
- 1『市场基础变量计算』
- 2李沐动手学深度学习V2-多GPU数据并行内容和手动实现代码_当模型大小超过gpu显存,gpu之间如何进行数据并行的切分
- 3SCI一区 | MATLAB实现BO-CNN-BiLSTM-Mutilhead-Attention贝叶斯优化卷积神经网络-双向长短期记忆网络融合多头注意力机制多变量时间序列预测_bilstm神经网络超参数
- 4[Day2] IDE DevEco Studio 的环境配置及工程创建_deveco-studio openharmony与harmonyos
- 5一文搞定人工智能、机器学习、深度学习和人工神经网络的关系_当前人工智能最尖端的发展是神经网络吗
- 6如何利用BERT做文本摘要_bertsum
- 7leaflet加载离线地图教程以及下载离线地图瓦片工具_leaflet下载试用码
- 8SLAM: SLAM的发展历程(WIKI)_slam算法的发展
- 9机器人操作——diffusion policy(2023)
- 10总结Redis Cluster原理+基本使用+运维注意事项
实车采集的数据重建场景_王宝宗:挖掘测试数据及构建场景库对提高自动驾驶安全性极其重要...
赞
踩
今天,基于51WORLD智能驾驶与智慧交通专业论坛上嘉宾演讲内容的【专家论道系列】精编文章将暂时告一段落。
文章自2月刊出以来,得到了来自客户与合作伙伴的普遍关注与厚爱。在此,非常感谢各位专家的精彩分享。同时,特别鸣谢广汽研究院智能驾驶技术部负责人郭继舜博士,商汤科技研发执行总监石建萍博士等嘉宾的大力支持。
随着新一轮技术革命和产业变革的蓬勃兴起,智能化、网联化已成为新一代汽车及交通发展的战略方向。人类的出行方式正面临前所未有的深刻变革。51WORLD坚持创新引领、立足开放合作,愿与社会各方凝聚共识,推进创新融合发展,为智能驾驶与智慧交通的产业生态日渐成熟贡献力量。

“挖掘测试数据及构建场景库是提高自动驾驶安全性能的极其重要的一步。”
——清华大学苏州汽车研究院智能网联中心技术总监 王宝宗
以下为论坛实录(经过本人授权):
大家好!很高兴能今天能和大家分享清华大学苏州汽车研究院在场景库构建方面的一些工作。我会从四个方面进行介绍。
首先,是场景库的应用背景。其次,基于视觉分析的场景数据挖掘技术。第三、场景库的架构与构建技术。最后、基于场景库的仿真测试技术。
一、场景库的应用背景
场景库应用背景,这是一款国产的和一款国外的车,在测试AEB功能的时候,两款车都发生了撞人的事件,从我们分析的角度来看,它们在感知层就出现了问题,导致它们发生了撞人的事件。
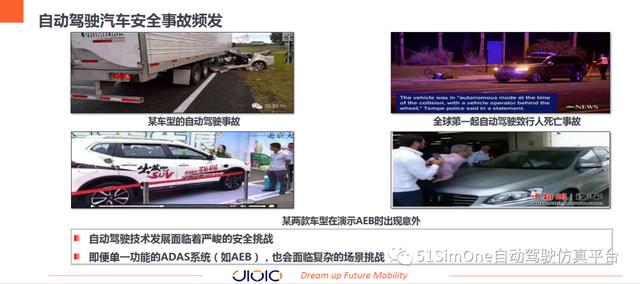
在测试的过程中,传统汽车和自动驾驶汽车是不一样的,这里主要体现在几个方面:一是测试内容的变化,传统汽车主要是测试方向盘、脚踏板机械方面的测试。自动驾驶汽车更多的是车辆感知能力方面的测试。第二,测试的工况发生了很多的变化,之前是人来测试,现在是由计算机、芯片决定接下来做什么样的决策,所以场景在测试方面起到了很关键的作用。第三,测试评价工具链发生了变化,现在更多的是用一些仿真软件,用一些在环测试。
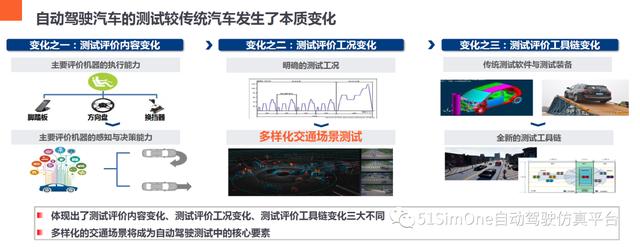
测试场景这块,我们在场景库构建方面结合了国际、国内做的一些研究,提出场景的定义,可以认为场景是一定时间和空间范围内环境与驾驶行为的综合反映,描述了道路、交通设施、气象条件、交通参与物等外部状态以及自车的驾驶任务和状态等信息。

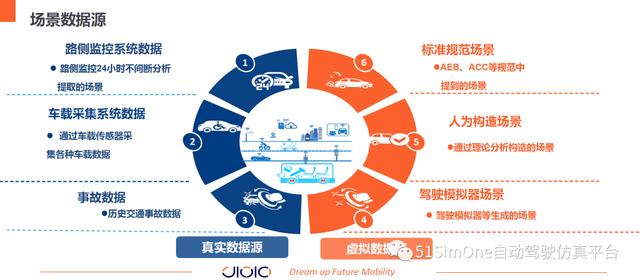
在构建场景库数据这块,主要有几个方面的数据源,左边蓝色部分是我们采集到的真实的数据,这个真实的数据有几个来源。第一个数据来源就是路侧监控系统数据,这个数据基础会构建出来很多边缘的场景,以及正常的自然驾驶状态下车辆发生的行为。第二部分,我们也会通过车载端采集一些数据,第三个是事故数据。右边的部分就是虚拟数据,虚拟数据现在有一些法规,同时还有人为构造场景。
二、基于视觉分析的场景数据挖掘技术
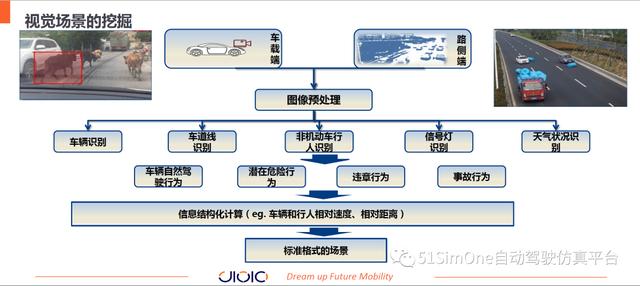
基于视觉挖掘场景都有什么优势呢?首先是视觉信息量特别大,场景要素挖掘范围广。

其次视觉传感器是常规的车载和路侧传感器,可以对交通参与物进行分类。通过运用图像分析技术会对车辆之间、交通参与物的行为进行归类,所以看到这是我们在自动化提取场景方面做的一些工作。
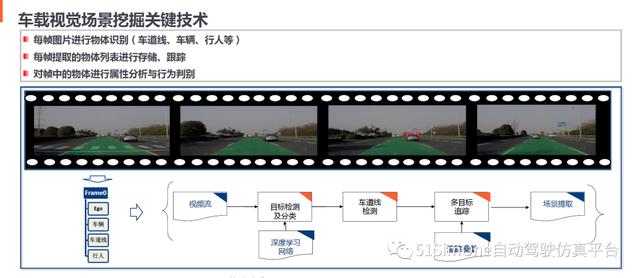
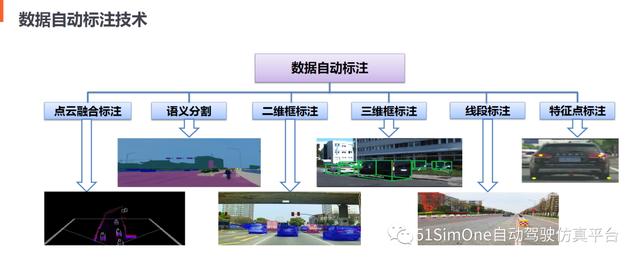
同时我们还有车载端有自动化的标注工具,可以解决标注的需求。
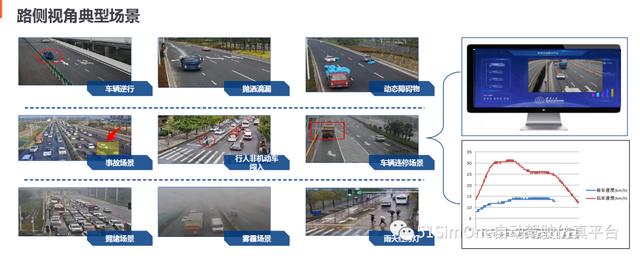
下面就是通过路测挖掘的典型的场景,可以看到,有的车会掉下来物体,这个是我们很难预测到的,但是从我们历史挖掘的数据来看,这种状况是特别特别多的,还有行人闯入了不该闯入的区域,这对我们的决策都会有影响。除此之外也会基于从路侧、车载端进行挖掘归类处理一些事故场景。


三、场景库的架构与构建技术
通过高速、城市道路、停车场,会根据每一种道路类型进行细致的分类,对于车辆交互方面,进行第三层次的分类,再进行细化,现在达到了400多种分类。这就是通过路侧挖掘出来的场景在城市道路里面,我们的车通过这辆大巴车会做出怎么样的决策呢?


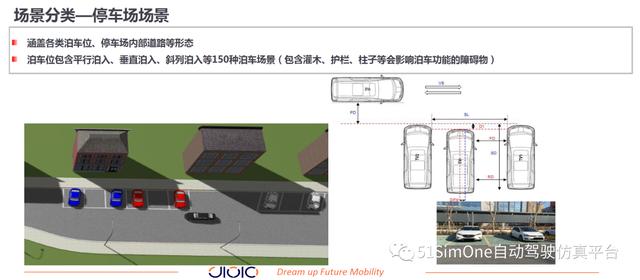

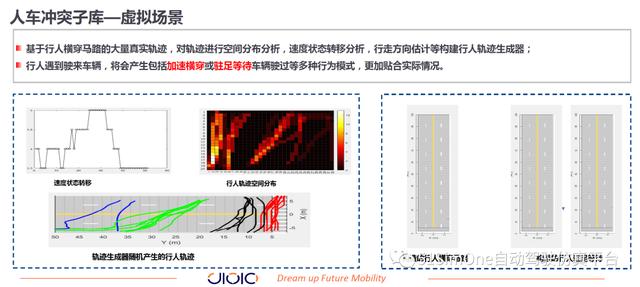
在泊车场景里面,我们在和一些车厂有合作,已经累计了200多种泊车场景方案,垂直式的,平行式的都有。关于场景库方面,我们构建了专题子库,拿人车冲突的场景来说,基于路侧摄像头挖据数据,把真实的行人、车辆之间的交互行为提取出来,形成我们的历史数据库,右侧就是从真实场景中提取出来的,一辆车通过的时候会和行人产生三种不同的交互行为。
在真实的数据基础上演绎构造出虚拟场景,基于一些行人的运动状态、速度、方向,通过算法构造出虚拟的场景。右边这辆车通过的时候,人可以做出不同的行为,可以驻足等待,或者从车的后面绕过去,这都是我们构建出来的虚拟场景。
还有一类场景就是匝道入口处会产生一些危险场景,基于我们对匝道口处车辆历史轨迹的提取和统计,累计统计了30余种匝道交互场景。

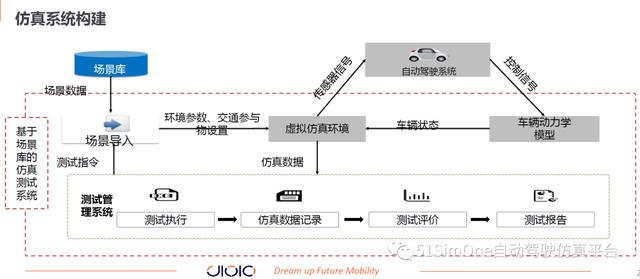
四、基于场景库的仿真测试技术
在仿真测试这块做的工作,我们把我们的场景库搭载在51Sim-One仿真软件中进行仿真,这个是我们搜集出来的一辆三轮车在城市道路逆行的场景,这种场景在国内是非常常见的。

在数字孪生方面我们也做了很多工作,现在已经把虚景实车用于我们的实际的测试当中。在实际测试当中,很多时候我们不可能拿真车真人来做测试,但是可以把一些虚拟数据注入进去来达到我们的测试目的。这就是一个案例,可以看到有一辆自行车在这里突然出现,但是它没有被自动驾驶车辆感知到,所以就撞上去了。

以上就是我的介绍,谢谢大家。

