
热门标签
热门文章
- 1常用的漏洞库_佩奇文库
- 2读懂 FastChat 大模型部署源码所需的异步编程基础_fastchat并发
- 3Anconda + CUDA + torch安装教程(python3.8)_cuda11.8 python3.8d
- 4网络协议安全:ARP欺骗原理解析,arpspoof实现ARP欺骗,ARP欺骗防御。
- 5电表远程抄表在配电房内的使用_:/ b-wifi远传电表配网教程来啦~wifi电表适用于分...;※※1jsyzngo7e8※※打
- 6Ticket Servers: Distributed Unique Primary Keys on the Cheap(经济高效的分布式ID生成方案) 翻译
- 7C++学习(48):多态_c++多态 run
- 8上百所大学计算机考研有变化!22计算机考研太难了!
- 9Github 2024-01-07 开源项目日报 Top10_mobile aloha开源文件
- 10手把手教你如何写一个FLink Connecter(一)_flink-connector
当前位置: article > 正文
ABB、FANUC机器人点位加速度用法
作者:小丑西瓜9 | 2024-04-13 05:38:18
赞
踩
ABB、FANUC机器人点位加速度用法
机器人在点位与点位之间的运动,会存在速度上的变化,加速度指令的添加可以减小机器人在运动中,由高速到低速间惯性的带来的影响,修正机器人的路径误差,让机器人的运动更加顺滑。
一、ABB机器人指令添加
ABB机器人加速度指令为ACCSET指令
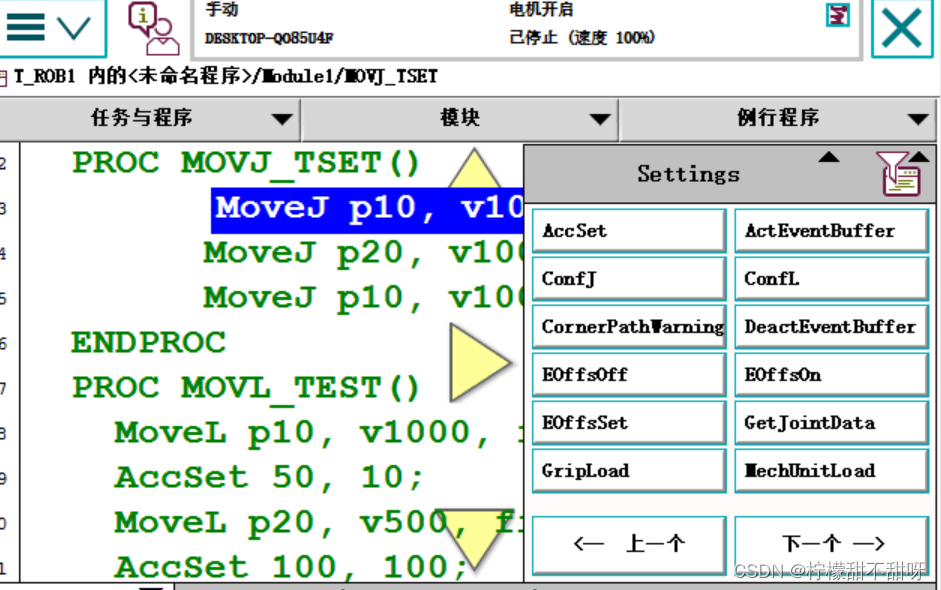
ACCSET指令中的第一个参数是设置加速度,第二个参数为设置减速度

将指令穿插添加在两个机器人两个运动指令之间

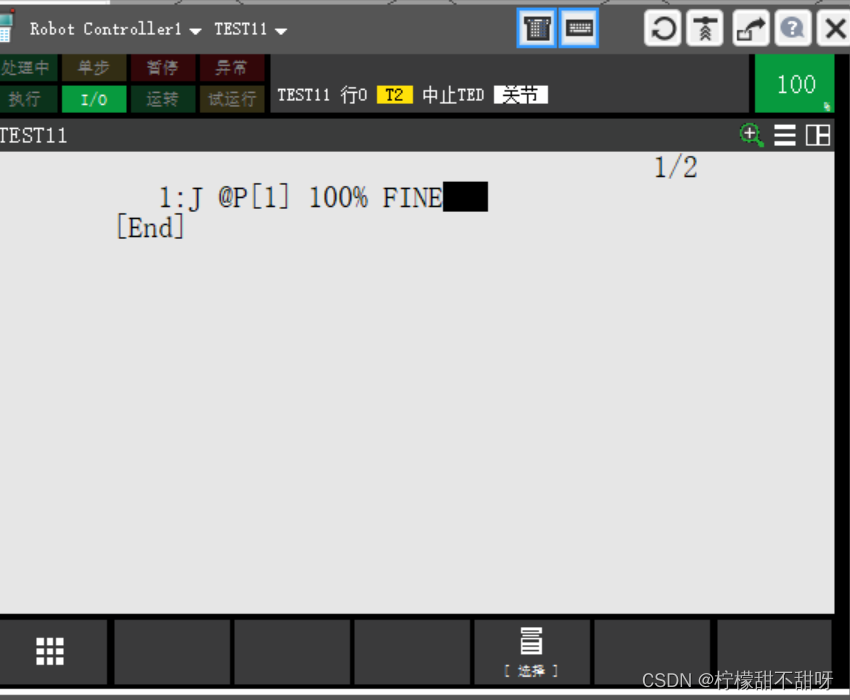
二、FANUC机器人指令添加
将光标移动至运动指令最后的空白栏位置,点击下方的选择
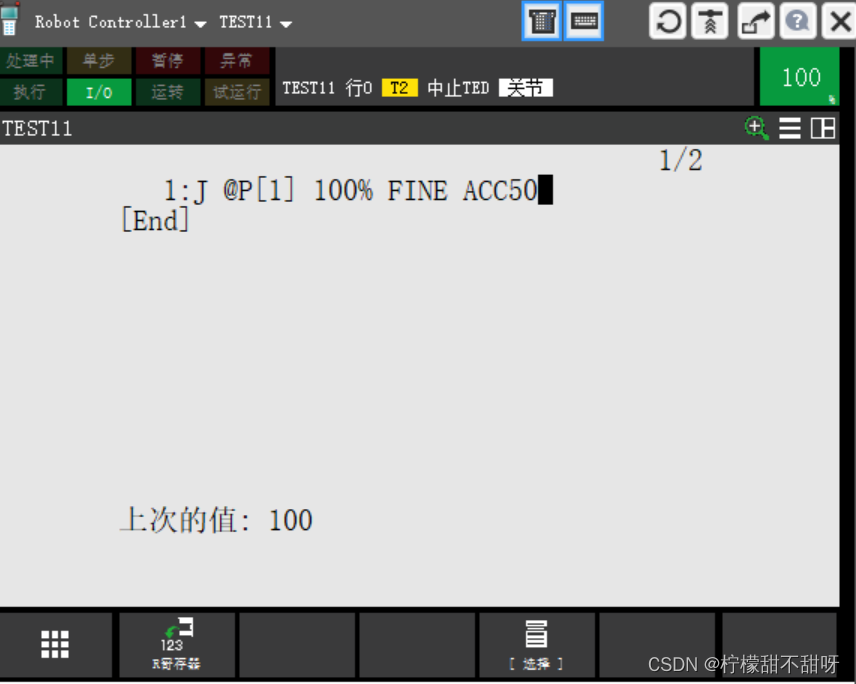
选择其中的ACC选项进行添加

输入需要修改的加减速的值,在单独的运动指令后
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop】
推荐阅读
相关标签

