
- 1实战 Centos7 oracle12c rac集群部署;
- 22. 【数据结构】顺序表专题
- 3152Vue-编程式导航$router.push\$router.go+back()_router.back和router.go(-1)
- 4在金仓数据库中导入sql文件,解决中文数据乱码问题_kingbase 导入sql文件
- 5关于IDEA出现报错: java.io.FileNotFoundException HADOOP_HOME and hadoop.home.dir are unset_exception in thread "main" java.lang.runtimeexcept
- 6Python基于Opencv和SVM机器学习算法和百度AI平台车牌识别系统设计毕业源码案例设计_毕设调用百度车牌识别api怎么解释其中的算法
- 7gcop:简化 Git 提交流程的高效助手 | 一键生成 commit message_git提交代码如何自动生成提交信息
- 8github项目的下载与上传_github中找不到 clone download
- 9手摸手教你在CentOS7上离线安装mysql-8.0.32(已实战多次)_centos 7 离线安装mysql
- 10在本地python进行mapreduce时遇到的一些麻烦_found 2 unexpected arguments on the command line
(FPGA时序约束)set_multicycle_path详解_set multicycle
赞
踩
1.定义
和set_max_delay/set_min_delay一样属于时序例外的一种。
时序例外在之前的文章中讲过,如果不去约束的话,可能会造成时序资源的浪费,不因该分析的分析了,不应该优化的优化了,不应该这么严格去分析的也这么严格的去分析了,跑这样的程序浪费电脑资源,同样也会增加运行时间。
时序例外有几种:
(1)set_false_path:直接设置不分析
(2)set_max_delay/set_min_delay:直接覆盖默认requirement
(3)set_case_analysis:设置pin或port为常数或特定跳变沿,相当于设置palse_path
(4)set_multicycle_path:相对于源时钟或者目的时钟去调整requirement
针对set_multicycle_path,其定义为:根据源时钟或目的时钟,通过修改路径requirement倍数,改变路径requirement,来放松该路径的setup或hold分析要求,以满足时序收敛。
这里再解释一下什么是requirement,vivado工具默认进行的是单周期的时序分析,一般一条时序路径默认对应了一个requirement,是根据时钟周期来确定的,也就是一般情况下setup的requirement是一个时钟周期(默认单周期分析,当前时钟launch,下个时钟周期capture),hold的requirement就是0;
2.语法及说明
set_multicycle_path <path_multiplier> [-setup|-hold] [-start|-end] [-from <start_point>] [-to <endpoint>] [-through <pins|cells|nets>]
其中:
[-setup|-hold]表明是调整建立时间的还是保持时间的;
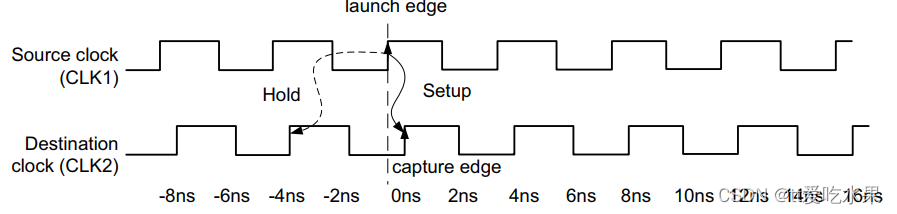
[-start|-end]表明是相对于源时钟还是相对于目的时钟来调整,setup默认对应-end,hold默认对应-start,如果要对应源时钟来调整setup,则使用-setup -start,hold同理,如果是两个时钟一致,则-end/-start没有区别,UG903里有一个官方的总结:
上图中的Moves the launch edge和Moves the capture edge也正是set_multicycle_path的调整方式,就是挪动默认的发起沿和捕获沿, 无论是setup还是hold,requirement就是两个沿的时间差。
但是这里需要注意的是,由于保持时间检查是在建立时间检查的基础上进行的,也就是说,得先确立一条路径的建立时间检查的发起沿和捕获沿,才能确认该路径的保持时间检查需求,这是因为,保持时间检查是为了确保两个事儿:
(1)当前发起沿发送的数据,不被当前捕获沿之前的时钟沿所捕获
(2)当前发起沿的下一个时钟沿发送的数据,不被当前捕获沿所捕获
然后工具会去分析,以上两个关系中哪个情况比较恶劣,选最坏的哪个作为该路径的hold分析时钟沿基础,这是xilinx所有FPGA时序分析的基础,也比较关键。
再回到主题,如果你只调了建立时间的multicycle,相当于发起沿或者捕获沿的位置变了,这时候,hold分析用的时钟沿关系就也变化了,所以,一般调整了setup的多周期路径,就得跟着调整hold的多周期路径。
3.举几个例子
(1)相同时钟域下的多周期路径

这种路径也是非常常见的一种多周期路径,默认情况下,静态时序分析工具(STA)会认定其建立与保持时间关系为:
这也是在实际工程中比较常见的场景,此时可能由于DATAPATH过于复杂,导致数据无法在一个时钟周期内稳定下来,或者数据能在一个时钟周期内稳定下来,但是在几个时候周期后才会去使用它,这时候就需要用户去指示STA工具这是一条多周期的路径,需要以例外的方式处理它。
0ns处为发起沿,4ns处为捕获沿,这是这条路径最差的建立时间关系,所以setup requirement就是4ns(一个时钟周期),在此基础上,衍生出两个hold关系(如前面所述),选其中最差的(两个一致),就是途中标hold的那个关系,两个时钟沿做差,结果为0,所以hold requirement就是0ns。
在上述基础上,给两个寄存器加上个CE(clock enable)信号,这个信号两个时钟周期拉高一次,也就是如下图所示的关系:

这时候,如果还是按照上图中的关系去分析建立时间,会造成STA的资源浪费,应为没有必要让建立时间关系这么紧,实际上,建立时间关系可以放松到下一个时钟沿,也就可以如下设置多周期:
set_multicycle_path -setup -end 2 -from <startpoint> -to <endpoint>
其中2是path_multiplier,可以这么理解,setup是指定分析沿向指定方向移动path_multiplier-1个时钟周期,hold的path_multiplier是指定分析沿向指定方向移动path_multiplier个时钟周期。
但是经过这么一调整,setup的requirement放松了,但是hold关系变了,变成下面的关系了:

这样的hold关系是很难满足的,因为捕获沿后移,对应的捕获沿前一个时钟沿也相当于后移了,根据hold slack = data_arrive_time - require_time,而其中的require_time = capture_edge + clock_delay + hold_time,capture_edge变大了,slack为正的难度就变大了。
所以这时候就需要再对hold的关系进行调整:
set_multicycle_path 1 -hold -end -from <start_point> -to [end_point]
这里的1代表,将hold分析中的目的时钟沿(由于使用了-end)向前移动1个时钟周期。
这时候,setup和hold关系就变为:

STA在以上的基础上去分析才是最优的。
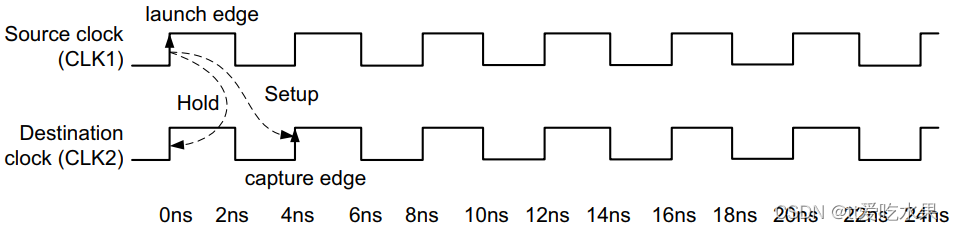
(2)同频不同相的两个不同时钟之间的多周期
假设clk1和clk2周期相同为4ns,相位差0.3ns,如下所示:

默认时序分析图如下:
因为vivado会在两个时钟公共周期内取最差的一条来当作setup分析的基础,所里这里setup需求为0.3ns,这基本是不可能满足的,且在这种情况下hold分析的需求是-3.7ns,这个需求又是十分宽松的。所以需要通过多周期进行调整这些不合理:
set_multicycle_path 2 -setup -from [get_clocks clk1] -to [get_clocks clk2]
(3)慢时钟到快时钟
假设clk1周期是clk2的三倍,默认关系如下:
 应调整为:
应调整为:
set_multicycle_path 3 -setup -from <start_point> -to <end_point>
set_multicycle_path 2 -hold -end -from <start_point> -to <end_point>
调整之后:

(4)快时钟到慢时钟
假设clk2周期是clk1的3倍,默认关系如下:
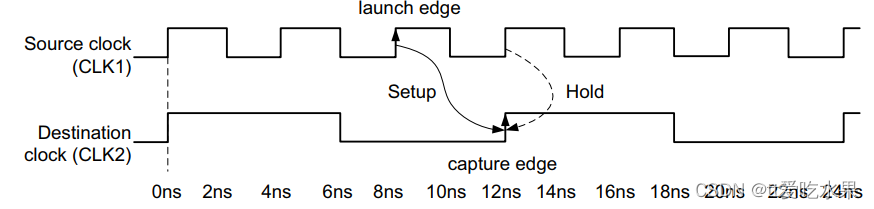
应调整为:
set_multicycle_path -setup -start 3 -from <start_point> -to <end_point>
set_multicycle_path -hold 2 -from <start_point> -to <end_point>
调整之后:


