
- 1如何批量导出 PowerPoint 中的备注到一个txt文本中【最简单最强版】_ppt的备注如何一次性导出来
- 2自建SSL证书(兼容ios)_苹果浏览器自定义ssl
- 3【VPN技术】简述几种常见VPN技术并比较其异同点_l2tp和ipsec哪个好
- 4python运行的本地环境搭建的几种方法_如何本地使用python运行
- 5java 上传文件/图片 到linux服务器_java项目中图片保存到linux服务器里实现方式
- 6Redis在Linux下的使用命令_linux中redis 命令使用
- 7SQLSERVER 使用Windows 身份验证 模式登录 显示登陆失败_sqlserverwindows身份验证登录不上
- 8UnityVR UI被3D物体遮挡_unity 3dui 遮挡
- 9神经网络应用场景——自然语言处理_神经网络的应用场景
- 10neo4j ,neo4j-desktop国内下载镜像_neo4j的4.3.5版本镜像下载
[自动驾驶 SoC]-4 特斯拉FSD
赞
踩
FSD, 参考资料来源FSD Chip - Tesla - WikiChip
另外可参考笔者之前分享文章:[自动驾驶技术]-6 Tesla自动驾驶方案之硬件(AI Day 2021),[自动驾驶技术]-8 Tesla自动驾驶方案之硬件(AI Day 2022)
1 整体介绍
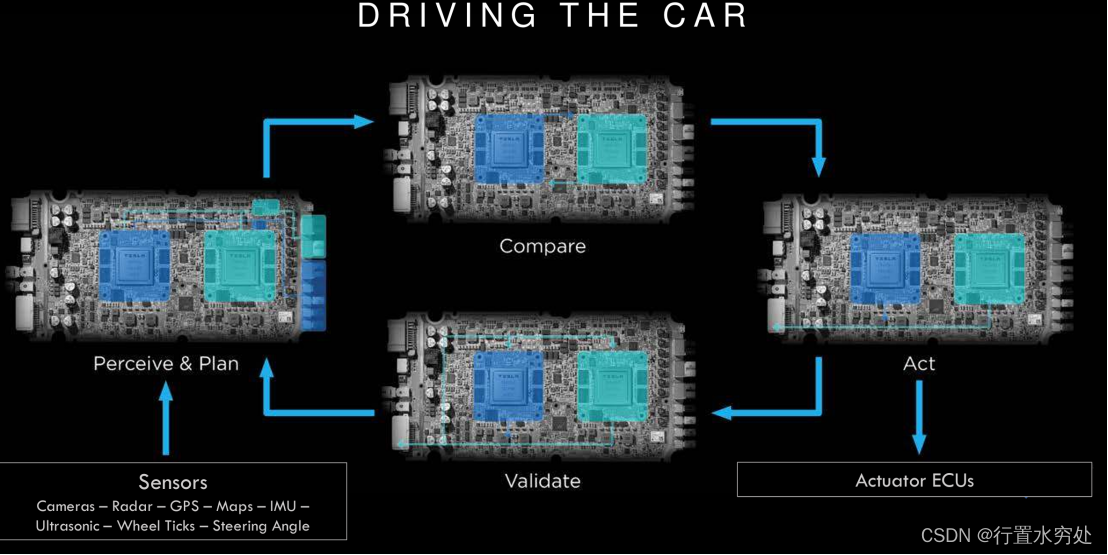 特斯拉FSD计算机架构:
特斯拉FSD计算机架构:
- 双冗余SoC,冗余电源:每个SoC拥有独立的电源和操作系统,确保高可靠性。
- 传感器输入:包括IMU、雷达、GPS、超声波传感器、轮速计、转向角和地图数据。
- 8个外部摄像头和12个超声波传感器:同时将数据输入两个FSD芯片。
- 独立处理:两个芯片独立生成车辆未来行动计划,并交由安全系统进行比较和验证。
2 FSD芯片规格

特斯拉D1芯片由1个GPU,2个NPU,3簇12个ARM Cortex-A72 CPU核,安全核,视频编码器等模块组成。
- 制程工艺:14nm FinFET CMOS,12层金属
- 面积:260 mm²
- 晶体管数量:60亿
- 包装:37.5 x 37.5 mm FCBGA
- 处理器:12个Cortex-A72核心,2.2GHz
- 神经网络性能:36.86*2 TOPS
- 功耗:每芯片低于40W
3 芯片核心组件
- GPU:用于图像处理
- CPU:12核ARM Cortex-A72
- ISP(图像信号处理器)
- H.265视频编码器
- 内存控制器、PHYs、片上互连和外围设备
3.1) 神经网络加速器(NNA)
- 两个独立实例双神经处理单元(NPU):每个NPU拥有32MB的SRAM,用于存储临时网络结果,减少数据移动。
- 设计频率:使用8位乘法和32位加法,2GHz+。
- 多路累加器阵列:每个NPU有96x96的乘加阵列,总共9,216个MACs和18,432个操作。
- 硬件SIMD、ReLU和Pooling单元(参见3.2和3.3)。
- 每个实例32MB SRAM,优化带宽;操作流程在每个周期中,数据从SRAM读入MAC阵列进行计算,结果数据写回SRAM。
- 激活函数支持包括ReLU、Sigmoid Linear Unit (SiLU)、TanH。
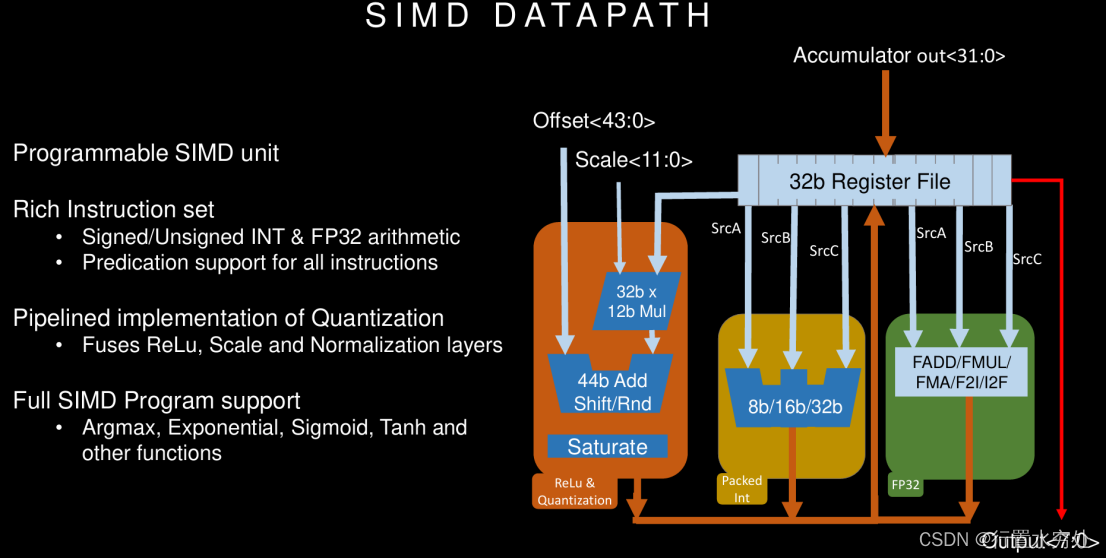
3.2) SIMD数据路径
- 可编程SIMD单元,支持丰富的指令集
- 浮点与整数运算
- 支持所有指令的谓词化
- 量化硬件的流水线实现,融合ReLu、缩放和归一化层
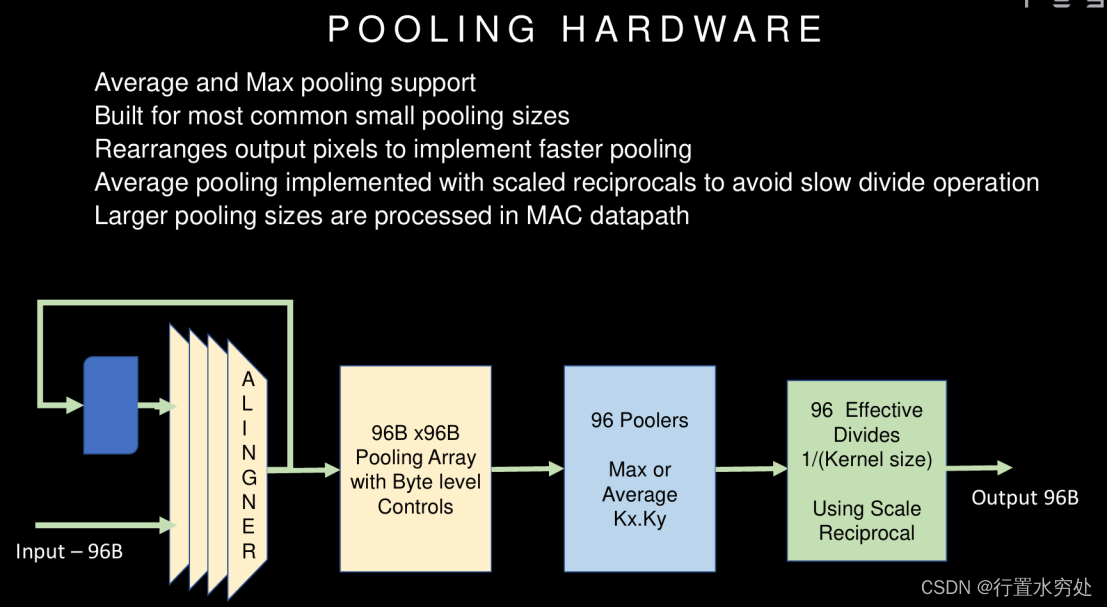
3.3) 池化硬件
- 支持平均和最大池化
- 为最常见的小池化尺寸优化
- 重新排列输出像素以实现更快的池化
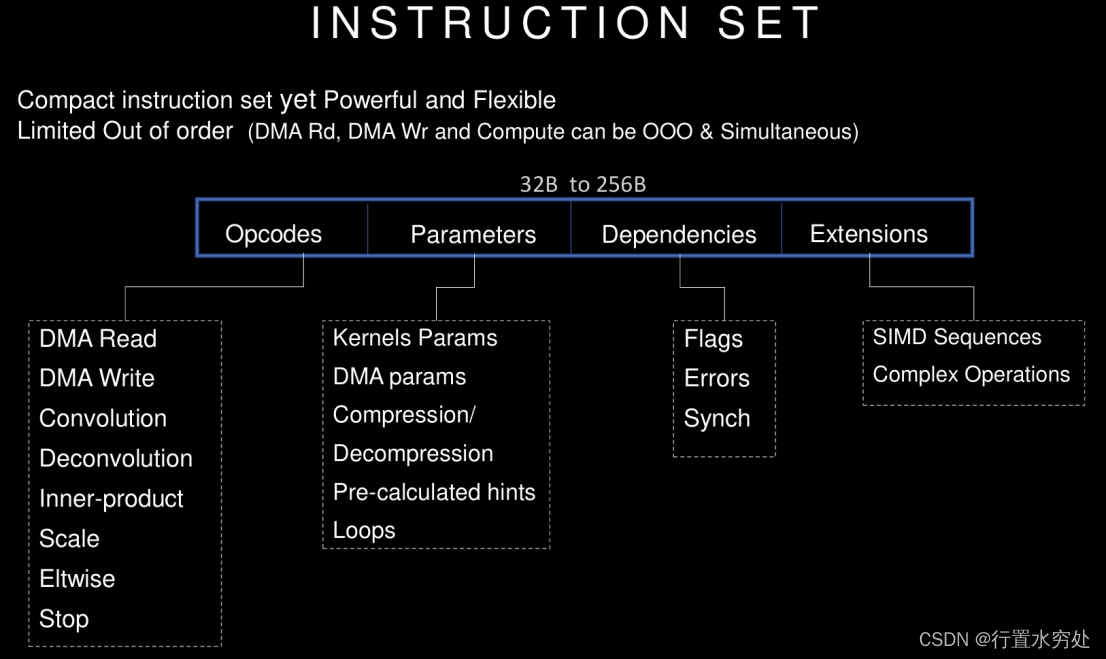
3.4)指令集和微架构:
- 简化硬件设计:一些硬件被简化,增加了软件复杂性,但降低了硅片成本。
- 软件优化:特斯拉的神经网络编译器负责层融合、内存访问平滑、通道填充和DMA操作。
- 运行模式:神经网络程序在芯片启动时加载并驻留内存,NPU在异步运行整个神经网络模型后中断CPU进行后处理。

4 特斯拉自研优势
- 优化性能:通过自研SoC,特斯拉可以针对特定的自动驾驶任务进行深度优化,提高处理效率和系统响应速度。
- 降低成本:自研芯片可以减少对第三方供应商的依赖,从而降低长远的成本。
- 增强控制:特斯拉可以完全掌控芯片的设计和生产过程,确保产品的质量和安全性,同时能够快速进行更新和改进。
- 知识产权:自研芯片可以保护特斯拉的技术和算法不被竞争对手轻易复制。
5 特斯拉NNA设计哲学
专注加速MAC操作:由于99.7%的操作是乘加(MAC),加速MAC能显著提升性能。
硬件专用量化和池化单元:提高整体速度和效率。
灵活的SIMD单元:支持丰富的指令集,包括整数和浮点运算。
灵活的状态机控制逻辑:减少控制功耗,支持复杂操作。
数据共享和最小化数据移动:减少SRAM和DRAM活动,进一步降低功耗。
单时钟域设计:支持DVFS(动态电压频率调整)以优化功耗和时钟分布。

