
- 1【微信小程序】wxml、wxss、js、json文件介绍_wxml文件
- 2linux-caffe-gpu 编译注意_undefined reference to `cblas_daxpy
- 3Day12【元宇宙的实践构想01】—— 元宇宙概念和发展历程_元宇宙实践
- 4python判断图片相似度_Python-OpenCV 比较图片相似度
- 5wpf 列表数据刷新问题_wpf observablecollection 排序刷新问题
- 6python正则表达式二_正则表达式 首字母大写7位数字
- 7QML语法
- 8初识QT5_qt5是什么
- 9vue中标题太长需要限制字数多余字变成..._vue文字过长变...
- 10Tkinter个人音乐播放器及碰到的一些问题_python音乐播放器 能否播放 m4a
GelSight视触传感器使用方法
赞
踩
一、背景
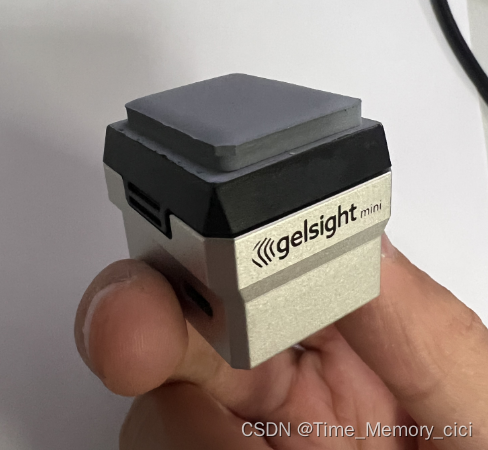
Gelsight是MIT团队于2009年开发的视触传感器,用于测量接触物体的形状、纹理和受力情况。特别地,Gelsight还能进行滑动检测。为了使机械臂可以进行一些更精细地操作,实验室采购了一些Gelsight mini安装在二指末端夹爪上。现记录一下Gelsight和机械臂夹爪联合使用的方法,以防后期忘记。
二、Gelsight开箱
一个精致的小盒子,向上掰开两个卡扣即可打开。

打开箱子,从上到下,从左到右,一共四样东西,数据线(一头连接Gelsight,一头是Typt-C口的,用于连接电脑),marker标记的弹性体盖(黑色的那个,可以识别力的方向,具体应用可参考文献),Gelsight本体(带有识别物体形状的弹性体盖),调节分辨率的工具(一般用不到)。

Gelsight本体:
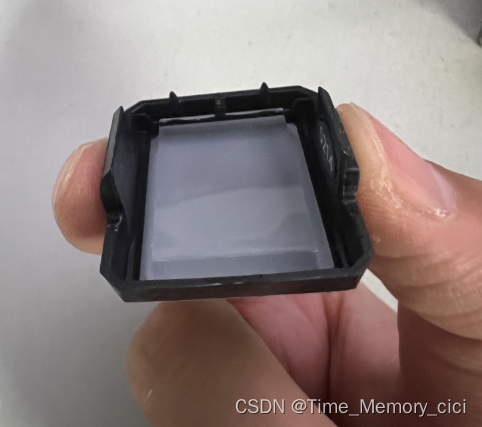
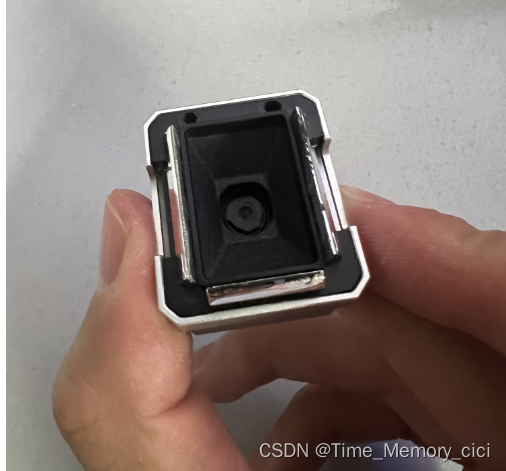
更换弹性体盖子的方法,捏住两边,然后往外拔。安装另外的弹性体盖,一定要注意两个引脚的位置,对应与Gelsight的两个小孔,如下面两张图所示,千万不要大力出奇迹,硬连接。
三、Gelsight使用方法
这一步测试在windows即可:
1、Gelsight传感器连接电脑。
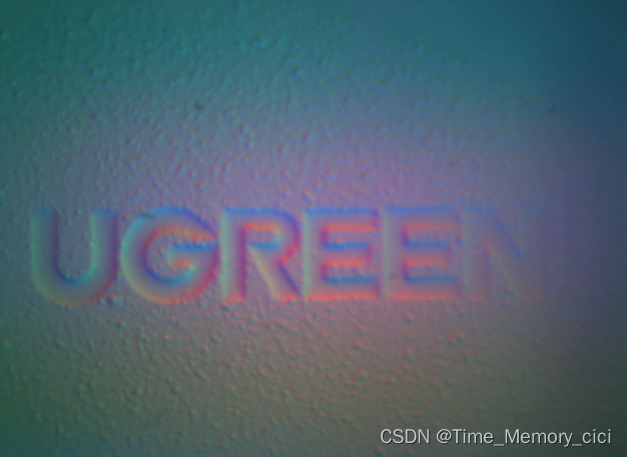
2、登录https://www.gelsightmini.com网站。当使用物体与压弹性体接触时,该页面可以看到接触物体的表面形状,如下图所示:
Gelsight成像效果。
实物照片:

如果想读取marker的方向,也就是使用其感知交互力的功能,尽量在ubuntu系统下操作
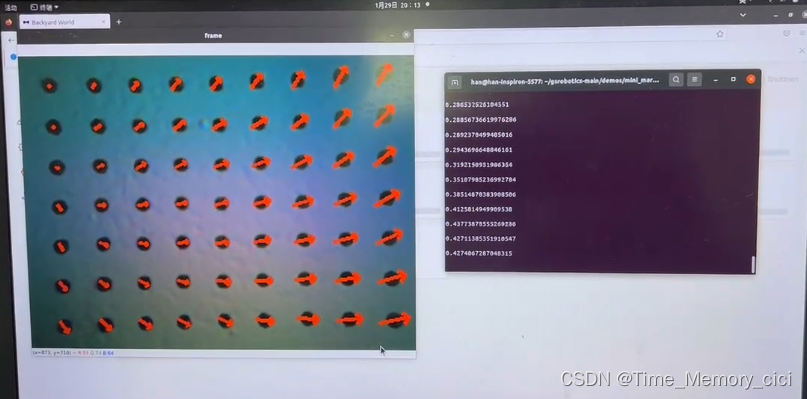
四、Gelsight与机械臂末端执行器联合使用
我们实验室所使用的是巴毅自动化公司生产的BY-E140型号的末端执行器。
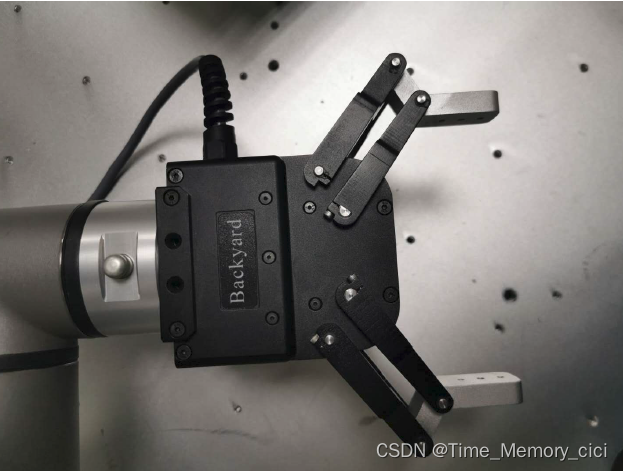
末端执行器控制方式可以分为有线连接和无线连接,我们一般是使用有线连接,即通过网线将末端执行器控制盒与笔记本电脑相连。
此外,需要配置修改本机电脑IP与夹持器保持同一个网段,夹持器出厂默认IP为192.168.137.9,那么本机对应网卡的IP则可以修改为192.168.137.xxx,其中xxx为非9的,1-255之间的数字,子网掩码:255.255.255.0。(在ip v4中修改)
有线连接时,在浏览器上输入192.168.137.9即可登录夹持器配置界面。
Gelsight的SKD包可以登录Gelsight的github网站下载https://github.com/gelsightinc/gsrobotics

