- 1spark[2]: 关于partition的相关操作(帮助理解RDD)_spark partition by
- 2SQL查询语句(全网最详细教学)
- 3Mac运行已安装软件提示“XXX 已损坏,打不开。移到废纸篓/推出磁盘映像。”解决方法_已损坏,无法打开。 你应该推出磁盘映像。
- 4开源AlphaFold3来啦!快来亲自尝试预测蛋白质结构!_alphafold3怎么用
- 5iVX低代码平台系列详解 -- 系统架构_低代码平台技术架构_低代码平台前后端传输对象结构
- 6【无人机】基于PID控制的无人机巡航仿真(Matlab代码实现)_matlab pid无人机仿真
- 7git常用命令(github中的token)(.gitignore)_git token
- 8请使用python生成一段LDA主题模型代码
- 9SOLIDWORKS PDM—数据库的备份_pdm 必须让文件库数据库脱机,然后才能在 solservermanagement studio 中
- 10【Sql Server】随机查询一条表记录,并重重温回顾下自定义函数的封装和使用_sql server 创建函数
变分模态分解(VMD)与其改进算法
赞
踩
之前参加课题组相关信号处理的课题的学习笔记。
变分模态分解(variational mode decomposition)VMD是2014年提出的一种非递归信号处理方法,通过将时间序列数据分解为一系列具有有限带宽的本征模态函数(IMF),迭代搜寻变分模态的最优解。VMD可以自适应更新各IMF的最优中心频率和带宽。
相较于EMD,VMD具有更强大的性能:在进行EMD分解时,我们需要利用信号的极大值和极小值来计算包络,而信号的极值很有可能收到噪声干扰,因此EMD对噪声比较敏感;EMD还存在端点效应的问题,即在信号的端点处由于没有前后帧的信息,求得的包络面可能不准确,在后期分解的过程中,可能会得到不准确的IMF分量。而VMD不存在这方面问题,其具有较好抗噪能力,能解决频率混叠问题。
VMD原理
VMD实际上是将分解过程转化为了优化过程,其过程是变分问题的求解过程,该算法可分为变分问题的构造和求解。
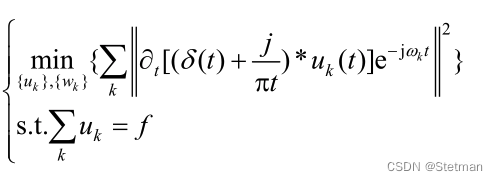
变分问题构造:
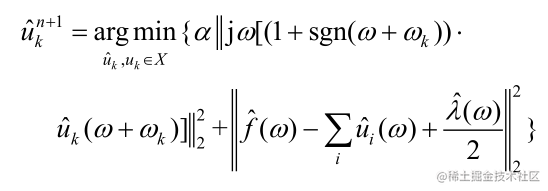
变分问题求解:
引入二次惩罚因子α和拉格朗日乘法算子λ(t),将约束性变分问题变为非约束性变分问题:

采用了乘法算子交替方向法(alternate direction method of multipliers)ADMM 解决以上变分问题,通过交替更新计算,求扩展拉格朗日表达式的‘鞍点’:
总体整合如下:

VMD使用
在python中可以装载vmdpy,从中调用VMD函数:
- from vmdpy import VMD
- u, u_hat, omega = VMD(signal, alpha, tau, K, DC, init, tol)
在 VMD 分解函数中,signal即为转化为一维的待分解信号,
以下为参数,可以调整以获得更好的分解效果:
alpha:这是带宽约束参数。增加 alpha 值会使分解的模态更加平滑,但也可能导致过度平滑和模态混合。减小 alpha 值会使分解的模态更加锐利,但也可能导致噪声增强和虚假模态出现。
tau:这是噪声容忍度参数。增加 tau 值会使算法对噪声更加容忍,从而减少虚假模态的出现。但是,过大的 tau 值也可能导致真实模态被忽略。
K:这是模态数量参数。选择合适的 K 值非常重要,因为它决定了分解结果中包含多少个模态。如果 K 值过小,则可能导致多个真实模态被混合在一起;如果 K 值过大,则可能导致虚假模态的出现。
DC:这是直流分量参数。如果信号中包含直流分量,则应将此参数设置为 1;否则应将其设置为 0。
init:这是初始频率估计方法参数。可以选择均匀初始化(init=1)或随机初始化(init=2)。
tol: 这是收敛容差参数。减小此值可以使算法收敛到更精确的结果,但也会增加计算时间。
调整这些参数需要根据具体信号特点和分析需求进行试验和比较
返回值中:
u: 分解后的模态信号,二维 numpy 数组,每行为一个模态信号。
u_hat: 不同模态的频谱
omega: 模态中心频率随时间变化的轨迹,二维 numpy 数组,每行为一个模态中心频率轨迹。
可以进一步封装此函数,写一个简单的脚本:
- from typing import Tuple
- import numpy as np
- from vmdpy import VMD
-
-
- def vmd_decomposition(signal: np.ndarray, K: int) -> Tuple[np.ndarray, np.ndarray]:
- # 设置 VMD 参数
- alpha = 2000 # moderate bandwidth constraint
- tau = 0. # noise-tolerance (no strict fidelity enforcement)
- DC = 0 # no DC part imposed
- init = 1 # initialize omegas uniformly
- tol = 1e-7 # convergence tolerance
-
- # 进行 VMD 分解
- u, u_hat, omega = VMD(signal, alpha, tau, K, DC, init, tol)
-
- return u, omega

如果要依据VMD进行重构,即为将每个预测的IMF信号直接进行叠加。
改进VMD算法
在之前阅读的论文中,有两篇使用了改进VMD:
DetectDUI: An In-Car Detection System for Drink Driving and BACs
作者认为VMD虽然通过非递归解决了EMD易被噪音干扰的问题,然而,分解模式的数量影响每个模式的中心频率和窄带宽,导致呼吸和心跳的检测精度降低。因此,作者提出了自适应变分模态分解,来自适应地确定分解模式的数量:
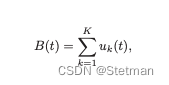
首先,AVMD将时间序列信号B(t)分解为K个子信号,(模式)通过固有模式函数(IMF),其中uk(t)是第k个模式
与传统的VMD算法类似,AVMD需要三个步骤来估计每个IMF的带宽。首先,计算每个模式的分析信号。然后,将这些模式与指数相混合,以将它们的频率转移到基带。最后,通过梯度的平方L2范数来估计每个模式的带宽。约束变分问题可以表示为 :
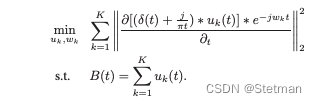
= -1 ,wk是模式uk(t)的中心频率。
整体算法如下:
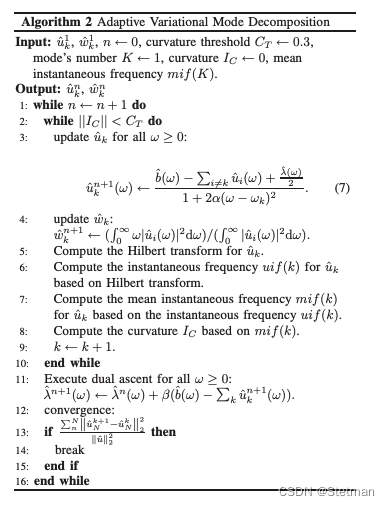
第3行和第4行更新模式及其中心频率。在方程(7)中,ξb(ω)是滤波信号的频域表示。λ是二次罚项[34]。α是白噪声的方差。在第5行中计算uõk的希尔伯特变换,在此基础上,在第6行中计算瞬时频率uif(k),在第7行中计算平均瞬时频率mif(k)。根据第8行中的mif(k)导出曲率IC。处罚期限,λ在第11行中基于更新率β进行更新,收敛条件在第12行中给出。
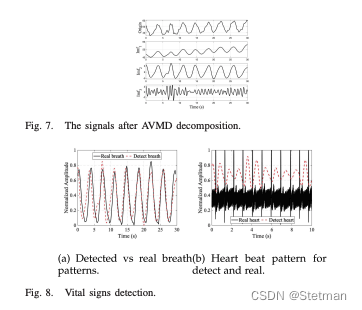
文章给出的效果展示:
V2 iFi: in-Vehicle Vital Sign Monitoring via Compact RF Sensing
作者基于前人的工作,认为摄像机会侵犯个人隐私、声信号对宠物与婴儿不友好且易于被背景影响、wifi信号在狭小多人环境下很难提取出每个人的信号,因此选取了RF射频信号作为监控驾驶疲劳的信号。
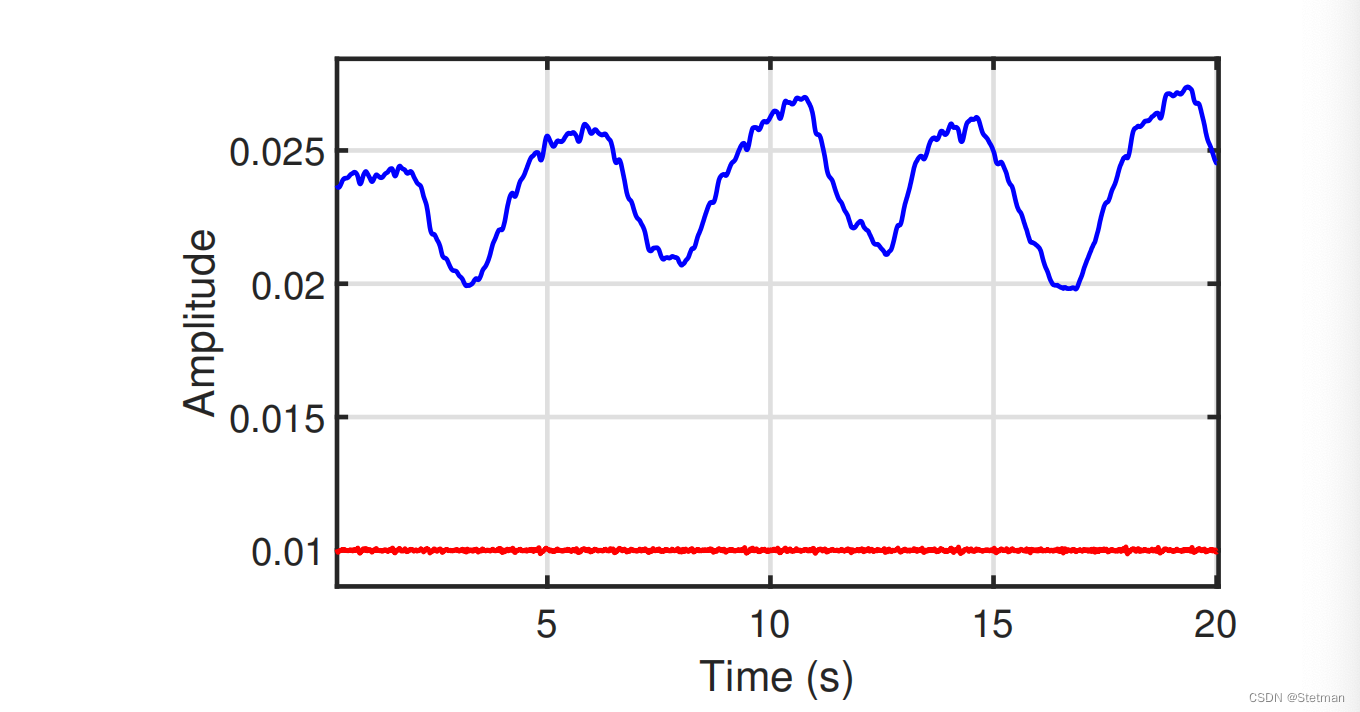
文中,在通过峰值等方法实现了不同乘车人信号的区分后,即面临对于信号分离方面的问题。文中认为此时信号为驾驶员心跳、呼吸、车辆震动、驾驶员动作的混合信号,对于这种情况的信号分离工作,VMD再合适不过。然而,VMD只支持单一信号序列,而单一信号不足以提取生命体征。因此,作者改进该算法,提出了一种多序列VMD算法:MS-VMD算法(如下图)。
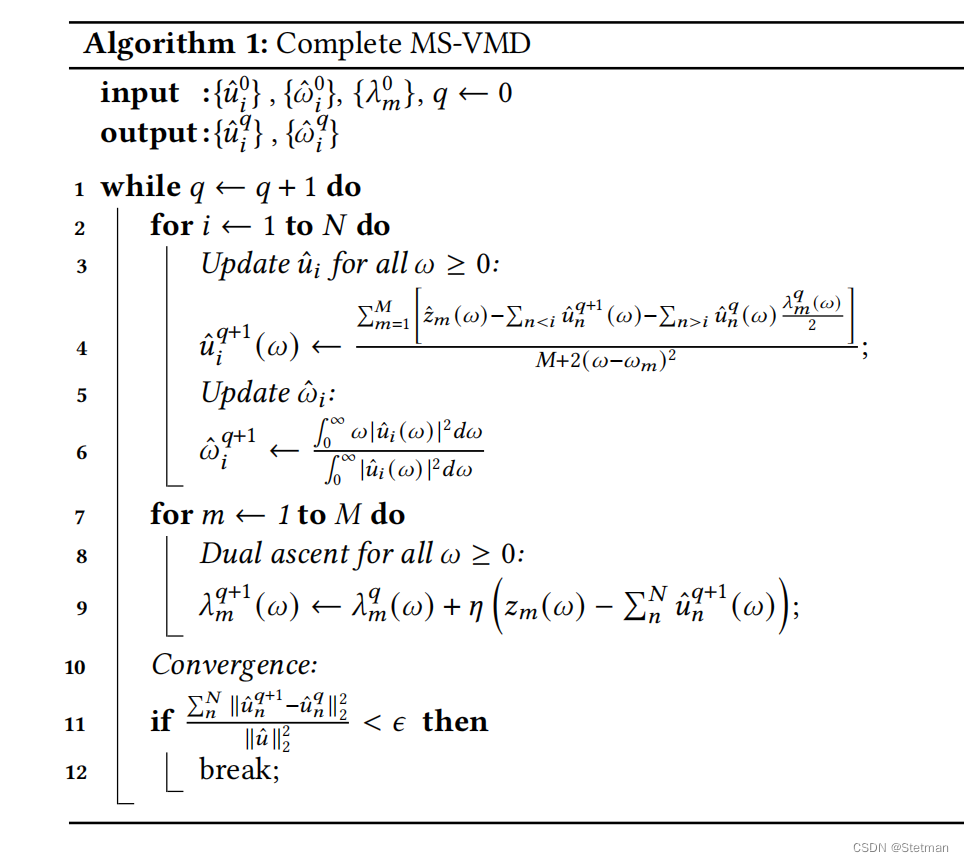
分解效果:蓝线即为所求