
- 1DrawerLayout、Toolbar 的详细用法_toolbar drawerlayout
- 2人生苦短,我学python_输出人生苦短我用python
- 3系统集成项目管理工程师第三版第三章要点笔记_系统集成单元测试在哪一章
- 4Eclipse 报 堆内存不足_eclipse堆栈空间不足
- 5burpsuite安装HTTPS证书_burp证书
- 6Calendar的add和set方法的运用和区别_calendar.add(12, value);
- 7福州大学计算机类分专业排名,福州大学a类学科名单-福州大学第四轮学科评估情况...
- 8打包jar出现Exported with compile errors 一类错误的解决方法_exported with compile warnings
- 9linux as 4 虚拟机 oracle 10g安装_quick linux as4虚拟机
- 10Spring Boot 中文参考指南_springboot中文手册
Apollo智能驾驶|百度Apollo开放平台-应用层介绍(2)_apollo 9.0学习
赞
踩
应用层:价值共创,更强、更快、更丰富、更高效
为了加快企业开发者场景应用落地,Apollo开放平台9.0打造了面向封闭园区低速场景的通用能力,并从以下四个方面进行全面升级:
- 自动驾驶功能增强及稳定性提升,缩短部署调试周期,加快自动驾驶实车闭环;
- 丰富了场景功能,减少开发者场景功能开发量,缩短业务系统对接时长,助推场景应用更快落地;
- 新增ARM、Orin适配及更丰富的传感器选择,提供成本更低性能更高的硬件选择;
- 提供地图和传感器标定全流程的可视化操作工具,提高运营落地效率,降低场景运维成本。
一、开箱即用的自动驾驶系统,加快自动驾驶实车闭环
在自动驾驶能力方面,Apollo开放平台9.0针对企业开发者的使用问题和需求进行全面增强及升级:
1、定位能力:
在RTK定位的基础上,增加激光点云SLAM定位方案,解决了园区场景中的树木、建筑物遮挡导致的定位漂移问题。开发者通过该方案可以解决如下图所示的树木遮挡导致的定位漂移问题,也可以适配短距离建筑物、桥梁遮挡等场景。

遮挡环境下SLAM定位
2、感知能力:
1)Lidar与Camera融合效果优化:在感知方面,我们简化了Lidar与Camera融合的难度,同时使用百万级别的标注数据对模型进行训练,使得感知的准召率大幅提升。
2)异形障碍物检测:针对园区场景普遍存在的异性障碍物、深度模型训练时无类似标注数据、无法较好检测等问题,我们新增了背景分割算法,可以与深度学习模型配合提升异形障碍物召回率。

异形障碍物检测
3、安全性和稳定性:
除了功能增强,9.0版本在安全性和稳定性方面得到了大幅优化并通过多方验证:
1)安全性提升:9.0版本提供从信息采集、异常监测、故障报警、故障处理及展示的全流程功能安全机制,覆盖硬件、软件、车体、网络多种故障维度,同时支持企业开发者根据自身需要定制故障类型。
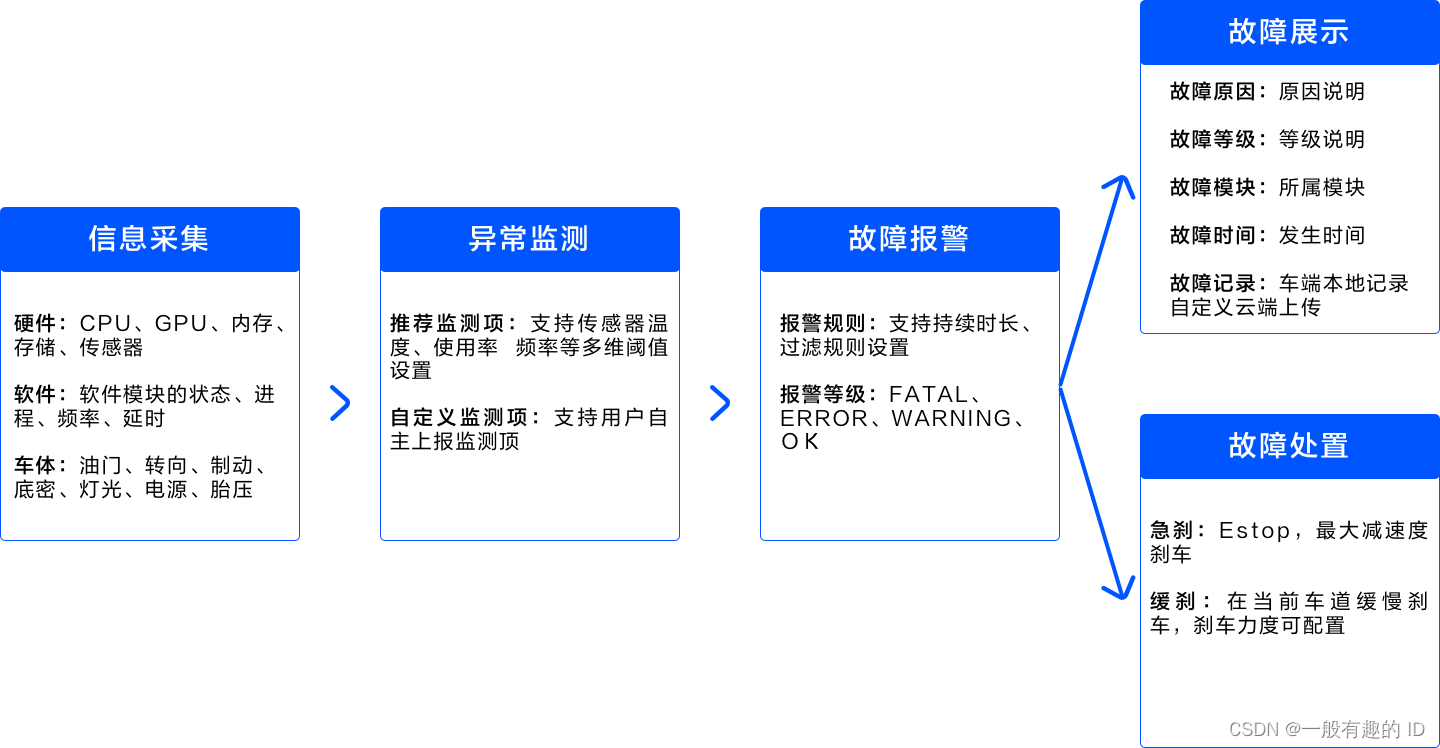
功能安全故障检测及处置机制
2)稳定性保障:Apollo联合企业合作伙伴经过两个多季度的持续测试,并在教育、矿卡、物流、环卫、巡检等超5个场景落地,经过10余家合作伙伴验证,自动驾驶任务成功率稳定在98%以上。通过功能增强、安全及稳定性提升,结合核心层的工程结构、算法能力和文档升级,整体适配环节减少40%,代码阅读量减少90%,代码调试量减少80%,企业开发者一周内即可完成自动驾驶实车闭环。
二、丰富场景能力,助推场景应用更快落地
在自动驾驶车辆完成闭环的基础上,为了加快企业者场景落地,Apollo开放平台9.0在通用能力层进行了如下优化,帮助企业开发者更快完成业务系统闭环:
1、多样的场景功能:
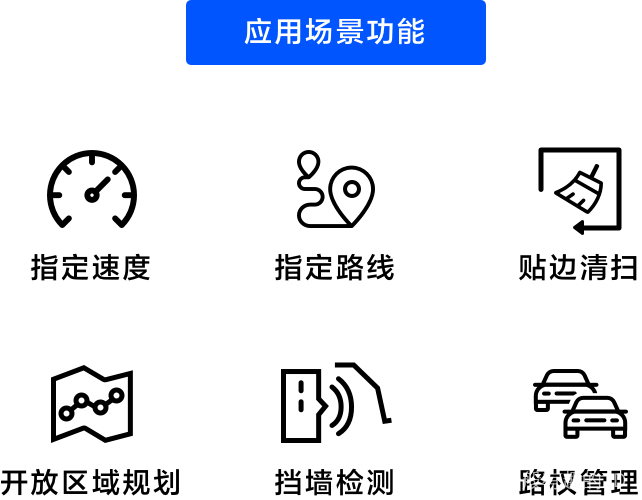
基于各应用场景需求调研及经验积累,在9.0版本中,我们对场景功能进行抽象,并提供了指定速度、指定路线、贴边行驶、开放区域规划、挡墙检测、路权管理等多样的场景功能,企业开发者可以通过接口调用和参数配置快速获取这些能力。
2、作业设备线控对接:
对于园区场景中所需的举升、清扫、喷洒、灯光语音特殊作业设备控制,我们提供了标准协议和测试工具,让企业开发者快速完成适配。

3、业务系统对接:
对于自动驾驶车辆与业务调度系统、C端应用、V2X、远程驾驶等系统的配合,我们提供了参考示例和第三方方案,让企业开发者快速完成系统对接。

经过以上优化,开发者更多的开发精力放到场景难题突破和业务系统优化中,1个月即可完成场景应用业务系统闭环。目前已有部分企业开发者基于Apollo开放平台提供的通用能力,在一个月内完成了零售、环卫场景的业务系统闭环,并圆满完成ITS大会展示。
三、丰富硬件设备选型,更低成本、更高性能
丰富硬件设备选型,有效降低开发成本
为了满足企业开发者对硬件的成本及稳定性的高要求,Apollo开放平台9.0实现了ARM架构Orin设备的良好适配,且可以支持3个Lidar和4个Camera的高性能运行,帧率在10HZ以上,CPU/GPU利用率均在50%以下。同时支持时间同步等功能,相比于X86工控机成本可降低30%以上。

在感知传感器方面,Apollo也与硬件厂商和合作伙伴构建了共建共享的协作机制,丰富了大量的设备选型。如相机支持更多的主流厂商、相机接口也从USB3.0升级为GMSL,新增多品牌多型号激光雷达,定位设备也新增多家厂商适配。后续Apollo也将持续与企业开发者、硬件厂商紧密合作,协作构建更繁荣的硬件生态,为开发者提供更低成本更高性能的多样性选择。
四、运维工具高效集成,大幅缩短落地时长
相较于车辆闭环,在运维落地场景中,工具的可用性、易用性则需要更高的要求。对此,9.0版本面向企业开发者将工具从研发态的代码开发升级为运营态的界面化操作。
1)传感器标定工具:支持Lidar和Camera的可视化标定,标定成功率90%以上。企业开发者无需车端采集数据,再上传到云端等待数据解算,标定时长由天级别缩短为小时级别。
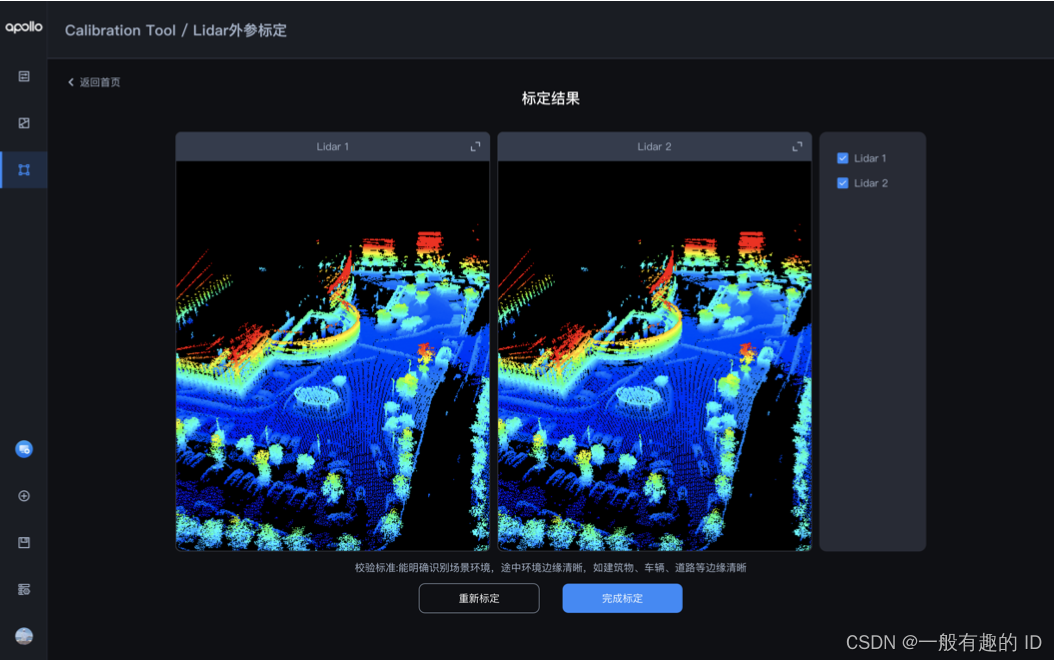
Lidar标定

Camera标定
2)高精地图制图工具:提供地图采集、制图、编辑全流程工具。企业开发者可以基于生成的底图来编辑与实际路况一致的地图数据,也可以在车端直接修改,快速完成数据更新,地图创建周期由周缩短至小时级别。

地图采集

地图编辑
以下为官方的教学课程,感兴趣的小伙伴上课学习吧~
Apollo开放平台9.0专项技术公开课链接
https://apollo.baidu.com/community/activity/16
《Apollo自动驾驶技术详解25讲》
https://apollo.baidu.com/community/online-course/77
《自动驾驶新人之旅》
https://apollo.baidu.com/community/online-course/11

