
- 1毕设分享 基于ZigBee的智能灯控系统_基于zigbee的无线智能灯控
- 2vue3使用monaco-editor组件_vue3 monaco-editor
- 3基于hadoop的商品推荐系统_书籍商品推荐系统
- 4Canny 边缘检测算法-python实现_canny边缘检测算法python30行
- 5Pytorch 模型训练步骤_pytorch训练函数
- 6uniapp小程序使用自定义tabbar_uniapp小程序自定义tabbar
- 7A-Star(A*)算法_a星估值函数
- 8超详细的VSCode下载和安装教程(非常详细)从零基础入门到精通,看完这一篇就够了。
- 9Apache AGE 聚合函数
- 10深入super,看Python如何解决钻石继承难题
麦轮的解算(第一部分)_麦轮运动解算
赞
踩
目录
前言
这篇文章是我在学习单片机控制麦轮运动时写的,因为看了很多文章但是总感觉还是自己总结一下比较好,所以就有了这篇博客。
一、麦轮的基本安装
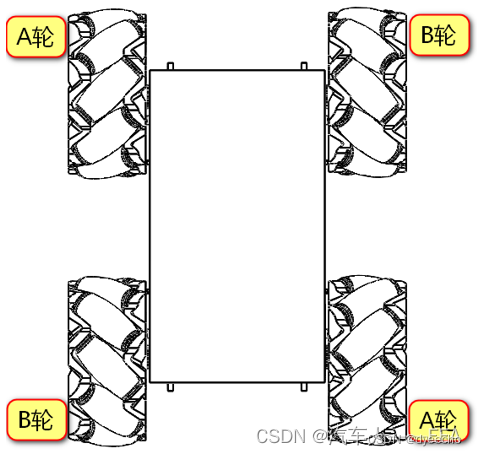
首先是俯视安装,仔细观察一下麦轮之后发现麦轮其实俯视和透视时是不一样的,因此俯视时看到的轮子左右旋其实和接触地面左右旋(也就是透视)是不同的,也因如此我在第一次安装麦轮的时候出现了问题。其实麦轮有两种安装方法,只要保证对角的轮子左右旋方向相同即可。

我们在放一张透视图(也就是地面投影图)
二、单个轮子速度分解
1、单轮向前运动(右上和左下轮)
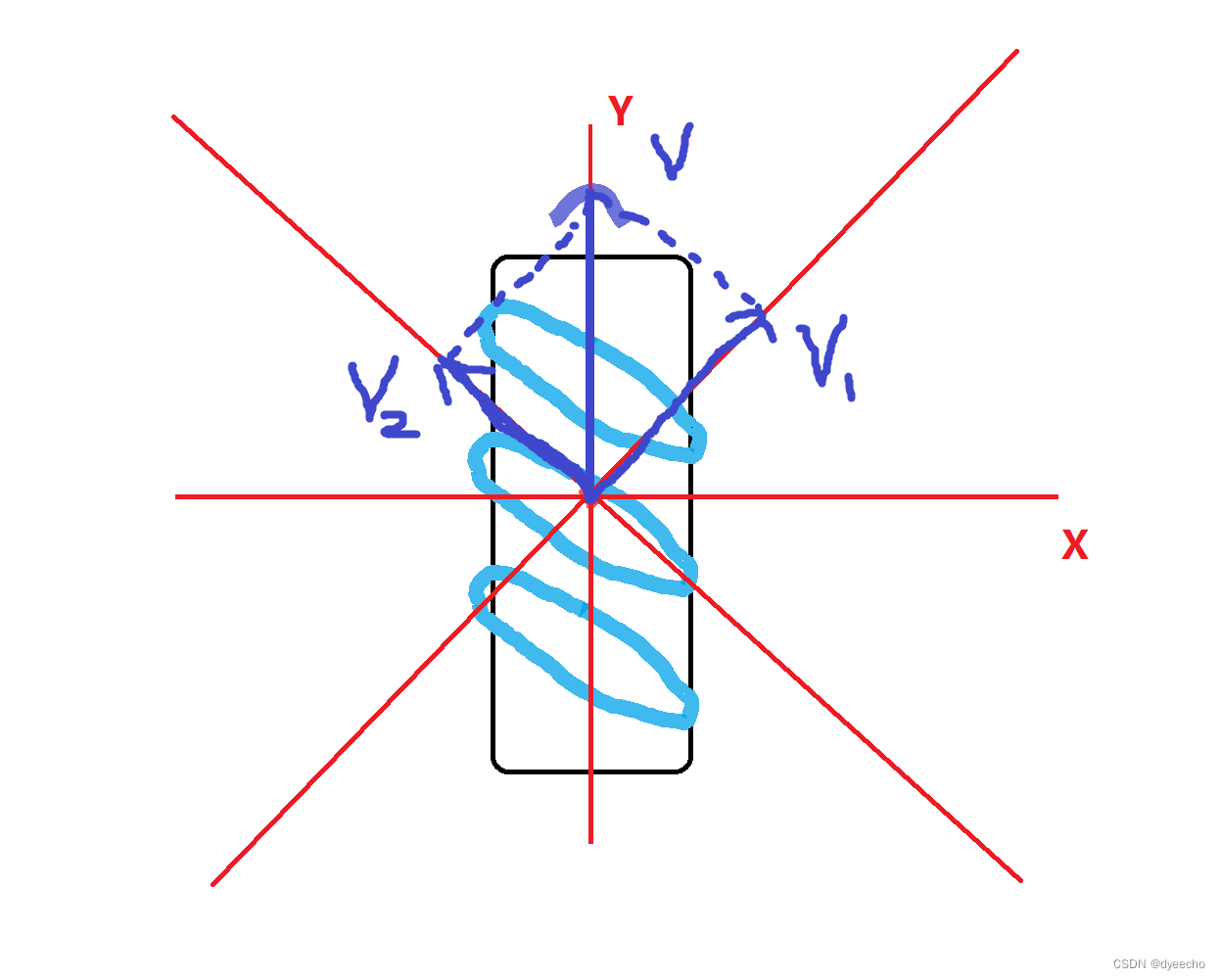
我们先对麦轮有整体的认识,假设麦轮以V的速度在向前旋转,因为辊子(也就是麦轮上的小轮子)的存在我们必须要把速度分解到沿着辊子安装方向和垂直与辊子安装方向,因为辊子会把垂直于辊子的速度抵消掉。
图1
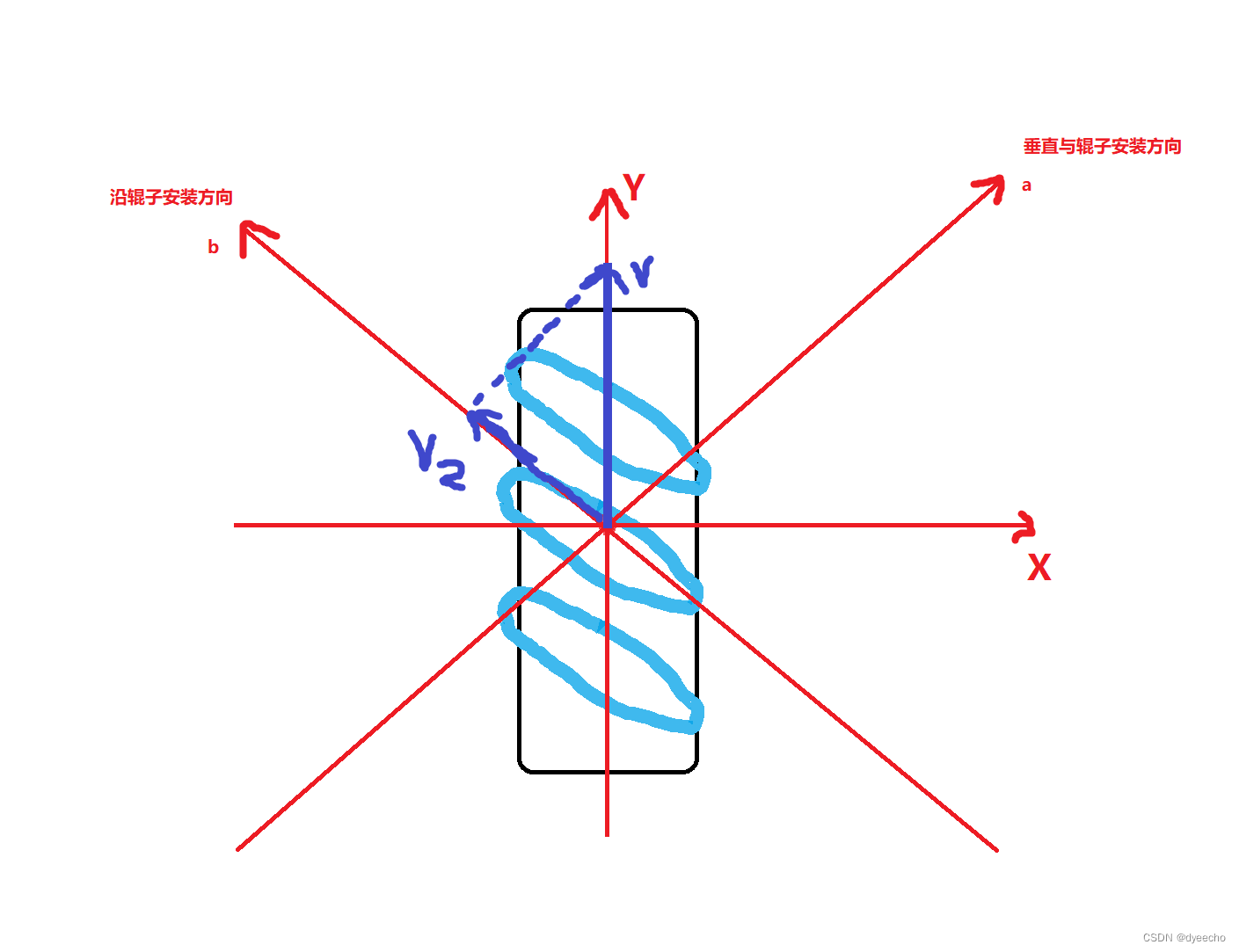
为了方便下文将会把沿辊子安装的方向称为b方向,垂直与辊子安装方向称为a方向。
图2
根据图一的分解,我们知道a方向的速度将会被辊子的旋转而抵消,所以这个轮子只会在b方向上起到作用并且V2的速度只有V的二分之根号二倍。
图三
2、整车分析
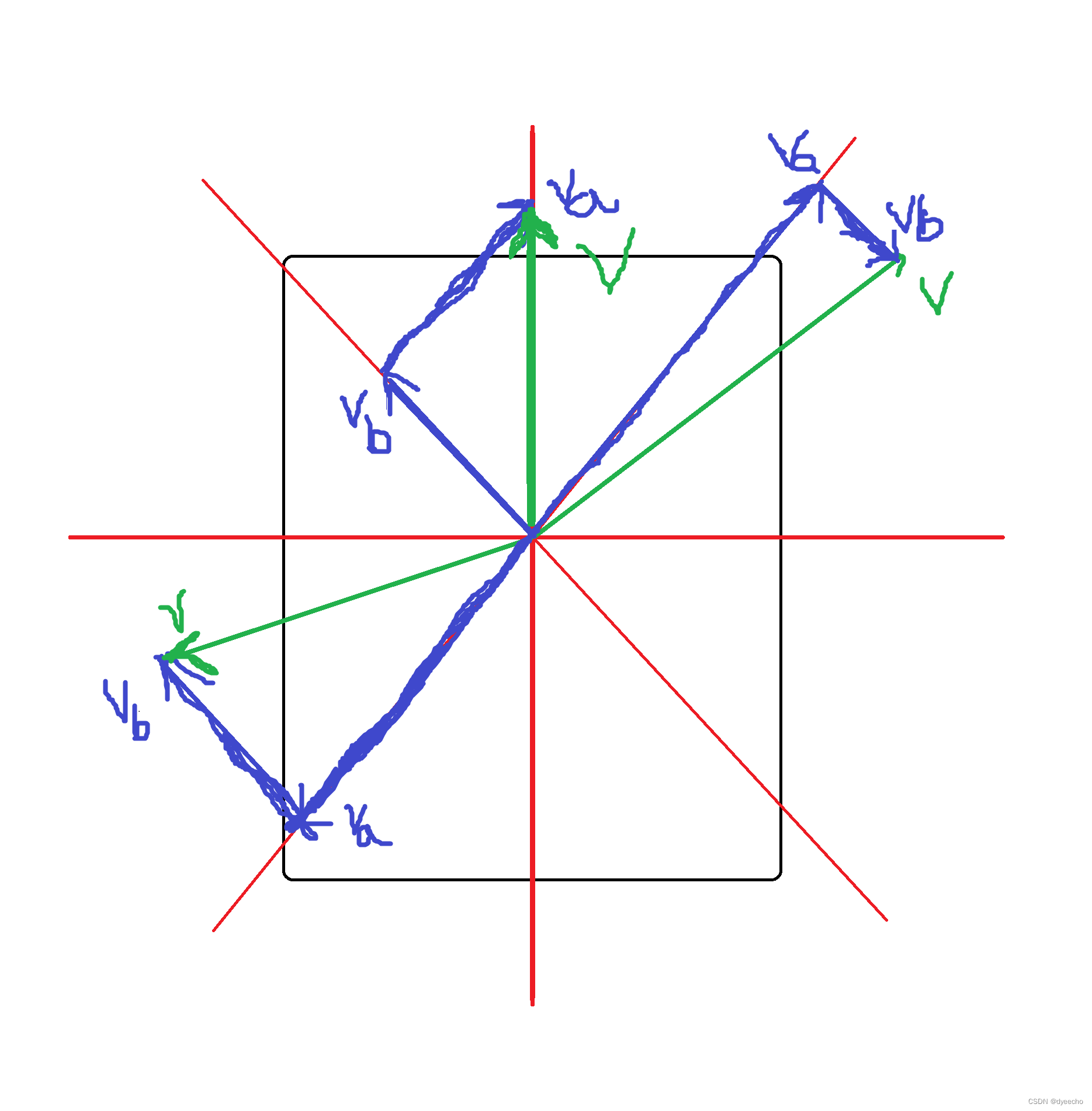
此后我们把每个小轮的转速分别成为V~1~、V~2~、V~3~、V~4~,把整车的速度称为V。
我们把V~1~沿着b方向的速度称为V~b1~将沿a方向的速度成为V~a1~。
如图所示实际上右前轮子和左后轮子只对b方向起到了作用,而左前轮子和右后轮子只对a方向起到了作用。
图四
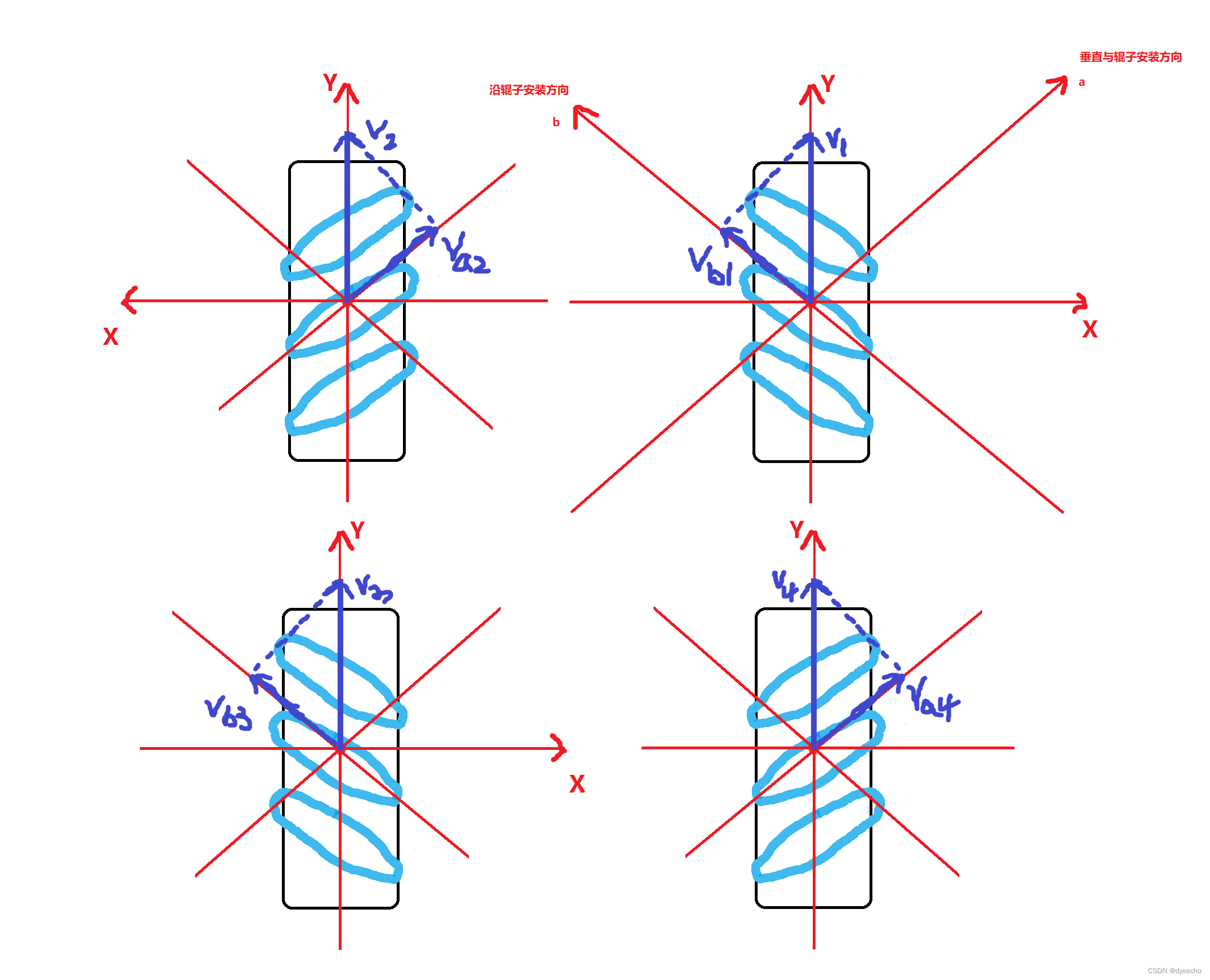
因此我的想法是将左后轮和右前轮看成一个整体他们联合控制b方向的速度,左前轮轮和右后轮看成一个整体他们联合控制a方向的速度。整车的速度就是他们两个方向速度的和速度。
即V~b~=V~b1~=V~b2~
V~a~=V~a1~=V~a2~他们的和速度即为小车的真实速度。
图五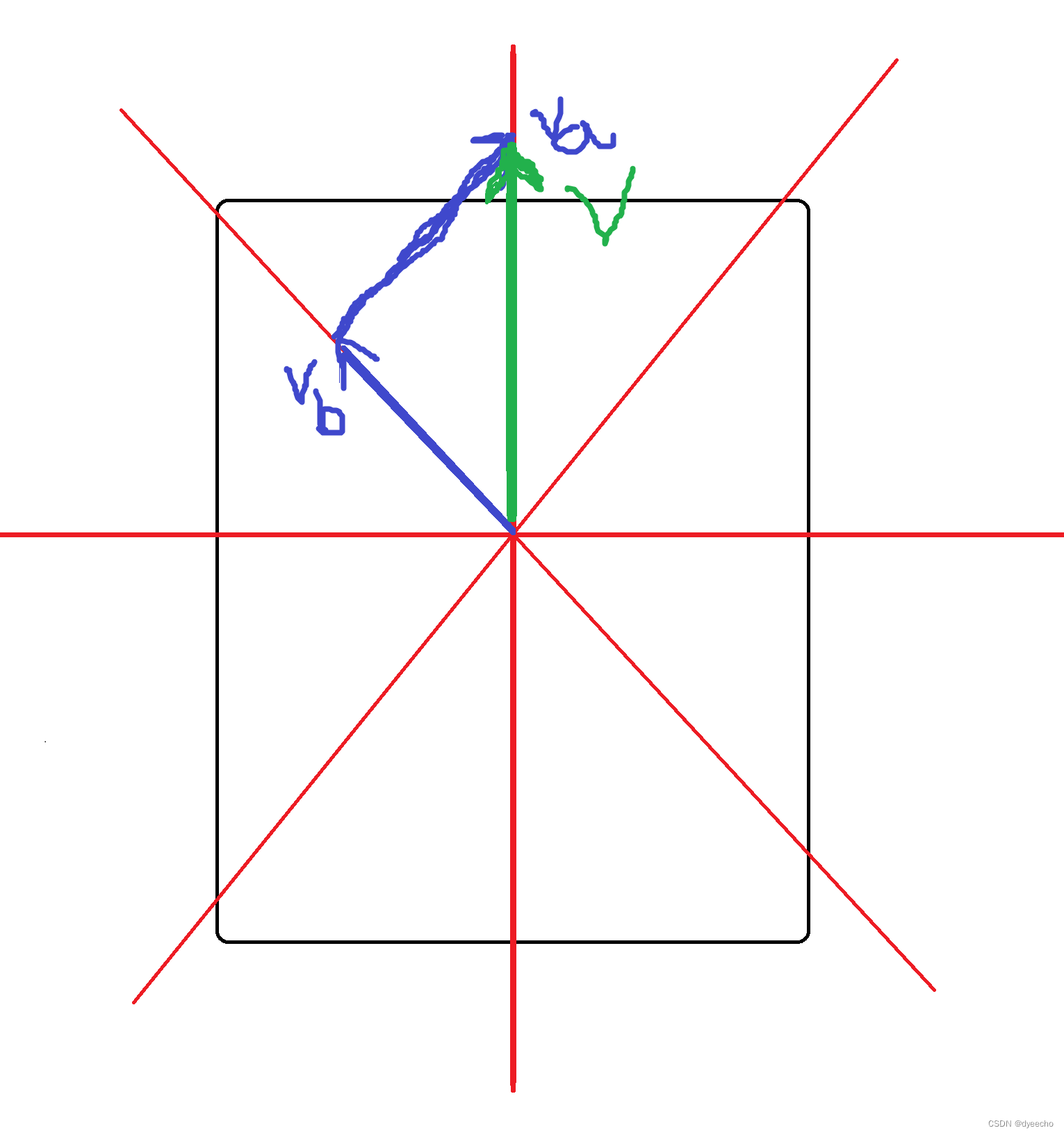
所以如果要实现最终的和速度可以在360度的任何方向和大小只需要控制V~a~和V~b~的大小。
如图列举的是三个不同的速度时候a方向的速度和b方向的速度。
图六
总结
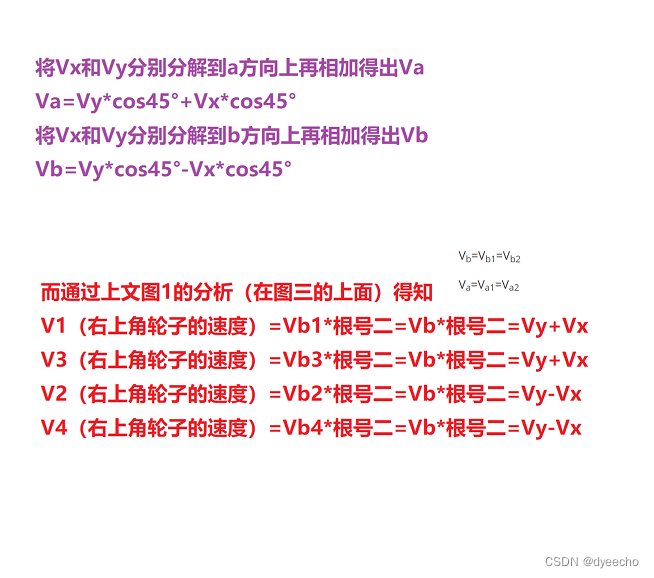
所以我们剩下的问题就是知道我们的目标速度方向和大小即V~x~和V~y~如何推算出各个轮子的转速大小。
图七

最后得出结果如果遥控器反馈相应的Vx和Vy那么各个轮子的速度为如下结果。
后续
后续更新麦轮自旋加360度控制、全向轮结算、舵轮结算。


