
- 1Unity + 腾讯云 Severless:重构计算模型,打造构建元宇宙的核心引擎_unity 云引擎
- 2pytorch学习笔记(三十一):门控循环单元(GRU)_pytorch lstm gated recurrent unit 网络
- 3Spring Boot整合MyBatis Plus实现基本CRUD与高级功能
- 4OpenSSL.SSL.Error: [('SSL routines', 'tls_process_server_certificate', 'certificate verify failed')]
- 5Palworld幻兽帕鲁世界参数修改最佳实践(Ubuntu)_幻兽帕鲁词条修改
- 6vue3 使用 vue3-video-play 进行在线视频播放_vue3-video-player
- 7现代数字信号处理总结 上_集总平均和时间平均
- 8k8s 虚拟机挂起、恢复后网络不通 ,或其他网络问题解决方案_[error] plugin/errors: 2 6675404304418824035.80267
- 9SpringBoot+MySQL(官方案例)
- 10conda 克隆/复制 虚拟环境_conda复制虚拟环境
卡尔曼滤波
赞
踩
本文参考:从放弃到精通!卡尔曼滤波从理论到实践~_哔哩哔哩_bilibili
目录
1.卡尔曼滤波入门
卡尔曼滤波的引入:
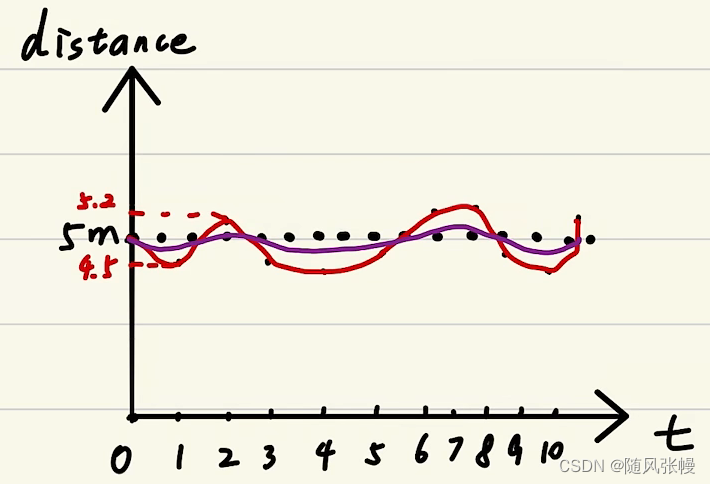
滤波就是将测量得到的波形中的的噪声过滤掉,使得到的数据更趋于真实情况,也更加平滑,方便使用。如下图所示(红色曲线是测量直接得到的波形,紫色曲线是滤波后得到的平滑曲线)
卡尔曼滤波适用的系统:
卡尔曼滤波适用线性高斯系统
1.线性系统:满足叠加性和齐次性
叠加性:
齐次性:
2.高斯系统
高斯:噪声满足正态分布


宏观意义:
滤波即加权
理想状态:信号
1+噪声
卡尔曼滤波:估计值
2.学卡尔曼滤波的必备知识
2.1.状态空间表达式
:当前状态的值;
:上一个时刻该状态的值;
:输入,即给到
:过程噪声
A:状态转移矩阵,代表当前状态上一时刻的值乘上A这种关系,作用在该系统
B:控制矩阵,输入乘上B这种关系,作用在该系统
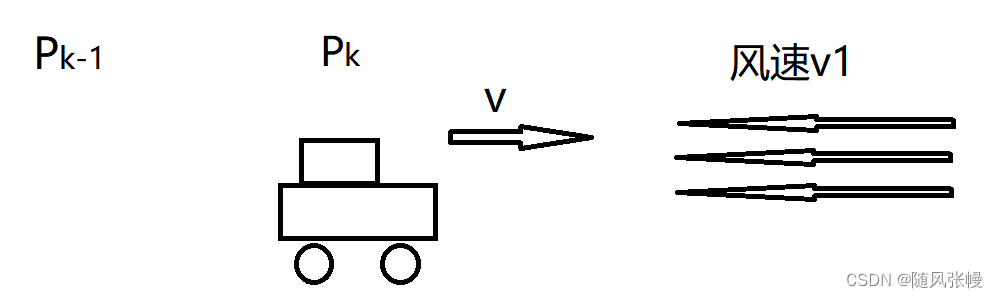
举例:一辆小车以速度v在路上行驶,迎面而来的风速v1
那么状态方程与该情形对应关系如下


C:
:观测噪声,和观测器的误差有关
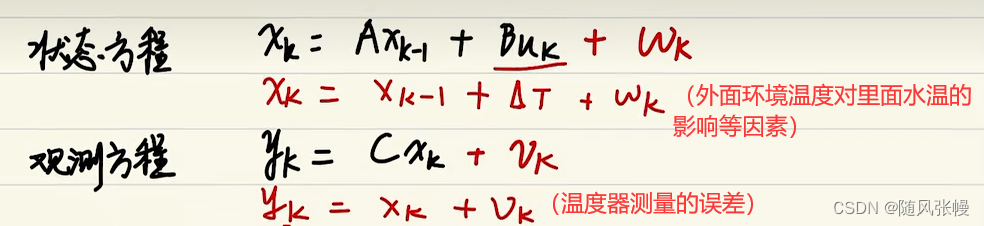
举例:火炉对水加温,蓝色点是水温的状态值,红色的点是温度计,温度计是一个传感器得到观测值
那么状态方程和观测方程与该情形对应关系如下
方框图表示如下所示



2.2.高斯分布
高斯分布直观图解:
二维中,所有值投影到x轴或y轴,都是正态分布



高斯分布参数分析:
统称
举例1:GPS检测到小车的位置,检测到小车开了1000米,但是GPS有精度误差,因此要加上
米的噪声,该噪声就是观测误差,
=1
举例2:有一个滑板,滑板前进的速度是5m/s,由于风的作用,因此滑板的速度有一个噪声
,则
=1


2.3.方差
一维方差:
(1)噪声的方差:前面的
(2)状态的方差:后面会提到状态估计值
的方差,
举例:小车实际跑了10米,但是由于噪声的影响,小车跑的距离是一个范围,服从正太分布,此时小车跑的距离就是10+
二维协方差:cov(x,y)
一维的状态估计值
二维的
对于二维的

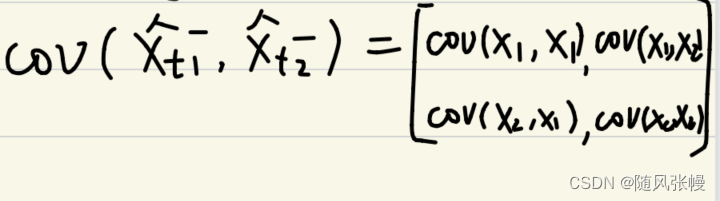
多维协方差矩阵C:

2.4.超参数
实验中,需要自己调来提高系统性能的参数:
卡尔曼滤波器中:Q(过程噪声的方差) R(观测噪声的方差)
PID控制器中:P I D
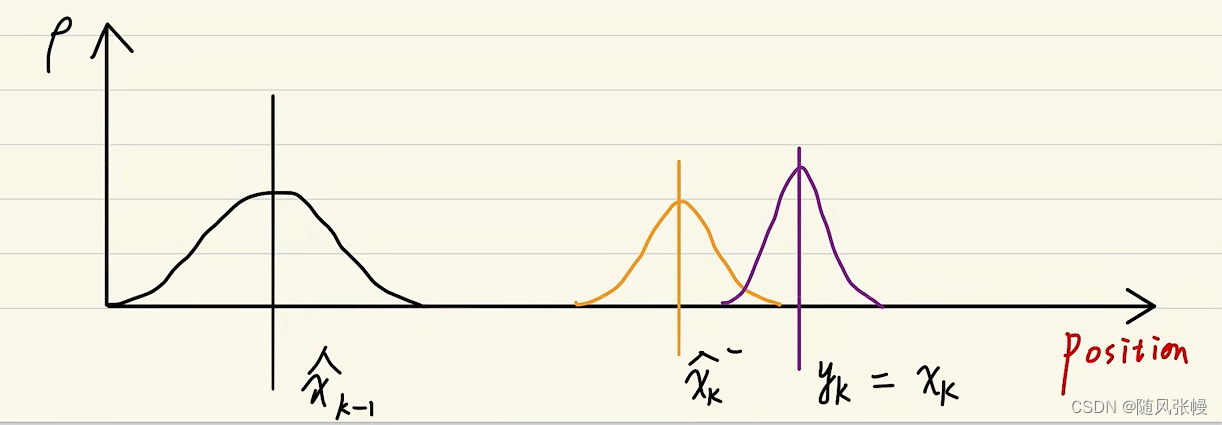
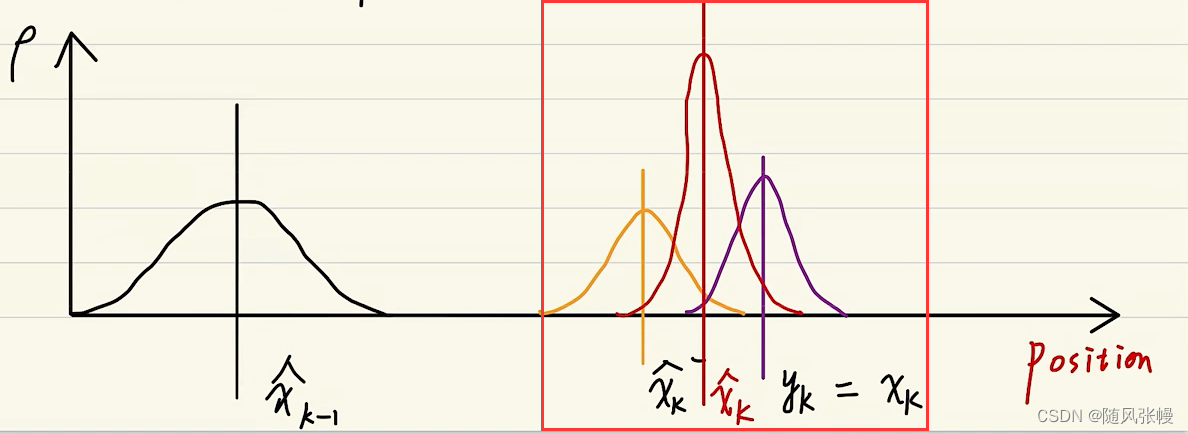
2.5.卡尔曼直观图解
横轴为车的位置,竖轴为概率密度。
:状态量旁边没有横杠就是最优估计值(修正值、后验估计值)
:状态量旁边有横杠就是预测值(先验估计值)
:观测值,也就是传感器直接测量得到的值
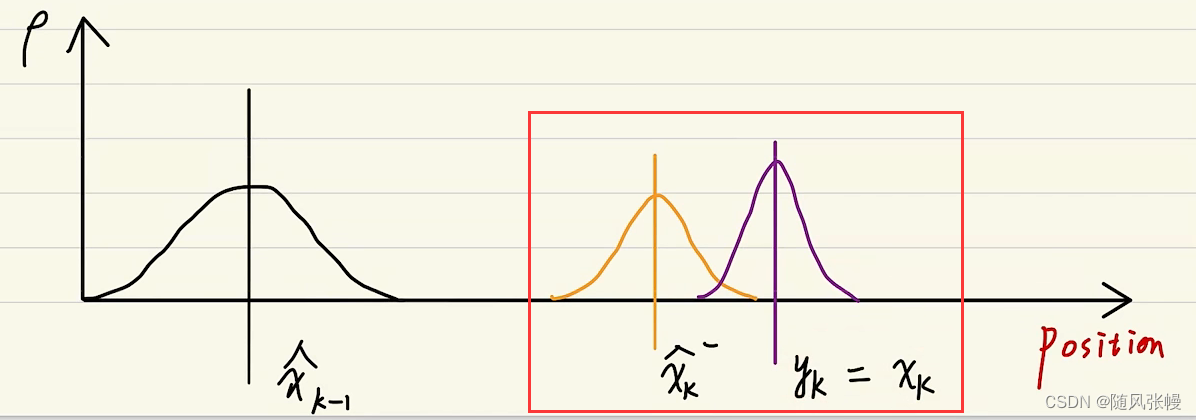
图解:
(1)
是上一时刻的最优估计值,也就是上一时刻卡尔曼滤波最终输出的值
(2)
(3)

3.卡尔曼滤波
3.1.卡尔曼公式理解
实现过程:使用上一时刻的最优结果预测这一时刻的预测值,同时使用这一时刻观测值(传感器测得的数据)修正这一时刻预测值,得到这一时刻的最优结果
注:当状态值是一维的时候,H和I可以看作是1
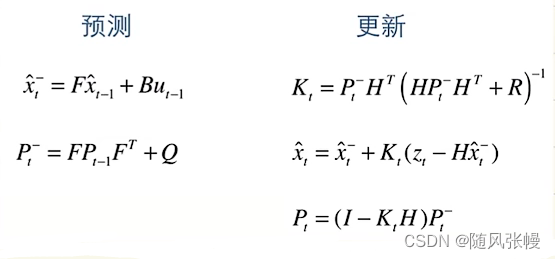
预测:
1.上一时刻的最优估计值,推出这一时刻的预测值:
2.上一时刻最优估计值方差/协方差和超参数Q推出这一时刻预测值方差/协方差
深入理解,Q其实对应的是过程噪声的方差
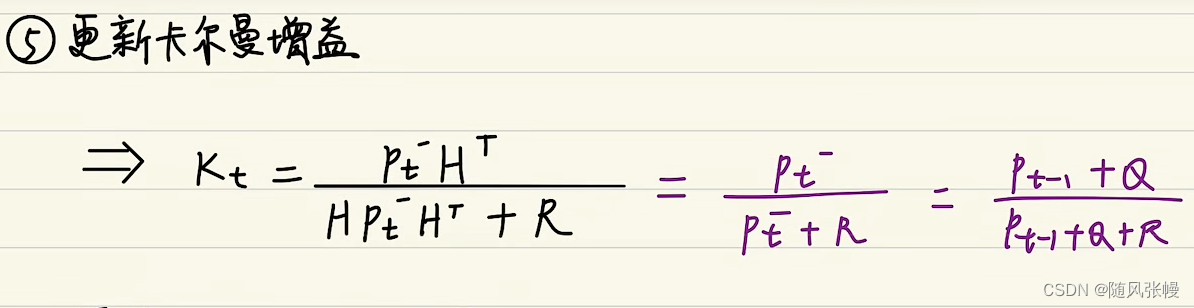
更新:
1.这一时刻预测值方差/协方差和超参数R推出卡尔曼增益
为卡尔曼增益
因为
是和Q有关的,所以将
深入理解,R其实对应的是观测噪声的方差
2.这一时刻预测值、这一时刻观测值、卡尔曼增益推出这一时刻最优估计值
为这一时刻观测值
3.这一时刻预测值方差/协方差、卡尔曼增益推出这一时刻最优估计值方差/协方差





举例:
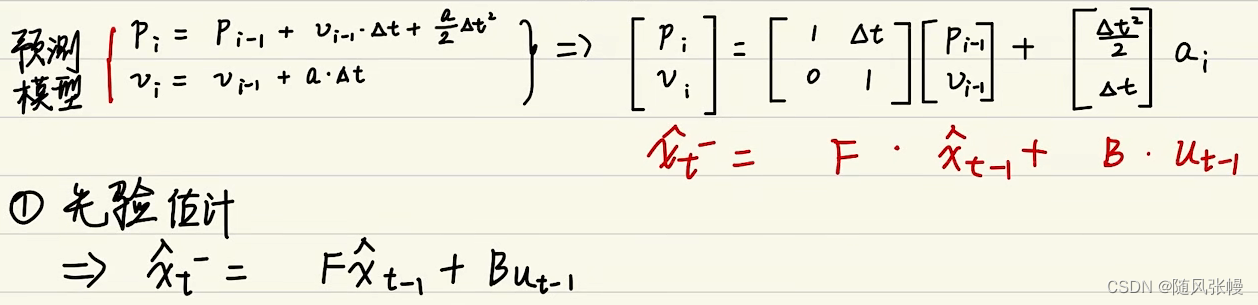
小车有两个状态值,p代表位置,v代表速度。小车处于匀加速直线运动
预测模型:
1.上一时刻的最优估计值,推出这一时刻的预测值:
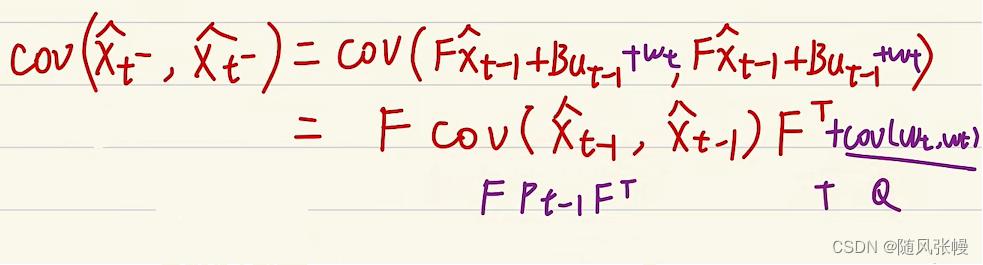
2.上一时刻最优估计值方差/协方差和超参数Q推出这一时刻预测值方差/协方差
推导:
因为
所以
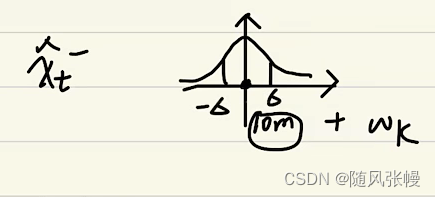
其实第一步中这一时刻预测值后面应该还有一个过程噪声Wt要加上(前面省略了),如下图所示,这里面Q是前面省略的过程噪声Wt的方差
测量模型:
GPS测量只能测量小车的位置,不能测量小车的速度,所以
Zp是小车此时的真实位置
Zv是小车此时的真实速度
Pt是测量得到的小车此时的位置
Pt是GPS测量位置的误差
更新模型:
1.这一时刻预测值方差/协方差和超参数R推出卡尔曼增益
前面测量模型中,因为无法测速度,测量相当于是一维的,一维时H看作为1
2.这一时刻预测值、这一时刻观测值、卡尔曼增益推出这一时刻最优估计值
3.这一时刻预测值方差/协方差、卡尔曼增益推出这一时刻最优估计值方差/协方差







预测更新循环往复,就能得到每一时刻的最优估计值

3.2.调节超参数
3.2.1.Q和R的取值
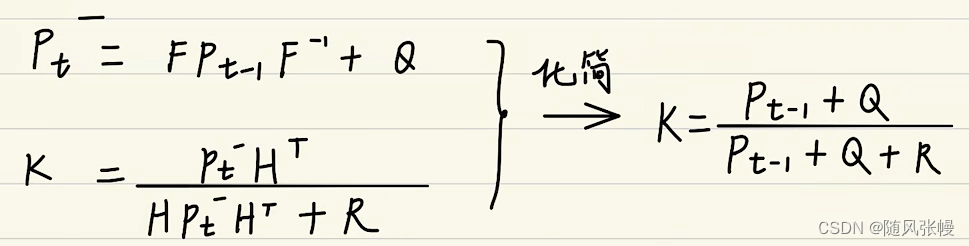
当F=1且一维的情况H=1,那么
再结合这一时刻最优估计值的公式,如下:
可以得出:
当我们更信任观测值时,那么应该让卡尔曼增益K增大;从K的公式中可以看出,R越小K越大,Q越大K越大
当我们更信任模型估计值时,那么应该让卡尔曼增益K减小;从K的公式中可以看出,R越大K越小,Q越小K越小
结论:
当我们更信任模型估计值时(模型估计基本没有误差),那么应该让K小一点,我们应该将R取大一点,Q取小一点
当我们更信任观测值时(模型估计误差较大),那么应该让K大一点,我们应该将R取小一点,Q取大一点

3.2.2.P0和X0的取值
和
的取值其实是比较随意的,因为经过后面几轮迭代后,就会很快趋于稳定值

3.2.3.卡尔曼滤波的使用


