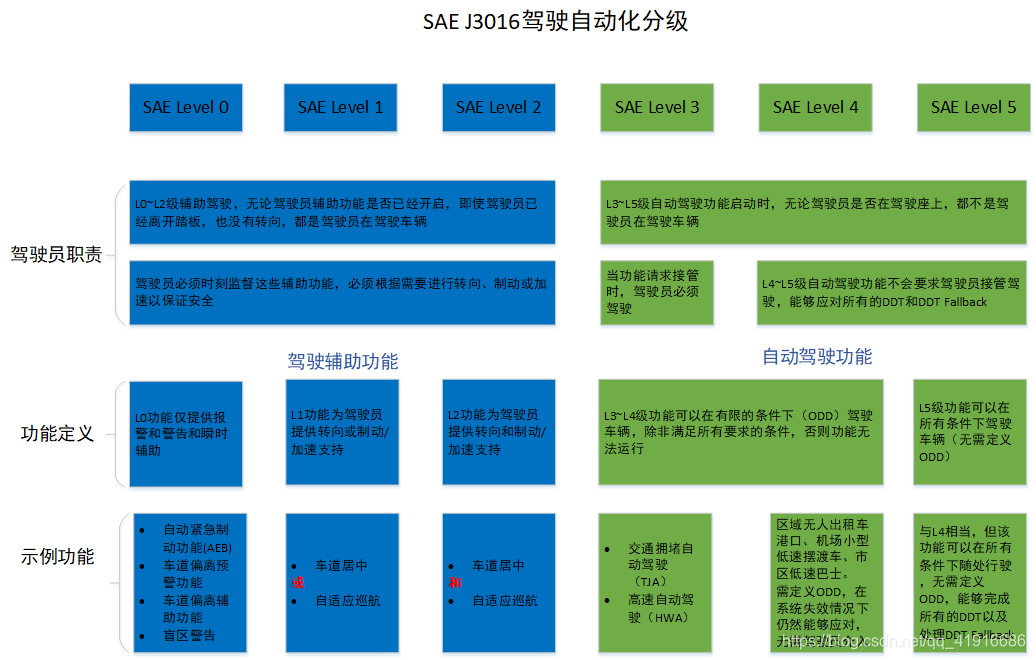
ODD:Operational Design Domain。设计运行域。指自动驾驶系统被设计的起作用的条件及适用范围,如天气环境、道路情况(直路、弯路的半径)、车速、车流量等信息作出测定,以确保系统的能力在安全环境之内。
DDT:Dynamic Driving Task,动态驾驶任务。指汽车在道路上行驶所需的所有实时操作和策略上的功能(决策类行为),不包括行程安排、目的地和途径地的选择等战略上的功能。
DDT Fallback:动态驾驶任务支援。自动驾驶在设计时候,需要考虑系统性的失效(导致系统不工作的故障)发生或者出现超过系统原有的运行设计范围之外的情况,当这两者发生的时候,系统需给出最小化风险的解决路径。
2 ADAS/AD解决方案
针对L0~L5的ADAS/AD系统,目前解决方案如下。
L0~L2为分布式系统架构,主要基于单摄像头或单雷达一体机式实现驾驶辅助功能。
L3~L5为集中式架构,除了外围的传感器,存在域控制器,用于多传感器数据融合,对视觉、毫米波雷达、超声波雷达、激光雷达、高精度地图,高精定位、V2X等数据进行融合处理,并进行决策、规划、控制等算法的实现。

3 分布式架构和集中式架构
**分布式架构(L0~L2):**感知和计算一体式模块,如前视摄像头模块为例(FCS),整个模块将镜头模组、计算平台主板被整合在一起;ECU主板内含2个芯片:安全核(Safety Core)和性能核(Performance Core)的主流芯片组合架构方案,安全核一般为MCU,算力要求不高,功能安全等级较高,实现逻辑运算,主要实现决策控制算法、诊断、通讯等。性能核一般为SOC,算力要求较高,主要实现感知算法
**集中式架构(L2+~L5):**随着自动驾驶等级的增加,自动驾驶实现的功能越发复杂,对感知要求也相应提高,此时需要完成多传感数据融合处理,这时候分布式架构便不能完全满足算力递增对硬件的要求,因此域控制的概念随之而生。比如HWA功能,相比L2级实现的功能,在上下匝道等较为复杂的场景,仅依靠摄像头无法保证感知的可靠性,因此往往需要视觉数据、雷达数据、激光雷达数据、高精地图、高精定位等数据的融合处理,这时候摄像头就是纯传感器,图像感知处理完全在域控制器实现。域控制器的芯片方案一般为:Safety Core(MCU)+ PerformanceCore(SOC)方案+AI AcceleratingCore(GPU/FPGA,if needed)) + other Accelerating Core(if needed) 方案
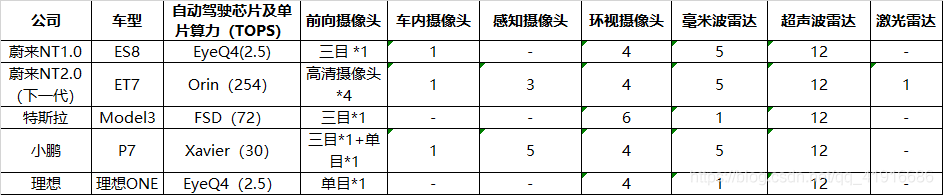
4 目前主流量产方案
4.1 小鹏P7 Xpilot 3.0
小鹏P7自动驾驶主要实现高速巡航和记忆泊车等L3级功能。
感知方面:小鹏P7 X Pilot 3.0配备了13个摄像头(前三目、4颗ADAS摄像头、4颗泊车360环视摄像头、1颗车内人脸识别摄像头、1颗行车记录仪摄像头)+5颗毫米波雷达+12颗超声波雷达+双频高精度GPS,高精度地图定位+V2X技术
计算单元:英伟达DRIVE Xavier自动驾驶计算单元



4.2 蔚来ES8
待更新
4.3 特斯拉Model3
待更新
4.4 方案对比
SAE J3016标准
中信证券研报
其它论坛,博客,研究报告等,若有侵权,联系删除。

