
- 1Android Studio 连接夜神模拟器的方法_android studio连接夜神模拟器
- 2【访问网络资源出错】不允许一个用户使用一个以上用户名与服务器或共享资源的多重连接
- 3git clone报错:remote: Support for password authentication was removed on August 13, 2021._get clone remote: support for password authenticat
- 4idea使用Spring Initializer创建springboot项目的坑【保姆级教学】
- 5【大模型专区】Text2Video-Zero—零样本文本到视频生成(上)
- 6神经网络深度学习梯度下降算法优化
- 7最新chatGPT镜像网站入口
- 8BigDecimal类的加减乘除(解决double计算精度问题)_bigdecimal怎么和double相乘
- 9Zookeeper Zab 协议解析——算法整体描述(一)_解析整体描述
- 10海外版抖音怎么下载?如何快速完成下载并注册TikTok账号?
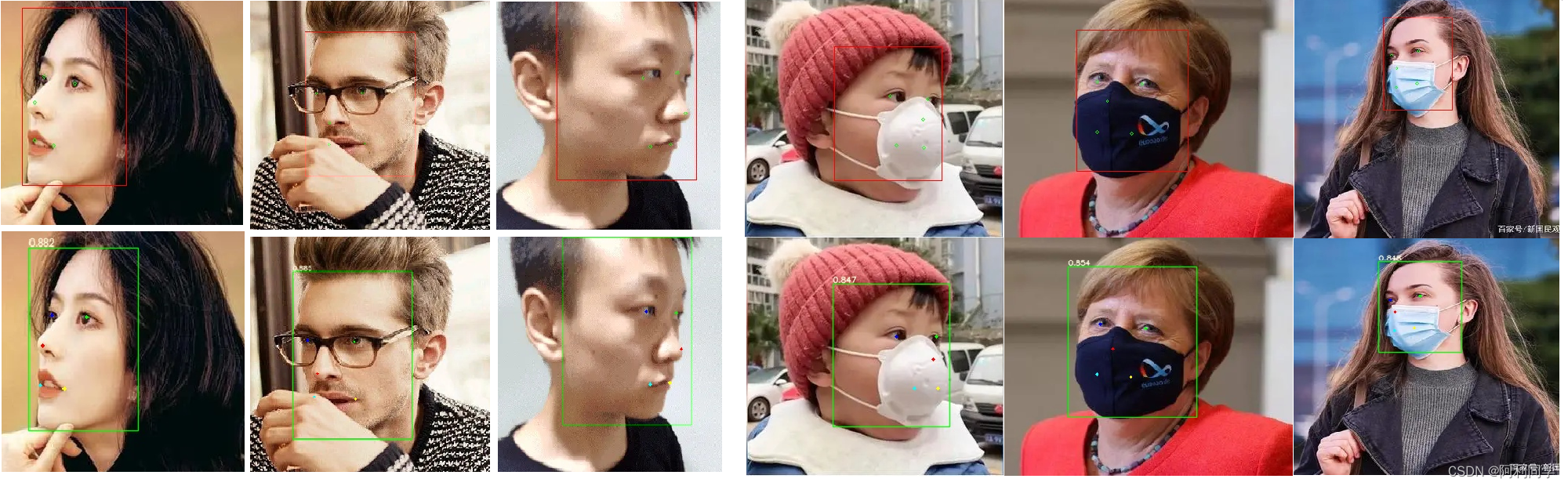
yolov8人脸识别-脸部关键点检测(代码+原理)_yolov8 人脸识别
赞
踩
YOLOv8 脸部识别是一个基于YOLOv8算法的人脸检测项目,旨在实现快速、准确地检测图像和视频中的人脸。该项目是对YOLOv8算法的扩展和优化,专门用于人脸检测任务。

YOLOv8是一种基于深度学习的目标检测算法,通过将目标检测问题转化为一个回归问题,可以实现实时的目标检测。YOLOv8 Face项目在YOLOv8的基础上进行了改进,使其更加适用于人脸检测。以下是YOLOv8 Face项目的一些特点和关键技术:
-
高准确性:YOLOv8
Face采用了一系列的优化策略,包括网络结构的设计、数据增强和训练技巧等,从而提高了模型的准确性。它能够精确地检测出各种不同姿态、光照和遮挡条件下的人脸。 -
实时性能:YOLOv8Face具有较高的实时性能,可以在实时图像和视频流中快速检测人脸。它采用了一种轻量级的网络结构和高效的推理算法,以实现实时的人脸检测。
-
多尺度检测:为了适应不同大小和尺度的人脸,YOLOv8 Face使用了多尺度检测技术。通过在不同尺度下进行检测,可以提高模型对小尺寸人脸的检测能力。
-
数据增强:YOLOv8 Face使用了各种数据增强技术,如随机裁剪、旋转和缩放等,以增加训练数据的多样性和丰富性。这有助于提高模型的泛化能力和鲁棒性。
-
高效推理:为了提高推理效率,YOLOv8 Face使用了一些优化技术,如模型压缩、量化和推理引擎的优化等。这使得模型可以在嵌入式设备和移动端实现快速的人脸检测。
代码运行
数据准备
-
下载WIDERFace数据集
-
从Google Drive下载注释文件
-
进入data文件夹
-
运行python3 train2yolo.py /path/to/original/widerface/train` [/path/to/save/widerface/train],将训练集转换为YOLOv5格式
-
运行
python3 val2yolo.py /path/to/original/widerface [/path/to/save/widerface/val],将验证集转换为YOLOv5格式
训练
- 运行
CUDA_VISIBLE_DEVICES="0,1,2,3" python3 train.py --data data/widerface.yaml --cfg models/yolov5s.yaml --weights 'pretrained models',进行训练
WIDERFace评估
- 进入
widerface_evaluate文件夹 - 运行
python3 evaluation.py,进行评估
demo代码
运行下列demo示例,可以帮助我们推理出结果!!!!!!1
import argparse
import time
from pathlib import Path
import cv2
import torch
import torch.backends.cudnn as cudnn
from numpy import random
from models.experimental import attempt_load
from utils.datasets import LoadStreams, LoadImages
from utils.general import check_img_size, non_max_suppression, apply_classifier, scale_coords, xyxy2xywh, \
strip_optimizer, set_logging, increment_path
from utils.plots import plot_one_box
from utils.torch_utils import select_device, load_classifier, time_synchronized
def detect(save_img=False):
source, weights, view_img, save_txt, imgsz = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size
print('weights: ', weights)
webcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(
('rtsp://', 'rtmp://', 'http://'))
# Directories
save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Initialize
set_logging()
device = select_device(opt.device)
half = device.type != 'cpu' # half precision only supported on CUDA
# Load model
model = attempt_load(weights, map_location=device) # load FP32 model
imgsz = check_img_size(imgsz, s=model.stride.max()) # check img_size
if half:
model.half() # to FP16
# Second-stage classifier
classify = False
if classify:
modelc = load_classifier(name='resnet101', n=2) # initialize
modelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()
# Set Dataloader
vid_path, vid_writer = None, None
if webcam:
view_img = True
cudnn.benchmark = True # set True to speed up constant image size inference
dataset = LoadStreams(source, img_size=imgsz)
else:
save_img = True
dataset = LoadImages(source, img_size=imgsz)
# Get names and colors
names = model.module.names if hasattr(model, 'module') else model.names
colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
# Run inference
t0 = time.time()
img = torch.zeros((1, 3, imgsz, imgsz), device=device) # init img
_ = model(img.half() if half else img) if device.type != 'cpu' else None # run once
for path, img, im0s, vid_cap in dataset:
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
# Inference
t1 = time_synchronized()
pred = model(img, augment=opt.augment)[0]
# Apply NMS
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)
t2 = time_synchronized()
# Apply Classifier
if classify:
pred = apply_classifier(pred, modelc, img, im0s)
# Process detections
for i, det in enumerate(pred): # detections per image
if webcam: # batch_size >= 1
p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
else:
p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
p = Path(p) # to Path
save_path = str(save_dir / p.name) # img.jpg
txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # img.txt
s += '%gx%g ' % img.shape[2:] # print string
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
if len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += f'{n} {names[int(c)]}s, ' # add to string
# Write results
for *xyxy, conf, cls in reversed(det):
if save_txt: # Write to file
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
line = (cls, *xywh, conf) if opt.save_conf else (cls, *xywh) # label format
with open(txt_path + '.txt', 'a') as f:
f.write(('%g ' * len(line)).rstrip() % line + '\n')
if save_img or view_img: # Add bbox to image
label = f'{names[int(cls)]} {conf:.2f}'
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)
# Print time (inference + NMS)
print(f'{s}Done. ({t2 - t1:.3f}s)')
# Stream results
if view_img:
cv2.imshow(str(p), im0)
if cv2.waitKey(1) == ord('q'): # q to quit
raise StopIteration
# Save results (image with detections)
if save_img:
if dataset.mode == 'image':
cv2.imwrite(save_path, im0)
else: # 'video'
if vid_path != save_path: # new video
vid_path = save_path
if isinstance(vid_writer, cv2.VideoWriter):
vid_writer.release() # release previous video writer
fourcc = 'mp4v' # output video codec
fps = vid_cap.get(cv2.CAP_PROP_FPS)
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*fourcc), fps, (w, h))
vid_writer.write(im0)
if save_txt or save_img:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
print(f"Results saved to {save_dir}{s}")
print(f'Done. ({time.time() - t0:.3f}s)')
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default='./weights/yolov5s.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='data/images', help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--update', action='store_true', help='update all models')
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
opt = parser.parse_args()
print(opt)
with torch.no_grad():
if opt.update: # update all models (to fix SourceChangeWarning)
for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']:
detect()
strip_optimizer(opt.weights)
else:
detect()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175

总之,YOLOv8 Face项目是一个基于YOLOv8算法的人脸检测项目,具有高准确性、实时性能和多尺度检测等特点。它可以广泛应用于人脸识别、人脸表情分析、人脸属性识别等领域,为人脸相关的应用提供强大的支持。

