
- 1自动售货机方案/设计/开发/项目_智能售货机开发文档
- 2安装mlxtend库(stacking利器)出现问题及解决方案_pip install mlxtend安装失败
- 3【LSTM回归预测】基于开普勒算法优化多头注意力机制的卷积神经网络结合长短记忆神经网络实现温度预测KOA-CNN-LSTM-Multihead-Attention附matlab代码
- 4(跨模态)AI作画——使用stable-diffusion生成图片_stablediffusionpipeline.from_pretrained
- 5低价搭建幻兽帕鲁服务器:2024年月租26元,享受高品质游戏体验
- 6Android Studio代码无法自动补全_android studio自动补全
- 7【漏洞复现】网康NS-ASG应用安全网关 index.php SQL注入漏洞(CVE-2024-2330)_网康科技 ns-asg 应用安全网关 sql注入漏洞
- 8SpringBoot+Vue+Uniapp搭建的Java版本的智能Ai对话系统_后台管理系统实现ai聊天对话
- 9玩客云nas基础玩法、Armbian、CasaOS+Alist+aria2下载_玩客云casaos 安装alist2
- 10Sequential Recommendation with Graph Neural Networks sigir 21
学习NodeMCU的GPIO_gpio.pulse.build
赞
踩
本文研究NodeMCU的GPIO的用法,主要是IO的电压范围和电流范围
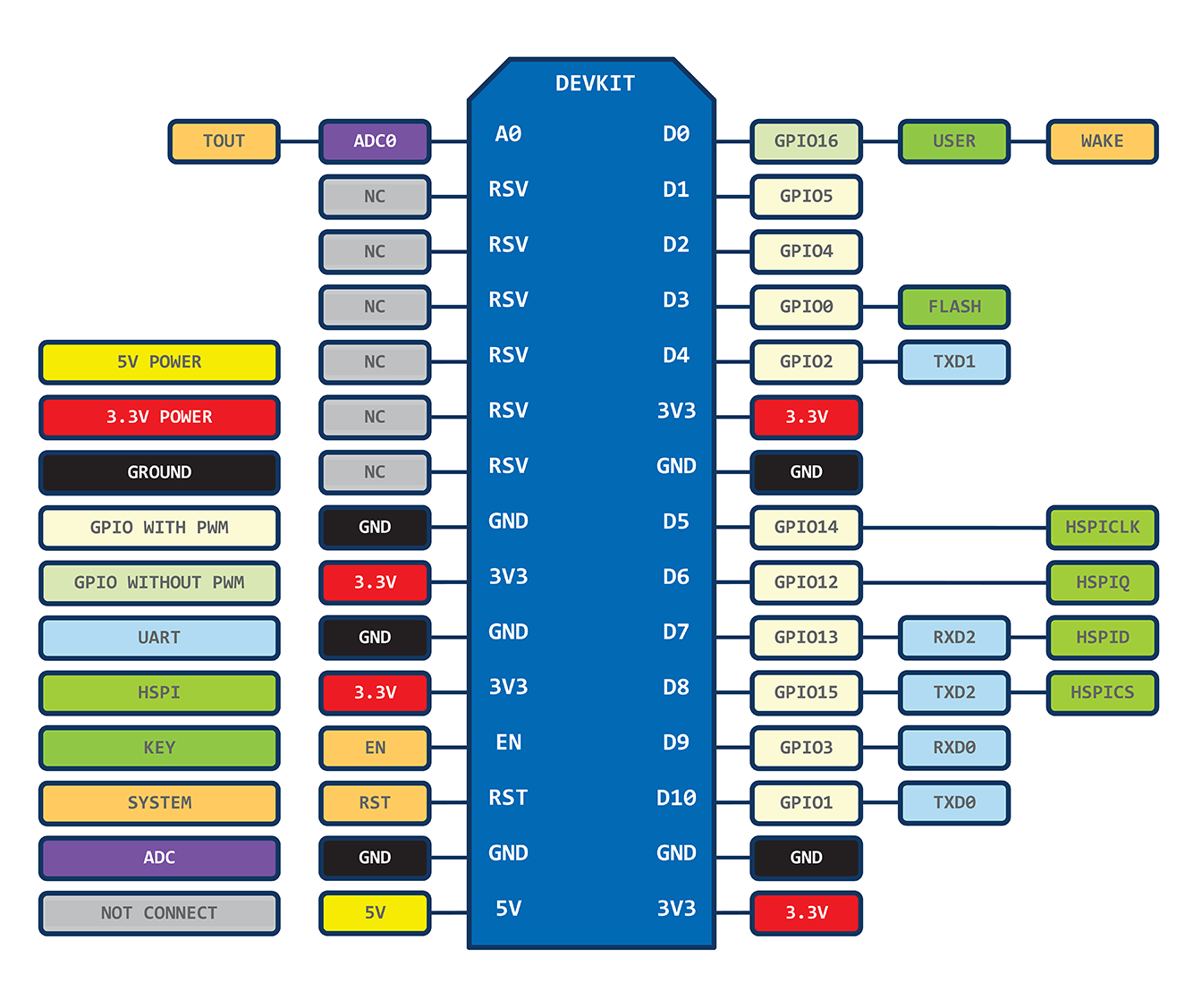
NodeMCU GPIO与ESP8266的映射
https://github.com/nodemcu/nodemcu-firmware/wiki/nodemcu_api_en
GPIONEW TABLE ( Build 20141219 and later)
new_gpio_map
| IO index | ESP8266 pin | IO index | ESP8266 pin |
|---|---|---|---|
| 0 [*] | GPIO16 | 7 | GPIO13 |
| 1 | GPIO4 | 8 | GPIO15 |
| 2 | GPIO5 | 9 | GPIO3 |
| 3 | GPIO0 | 10 | GPIO1 |
| 4 | GPIO2 | 11 | GPIO9 |
| 5 | GPIO14 | 12 | GPIO10 |
| 6 | GPIO12 |
** D0(GPIO16) can only be used asgpio read/write. no interrupt supported. no pwm/i2c/ow supported. *
NodeMCU的API
https://github.com/nodemcu/nodemcu-firmware/wiki/nodemcu_api_en
GPIO module
CONSTANT
gpio.OUTPUT, gpio.INPUT, gpio.INT, gpio.HIGH, gpio.LOW
gpio.mode()
Description
initialize pin to GPIO mode, set the pin in/out mode, internalpullup.
Syntax
gpio.mode(pin, mode, pullup)
Parameters
pin: 0~12, IO index
mode: gpio.OUTPUT or gpio.INPUT, orgpio.INT(interrupt mode) pullup: gpio.PULLUP or gpio.FLOAT, default:gpio.FLOAT.
Returns
nil
Example
-- set gpio 0 as output.
gpio.mode(0, gpio.OUTPUT)
See also
gpio.read()
Description
read pin value.
Syntax
gpio.read(pin)
Parameters
pin: 0~12, IO index
Returns
number:0 - low, 1 - high
Example
-- read value of gpio 0.
gpio.read(0)
See also
gpio.write()
Description
set pin value.
Syntax
gpio.write(pin)
Parameters
pin: 0~12, IO index
level: gpio.HIGH or gpio.LOW
Returns
nil
Example
-- set pin index 1 to GPIO mode, and set the pin to high.
pin=1
gpio.mode(pin, gpio.OUTPUT)
gpio.write(pin, gpio.HIGH)
See also
gpio.trig()
Description
set the interrupt callback function for pin.
Syntax
gpio.trig(pin, type, function(level))
Parameters
pin: 1~12, IO index, pin D0 does not supportInterrupt.
type: "up", "down", "both","low", "high", which represent rising edge,falling edge, both edge, low level, high level trig modeseparately.
function(level): callback function when triggered. Thegpio level is the param. Use previous callback function if undefinedhere.
Returns
nil
Example
-- use pin 0 as the input pulse width counter
pulse1 = 0
du = 0
gpio.mode(1,gpio.INT)
function pin1cb(level)
du = tmr.now() – pulse1
print(du)
pulse1 = tmr.now()
if level == 1 then gpio.trig(1, "down") else gpio.trig(1, "up") end
end
gpio.trig(1, "down",pin1cb)
See also
NodeMCU GPIO的驱动能力
https://nurdspace.nl/ESP8266#Power_Management
General PurposeIO
A total of up to 16 GPIO pins. The firmware can assign themdifferent functions. Each GPIO can be configured internal pullup /pulldown resistors available software registers sampled input,triggering edge or level CPU interrupt input, trigger level wake-upinterrupt input, open-drain or complementary push-pull outputdrivers, software register output source or sigma-delta PWM DAC.These pins are multiplexed with other functions, such as the maininterface, UART, SI, Bluetooth co-existence and so on.
Digital IO pins
Digital IO pad is two-way, three states. It includes a three-statecontrol input and output buffers. In addition, for low-poweroperation, IO can be set to hold state. For example, when we reducethe chip's power consumption, all the output enable signal can be setto maintain a low-power state. Hold function can be selectivelyimplanted IO in need. When the IO help internal and external circuitdriving, hold function can be used to hold last state. Hold functionto pin introduce some positive feedback. Therefore, the externaldrive pin must be stronger than the positive feedback. However, therequired driving force size is still small, in the 5uA of.
| Variables | Symbol | Min | Max | Units |
|---|---|---|---|---|
| Input Low Voltage | Vil | -0.3 | 0.25xV10 | V |
| Input High Voltage | Vih | 0.75xV10 | 3.6 | V |
| Input leakage current | IIL | - | 50 | nA |
| Output Low Voltage | VOL | - | 0.1xV10 | V |
| Output High Voltage | VOH | 0.8xV10 | - | V |
| Input pin capacitance | Cpad | - | 2 | pF |
| VDDIO | V10 | 1.7 | 3.6 | V |
| Current | Imax | - | 12 | mA |
| Temperature | Tamb | -20 | 100 | C |
All digital IO pins must add an overvoltage protection circuit(snap back circuit) between the pin and ground. Usually bounce (snapback) voltage is about 6V, while maintaining the voltage is 5.8V.This prevents excessive voltage and generating ESD. Diodes also avoidreverse voltage output devices.

