
热门标签
热门文章
- 1XEE漏洞浅谈_xxe xee漏洞
- 2学会midjourney要多久?Midjourney超详细傻瓜式使用教程!5分钟学会Midjourney AI绘画!...
- 3JSP在页面用<%=调用声明函数时出现HTTP 500错误
- 4关于nltk安装出现的问题!渣渣版_cmudict.zip
- 5一切皆是映射:深度学习模型之间的知识迁移
- 6基于javaweb+mysql的springboot网上水果超市商城设计和实现(java+ssm+springboot+redis)_水果超市信息管理系统的设计与实现er图
- 7Hadoop 启动!
- 8STM32快速入门(串口传输之USART)
- 9关于ChatGPT前后今生学习笔记_chatgpt 使用前后的对比
- 10基于Uniapp与Spring Boot的课程打卡学习助手管理系统的设计与实现
当前位置: article > 正文
51单片机之智能小车(避障、跟随、循迹)_51单片机智能小车
作者:小丑西瓜9 | 2024-05-05 16:57:16
赞
踩
51单片机智能小车
目录
基本概述
硬件组成
电机模块L9110S、循迹模块、红外避障模块、超声波模块、测速模块、OLED屏、蓝牙模块、4G,模块、语音模块SU-03T
功能
蓝牙控制小车、WiFi控制小车、4G控制小车、小车的避障、跟随、循迹
关键字
单片机中一般都有两块存储区域,ROM和RAM,程序代码存储在ROM中,程序要用的变量存储在RAM中。而“code”的作用就是将其修饰过的变量存储在ROM中而非RAM。 在单片机中,RAM空间都比较小,是比较宝贵的,当存放在RAM中的数据过多时,会导致编译不成功。
- exturn:使用exturn关键字修饰的全局变量或函数,作用域不再局限本文件,其他文件同样能访问到这些变量或函数,跟static关键字恰恰相反。
- code:使用code关键字修饰的变量(一般是初始化后,值保持不变的变量)后会被存放到ROM区,从而节省RAM的空间。
模块介绍
电机模块L9110S
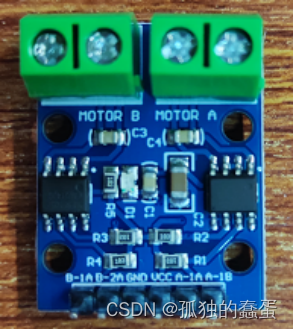
L0110S模块的A、B分别控制着两个电机,如果需要控制四个电机,则需要两个L0110S模块
- 当B-1A为高电平,B-2A为低电平时,电机反转或正转
- 当B-1A为低电平,B-2A为高电平时,电机正转反转
- 当B-1A为低电平,B-2A为低电平时,电机不转
- 电机的正转和反转与跟电机的接线不同而不同,注意自己调试
循迹模块(TCRT5000传感器)

- 当发射出的红外线没有被反射回来或被反射回来但强度不够大时,DO输出高电平,灯灭。 黑色吸收红外线,DO输出高电平,灯亮
- 当发射出的红外线被反射回来或被反射回来且强度足够大,DO输出低电平,灯亮。 白色反射红外线,DO输出低电平,灯亮
- 即黑色输出高电平,灯灭,白色输出低电平,灯亮
红外避障模块

- 当发射出的红外线没有被反射回来或被反射回来但强度不够大时,DO输出高电平,灯灭。没有障碍物
- 当发射出的红外线被反射回来,DO输出低电平,灯亮。有障碍物
- 即有障碍物输出低电平,灯亮,没有障碍物输出高电平,灯灭
测速模块

- 发射的红外线被物体遮挡时,输出高电平,发射的红外线没被物体遮挡时,输出低电平
- 有物体高电平,没物体低电平
- 当搭配小车测速盘,会形成下降沿(有遮挡高电平,没遮挡低电平)
小车
移动小车(控制电机转动,使小车前进、后退、左转、右转 )
- #include "reg52.h"
- #include <intrins.h>
-
- sbit left_con1A = P1^1;
- sbit left_con2A = P1^2;
- sbit right_con1A = P1^3;
- sbit right_con2A = P1^4;
-
- void Delay2000ms() //@11.0592MHz
- {
- unsigned char i, j, k;
-
- _nop_();
- i = 15;
- j = 2;
- k = 235;
- do
- {
- do
- {
- while (--k);
- } while (--j);
- } while (--i);
- }
-
- //两个电机反转,前进
- void goForward()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //两个电机正转,后退
- void goBack()
- {
- left_con1A = 0;
- left_con2A = 1;
-
- right_con1A = 0;
- right_con2A = 1;
- }
-
- //两个电机不转,停止
- void goStop()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //左电机不转,右电机反转,左转
- void goLeft()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //左电机反转,右电机不转,右转
- void goRight()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- void main()
- {
- while(1){
- goForward();
- Delay2000ms();
- goBack();
- Delay2000ms();
- goLeft();
- Delay2000ms();
- goRight();
- Delay2000ms();
- goStop();
- Delay2000ms();
- }
- }

遥控小车( 使用蓝牙模块,通过串口发送信息控制小车移动)
- #include "reg52.h"
- #include <intrins.h>
- #include <string.h>
-
- sfr AUXR = 0x8E;
-
- sbit left_con1A = P1^1;
- sbit left_con2A = P1^2;
- sbit right_con1A = P1^3;
- sbit right_con2A = P1^4;
- sbit led1 = P3^7;
- char mybuf[24] ;
-
- void Delay1000ms() //@11.0592MHz
- {
- unsigned char i, j, k;
-
- _nop_();
- i = 8;
- j = 1;
- k = 243;
- do
- {
- do
- {
- while (--k);
- } while (--j);
- } while (--i);
- }
-
- void uartInit()
- {
- AUXR = 0x01;
- PCON &= 0x7F; //配置波特率正常
- SCON = 0x50; //配置串口选择工作方式1,允许串口接收数据
-
- //配置定时器1为8位自动重装模式
- TMOD &= 0x0F;
- TMOD |= 0x20;
-
- //给定时器1,9600波特率初值
- TH1 = 0xFD; //定时器1初值
- TL1 = 0xFD; //定时器1重装值
-
- ET1 = 0; //不允许定时器1产生中断
- TR1 = 1; //开启定时器1
-
- EA = 1; //开启总中断
- ES = 1; //开启串口中断
-
- }
-
- void sendByte(char mydata)
- {
- SBUF = mydata; //向串口发送一帧信息
- while(!TI); //等待硬件置位
- TI = 0; //TI软件清0
- }
-
- void sendString(char *str)
- {
- while(*str != '\0'){
- sendByte(*str);
- str++;
- }
- }
-
- //两个电机反转,前进
- void goForward()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //两个电机正转,后退
- void goBack()
- {
- left_con1A = 0;
- left_con2A = 1;
-
- right_con1A = 0;
- right_con2A = 1;
- }
-
- //两个电机不转,停止
- void goStop()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //左电机不转,右电机反转,左转
- void goLeft()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //左电机反转,右电机不转,右转
- void goRight()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- void main()
- {
- uartInit();
- while(1){
- sendString("jiangxiaoya\r\n"); //发送心跳包,确保串口通信没有中断
- Delay1000ms();
- }
- }
-
-
- void myUart() interrupt 4
- {
- static int i = 0;
- char tmp;
-
- //接收数据后,RI硬件置位产生的中断
- if(RI){
- RI = 0; //RI软件清0
- //获取从pc端接收到的数据
- tmp = SBUF;
-
- if(tmp == 'f' || tmp == 'b' || tmp == 'l' || tmp == 'r' || tmp == 's'){
- i = 0;
- }
- mybuf[i] = tmp;
- i++;
-
- //forward
- if(mybuf[0] == 'f' && mybuf[1] == 'o'){
- goForward();
- memset(mybuf,'\0',24);
- }
-
- //forward
- if(mybuf[0] == 'b' && mybuf[1] == 'a'){
- goBack();
- memset(mybuf,'\0',24);
- }
-
- //left
- if(mybuf[0] == 'l' && mybuf[1] == 'e'){
- goLeft();
- memset(mybuf,'\0',24);
- }
- //right
- if(mybuf[0] == 'r' && mybuf[1] == 'i'){
- goRight();
- memset(mybuf,'\0',24);
- }
-
- //stop
- if(mybuf[0] == 's' && mybuf[1] == 't'){
- goStop();
- memset(mybuf,'\0',24);
- }
-
- if(i == 24){
- i = 0;
- }
-
- }
-
- //发送数据后,TI硬件置位产生的中断
- if(TI);
- }
调速小车(利用PWM波对电机进行调速)
- 利用定时器0软件模拟PWM波控制小车左轮速度,定时器1软件模拟PWM波控制小车右轮速度,通过控制轮子的速度来达到前进、停止、左转、右转
- 在20ms的过程中,部分时间让电机正转,剩下时间让电机停止不动就能改变电机获得的功率,从而改变电机速度。
- #include "reg52.h"
- #include <intrins.h>
- #include <string.h>
-
- sfr AUXR = 0x8E;
-
- sbit left_con1A = P1^1;
- sbit left_con2A = P1^2;
- sbit right_con1A = P1^3;
- sbit right_con2A = P1^4;
- sbit led1 = P3^7;
-
- char mybuf[24] ;
- char leftSpeed;
- char rightSpeed;
- int cntLeft = 0;
- int cntRight = 0;
-
- void Delay1000ms() //@11.0592MHz
- {
- unsigned char i, j, k;
-
- _nop_();
- i = 8;
- j = 1;
- k = 243;
- do
- {
- do
- {
- while (--k);
- } while (--j);
- } while (--i);
- }
-
- //左电机反转
- void goLeftForward()
- {
- left_con1A = 1;
- left_con2A = 0;
- }
-
- //左电机不转
- void goLeftStop()
- {
- left_con1A = 0;
- left_con2A = 0;
- }
-
- //右电机反转
- void goRightForward()
- {
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //右电机不转
- void goRightStop()
- {
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //前进
- void goForward()
- {
- leftSpeed = 18;
- rightSpeed = 20;
- }
-
- //停止
- void goStop()
- {
- leftSpeed = 0;
- rightSpeed = 0;
- }
-
- //左转
- void goLeft()
- {
- leftSpeed = 10;
- rightSpeed = 20;
- }
-
- //右转
- void goRight()
- {
- leftSpeed = 20;
- rightSpeed = 10;
- }
-
- void Timer0Init(void) //1毫秒@11.0592MHz
- {
- AUXR &= 0x7F; //定时器时钟12T模式
- TMOD &= 0xF0; //设置定时器模式
- TMOD |= 0x01; //设置定时器模式
- //定时器初值为1ms
- TL0 = 0x66;
- TH0 = 0xFC;
- TF0 = 0; //清除TF0标志
- TR0 = 1; //定时器0开始计时
- ET0 = 1;
- EA = 1;
- }
-
- void Timer1Init(void) //1毫秒@11.0592MHz
- {
- AUXR |= 0x40; //定时器时钟1T模式
- TMOD &= 0x0F; //设置定时器模式
- TMOD |= 0x10; //设置定时器模式
- //定时器初值为1ms
- TL1 = 0xCD;
- TH1 = 0xD4;
- TF1 = 0; //清除TF1标志
- TR1 = 1; //定时器1开始计时
- ET1 = 1;
- EA = 1;
- }
-
- void main()
- {
- Timer0Init();
- Timer1Init();
- while(1){
- Delay1000ms();
- goForward();
- Delay1000ms();
- goLeft();
- Delay1000ms();
- goRight();
- }
- }
-
- //定时器0的中断函数
- void Time0Handler() interrupt 1
- {
- cntLeft++;
- TL0 = 0x66;
- TH0 = 0xFC;
- if(cntLeft < leftSpeed)
- {
- goLeftForward();
- }else{
- goLeftStop();
- }
- if(cntLeft == 20){
- cntLeft = 0;
- }
- }
-
- void Time1Handler() interrupt 3
- {
- cntRight++;
- TL1 = 0x66;
- TH1 = 0xFC;
- if(cntRight < rightSpeed)
- {
- goRightForward();
- }else{
- goRightStop();
- }
- if(cntRight == 20){
- cntRight = 0;
- }
- }
循迹小车 (利用循迹模块进行黑白色的检测)
- #include "reg52.h"
- #include <intrins.h>
- #include <string.h>
-
- sfr AUXR = 0x8E;
-
- sbit left_con1A = P1^1;
- sbit left_con2A = P1^2;
- sbit right_con1A = P1^3;
- sbit right_con2A = P1^4;
- sbit tracingLeft = P1^5;
- sbit tracingRight = P1^6;
-
- char leftSpeed;
- char rightSpeed;
- int cntLeft = 0;
- int cntRight = 0;
-
- //左电机反转
- void goLeftForward()
- {
- left_con1A = 1;
- left_con2A = 0;
- }
-
- //左电机不转
- void goLeftStop()
- {
- left_con1A = 0;
- left_con2A = 0;
- }
-
- //右电机反转
- void goRightForward()
- {
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //右电机不转
- void goRightStop()
- {
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //前进
- void goForward()
- {
- leftSpeed = 17;
- rightSpeed = 20;
- }
-
- //停止
- void goStop()
- {
- leftSpeed = 0;
- rightSpeed = 0;
- }
-
- //左转
- void goLeft()
- {
- leftSpeed = 5;
- rightSpeed = 20;
- }
-
- //右转
- void goRight()
- {
- leftSpeed = 20;
- rightSpeed = 5;
- }
-
- void Timer0Init(void) //1毫秒@11.0592MHz
- {
- AUXR &= 0x7F; //定时器时钟12T模式
- TMOD &= 0xF0; //设置定时器模式
- TMOD |= 0x01; //设置定时器模式
- //定时器初值为1ms
- TL0 = 0x66;
- TH0 = 0xFC;
- TF0 = 0; //清除TF0标志
- TR0 = 1; //定时器0开始计时
- ET0 = 1;
- EA = 1;
- }
-
- void Timer1Init(void) //1毫秒@11.0592MHz
- {
- AUXR |= 0x40; //定时器时钟1T模式
- TMOD &= 0x0F; //设置定时器模式
- TMOD |= 0x10; //设置定时器模式
- //定时器初值为1ms
- TL1 = 0xCD;
- TH1 = 0xD4;
- TF1 = 0; //清除TF1标志
- TR1 = 1; //定时器1开始计时
- ET1 = 1;
- EA = 1;
- }
-
- void tracingMode()
- {
- if(tracingLeft == 0 && tracingRight == 0){ //
- goForward();
- }
-
- if(tracingLeft == 0 && tracingRight == 1){
- goRight();
- }
-
- if(tracingLeft == 1 && tracingRight == 0){
- goLeft();
- }
-
- if(tracingLeft == 1 && tracingRight == 1){
- goStop();
- }
- }
-
- void main()
- {
- Timer0Init();
- Timer1Init();
- while(1){
- tracingMode();
- }
- }
-
- //定时器0的中断函数
- void Time0Handler() interrupt 1
- {
- cntLeft++;
- TL0 = 0x66;
- TH0 = 0xFC;
- if(cntLeft < leftSpeed)
- {
- goLeftForward();
- }else{
- goLeftStop();
- }
- if(cntLeft == 20){
- cntLeft = 0;
- }
- }
-
- void Time1Handler() interrupt 3
- {
- cntRight++;
- TL1 = 0x66;
- TH1 = 0xFC;
- if(cntRight < rightSpeed)
- {
- goRightForward();
- }else{
- goRightStop();
- }
- if(cntRight == 20){
- cntRight = 0;
- }
- }
跟随小车(利用红外避障模块完成跟随行为)
- #include "reg52.h"
- #include <intrins.h>
- #include <string.h>
-
- sfr AUXR = 0x8E;
-
- sbit left_con1A = P1^1;
- sbit left_con2A = P1^2;
- sbit right_con1A = P1^3;
- sbit right_con2A = P1^4;
- sbit followLeft = P2^1;
- sbit followRight = P2^2;
-
- char leftSpeed;
- char rightSpeed;
- int cntLeft = 0;
- int cntRight = 0;
-
- //左电机反转
- void goLeftForward()
- {
- left_con1A = 1;
- left_con2A = 0;
- }
-
- //左电机不转
- void goLeftStop()
- {
- left_con1A = 0;
- left_con2A = 0;
- }
-
- //右电机反转
- void goRightForward()
- {
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //右电机不转
- void goRightStop()
- {
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //前进
- void goForward()
- {
- leftSpeed = 17;
- rightSpeed = 20;
- }
-
- //停止
- void goStop()
- {
- leftSpeed = 0;
- rightSpeed = 0;
- }
-
- //左转
- void goLeft()
- {
- leftSpeed = 8;
- rightSpeed = 20;
- }
-
- //右转
- void goRight()
- {
- leftSpeed = 20;
- rightSpeed = 10;
- }
-
- void Timer0Init(void) //1毫秒@11.0592MHz
- {
- AUXR &= 0x7F; //定时器时钟12T模式
- TMOD &= 0xF0; //设置定时器模式
- TMOD |= 0x01; //设置定时器模式
- //定时器初值为1ms
- TL0 = 0x66;
- TH0 = 0xFC;
- TF0 = 0; //清除TF0标志
- TR0 = 1; //定时器0开始计时
- ET0 = 1;
- EA = 1;
- }
-
- void Timer1Init(void) //1毫秒@11.0592MHz
- {
- AUXR |= 0x40; //定时器时钟1T模式
- TMOD &= 0x0F; //设置定时器模式
- TMOD |= 0x10; //设置定时器模式
- //定时器初值为1ms
- TL1 = 0xCD;
- TH1 = 0xD4;
- TF1 = 0; //清除TF1标志
- TR1 = 1; //定时器1开始计时
- ET1 = 1;
- EA = 1;
- }
-
- void followMode()
- {
- if(followLeft == 0 && followRight == 0){ //
- goForward();
- }
-
- if(followLeft == 0 && followRight == 1){
- goRight();
- }
-
- if(followLeft == 1 && followRight == 0){
- goLeft();
- }
-
- if(followLeft == 1 && followRight == 1){
- goStop();
- }
- }
-
- void main()
- {
- Timer0Init();
- Timer1Init();
- while(1){
- followMode();
- }
- }
-
- //定时器0的中断函数
- void Time0Handler() interrupt 1
- {
- cntLeft++;
- TL0 = 0x66;
- TH0 = 0xFC;
- if(cntLeft < leftSpeed)
- {
- goLeftForward();
- }else{
- goLeftStop();
- }
- if(cntLeft == 20){
- cntLeft = 0;
- }
- }
-
- void Time1Handler() interrupt 3
- {
- cntRight++;
- TL1 = 0x66;
- TH1 = 0xFC;
- if(cntRight < rightSpeed)
- {
- goRightForward();
- }else{
- goRightStop();
- }
- if(cntRight == 20){
- cntRight = 0;
- }
- }
避障小车(利用超声波测距完成避障行为)
- 利用定时器0软件模拟PWM波控制sg90舵机转动方向
- 利用定时器1和超声波不断测量前方距离
- #include "reg52.h"
- #include <intrins.h>
-
- sbit left_con1A = P1^1;
- sbit left_con2A = P1^2;
- sbit right_con1A = P1^3;
- sbit right_con2A = P1^4;
- sbit Trig = P2^3;
- sbit Echo = P2^4;
- sbit sg90 = P2^5;
-
- int angle;
- int angleBack;
- int cnt = 0;
-
- void Delay100ms() //@11.0592MHz
- {
- unsigned char i, j;
-
- i = 180;
- j = 73;
- do
- {
- while (--j);
- } while (--i);
- }
-
- void Delay300ms() //@11.0592MHz
- {
- unsigned char i, j, k;
-
- _nop_();
- i = 3;
- j = 26;
- k = 223;
- do
- {
- do
- {
- while (--k);
- } while (--j);
- } while (--i);
- }
-
- void Delay500ms() //@11.0592MHz
- {
- unsigned char i, j, k;
-
- _nop_();
- i = 4;
- j = 129;
- k = 119;
- do
- {
- do
- {
- while (--k);
- } while (--j);
- } while (--i);
- }
-
- void Delay10us() //@11.0592MHz
- {
- unsigned char i;
-
- i = 2;
- while (--i);
- }
-
- //两个电机反转,前进
- void goForward()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //两个电机正转,后退
- void goBack()
- {
- left_con1A = 0;
- left_con2A = 1;
-
- right_con1A = 0;
- right_con2A = 1;
- }
-
- //两个电机不转,停止
- void goStop()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //左电机不转,右电机反转,左转
- void goLeft()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //左电机反转,右电机不转,右转
- void goRight()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- void timer0Init()
- {
- //设置定时器0为16为计时模式
- TMOD &=0xF0;
- TMOD |=0x01;
-
- //设置定时器0定时时间为0.5ms
- TH0 = 0xFE;
- TL0 = 0x33;
-
- TR0 = 1; //定时器0开始计时
- TF0 = 0; //不执行定时器0爆表时导致的中断
-
- ET0 = 1; //定时器0中断开关
- EA = 1; //总中断开关
- }
-
- void timer1Init()
- {
- //设置定时器1为16为计时模式
- TMOD &= 0x0F;
- TMOD |= 0x10;
-
- TH1 = 0x00;
- TL1 = 0x00;
- }
-
- void ultrasonicStart()
- {
- Trig = 0;
- Trig = 1;
- Delay10us();
- Trig = 0;
- }
-
- double getDistance()
- {
- double time = 0;
-
- //定时器1清0
- TH1 = 0x00;
- TL1 = 0x00;
-
- ultrasonicStart();
-
- while(Echo == 0); //当Echo引脚从低电平跳到高电平时开启定时器1
- TR1 = 1;
-
- while(Echo == 1); //当Echo引脚从高电平跳到低电平时关闭定时器1
- TR1 = 0;
-
- time = (TH1*256 + TL1) * 1.085; //微秒
-
- return (time * 0.017);
- }
-
- void sg90Left()
- {
- angle = 5; //180°
- if(angleBack != angle){
- cnt = 0;
- }
- angleBack = angle;
- Delay100ms();
- }
-
- void sg90Middle()
- {
- angle = 3; //90°
- if(angleBack != angle){
- cnt = 0;
- }
- angleBack = angle;
- Delay100ms();
- }
-
- void sg90Right()
- {
- angle = 1; //0°
- if(angleBack != angle){
- cnt = 0;
- }
- angleBack = angle;
- Delay100ms();
- }
-
- void main()
- {
- double leftDistance;
- double rightDistance;
- double middleDistance;
-
- timer0Init();
- timer1Init();
-
- sg90Middle();
- Delay500ms();
-
- while(1){
- sg90Middle();
- Delay300ms();
- middleDistance = getDistance();
- if(middleDistance > 35){
- goForward();
- }else{
- goStop();
-
- sg90Left();
- Delay300ms();
- leftDistance = getDistance();
-
- sg90Middle();
- Delay300ms();
-
- sg90Right();
- Delay300ms();
- rightDistance = getDistance();
-
- if(leftDistance < 15 && rightDistance < 15){
- goBack();
- Delay500ms();
- goStop();
- }else{
-
- if(leftDistance > rightDistance){
- goLeft();
- Delay500ms();
- goStop();
- }
-
- if(rightDistance > leftDistance){
- goRight();
- Delay500ms();
- goStop();
- }
- }
- }
- }
- }
-
- //定时器0的中断函数
- void Time0Handler() interrupt 1
- {
-
- TH0 = 0xFE;
- TL0 = 0x33;
- cnt++;
- //控制占空比
- if(cnt < angle){
- sg90 = 1;
- }else{
- sg90 = 0;
- }
-
- if(cnt == 40){ //每个周期为20ms
- cnt = 0;
- sg90 = 1;
- }
- }
测速小车,使用OLED屏显示小车速度
- 轮子走一圈,经过一个周长,C = 2x3.14x半径= 3.14 x 直径(6.5cm),对应的转速码盘也转了一圈
- 码盘有20个格子,每经过一个格子,会遮挡(高电平)和不遮挡(低电平),即产生下降沿,一个下降沿就是走了 3.14 * 6.5 cm /20 = 1.0205CM
- 定时器可以设计成一秒,统计下降沿,一个下降沿就是1cm,假设一秒有80脉冲,那么就是80cm/s
- #include "reg52.h"
- #include <intrins.h>
- #include <string.h>
- #include <stdio.h>
-
- sfr AUXR = 0x8E;
-
- sbit left_con1A = P1^1;
- sbit left_con2A = P1^2;
- sbit right_con1A = P1^3;
- sbit right_con2A = P1^4;
- sbit Tachometer = P3^2; //测速模块产生下降沿,让外部中断0产生中断
- sbit scl = P2^6;
- sbit sda = P2^7;
-
- char mybuf[24];
-
- int signal;
- unsigned int cnt;
- unsigned int speedCnt = 0;
- unsigned int speed;
- char speedMsg[24];
-
- void Delay5us() //@11.0592MHz
- {
- }
-
- //两个电机反转,前进
- void goForward()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //两个电机正转,后退
- void goBack()
- {
- left_con1A = 0;
- left_con2A = 1;
-
- right_con1A = 0;
- right_con2A = 1;
- }
-
- //两个电机不转,停止
- void goStop()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //左电机不转,右电机反转,左转
- void goLeft()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //左电机反转,右电机不转,右转
- void goRight()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //串口初始化
- void uartInit()
- {
- AUXR = 0x01;
- PCON &= 0x7F; //配置波特率正常
- SCON = 0x50; //配置串口选择工作方式1,允许串口接收数据
-
- //配置定时器1为8位自动重装模式
- TMOD &= 0x0F;
- TMOD |= 0x20;
-
- //给定时器1,9600波特率初值
- TH1 = 0xFD; //定时器1初值
- TL1 = 0xFD; //定时器1重装值
-
- ET1 = 0; //不允许定时器1产生中断
- TR1 = 1; //开启定时器1
-
- EA = 1; //开启总中断
- ES = 1; //开启串口中断
-
- }
-
- //定时器0初始化,初值为1ms
- void Time0Init()
- {
- TMOD &=0xF0;
- TMOD |=0x01;
- //1ms
- TL0 = 0x66;
- TH0 = 0xFC;
- TR0 = 1;
- ET0 = 1;
- EA =1;
- }
-
- //外部中断0初始化
- void int0Init()
- {
- EX0 = 1;
- EA = 1;
- IT0 = 1; //下降沿触发外部中断0
- }
-
- //IIC起始信号
- void IIC_start()
- {
- sda = 0;
- scl = 1;
- sda = 1;
- Delay5us();
- sda = 0;
- Delay5us();
- scl = 0;
- }
-
- //IIC终止信号
- void IIC_stop()
- {
- scl = 0;
- sda = 0;
- scl = 1;
- Delay5us();
- sda = 1;
- Delay5us();
- sda = 0;
- }
-
- //IIC的ACK应答信号
- char IIC_ack()
- {
- char flag;
-
- scl = 0;
- sda = 1; //在时钟脉冲9期间释放数据线
- Delay5us(); //延时5微秒后,为读取sda数据做准备
-
- scl = 1;
- Delay5us();
- flag = sda; //读取数据线,0为应答
- Delay5us();
-
- scl = 0;
- Delay5us();
- return flag;
- }
-
- //IIC发送一个字节
- void IIC_sendByte(char myData)
- {
- int i;
- for ( i = 0; i < 8; i++){
- //发生数据翻转,选择即将发送的是0还是1
- scl = 0;
- sda = myData & 0x80; //获取需要发送字节的最高位到SDA
- Delay5us(); //数据建立时间
-
- //开始发送数据
- scl = 1;
- Delay5us(); //数据发送时间
-
- scl = 0; //发送完毕拉低,等待下1bit数据的传输
- Delay5us();
-
- myData = myData << 1;
- }
- }
-
- //OLED写入一条指令
- void oledWriteCmd(char writeCmd)
- {
- IIC_start();
- IIC_sendByte(0x78); //选择一个OLED屏,写模式
- IIC_ack();
- IIC_sendByte(0x00); //写入命令,D/C位为0
- IIC_ack();
- IIC_sendByte(writeCmd);
- IIC_ack();
- IIC_stop();
- }
-
- //OLED写入一个数据
- void oledWriteData(char writeData)
- {
- IIC_start();
- IIC_sendByte(0x78); //选择一个OLED屏,写模式
- IIC_ack();
- IIC_sendByte(0x40); //写入命令,D/C位为0
- IIC_ack();
- IIC_sendByte(writeData);
- IIC_ack();
- IIC_stop();
- }
-
- //OLCD初始化
- void oledInit()
- {
- oledWriteCmd(0xAE);
- oledWriteCmd(0x00);
- oledWriteCmd(0x10);
- oledWriteCmd(0x40);
- oledWriteCmd(0xB0);
- oledWriteCmd(0x81);
- oledWriteCmd(0xFF);
- oledWriteCmd(0xA1);
- oledWriteCmd(0xA6);
- oledWriteCmd(0xA8);
- oledWriteCmd(0x3F);
- oledWriteCmd(0xC8);
- oledWriteCmd(0xD3);
- oledWriteCmd(0x00);
- oledWriteCmd(0xD5);
- oledWriteCmd(0x80);
- oledWriteCmd(0xD8);
- oledWriteCmd(0x05);
- oledWriteCmd(0xD9);
- oledWriteCmd(0xF1);
- oledWriteCmd(0xDA);
- oledWriteCmd(0x12);
- oledWriteCmd(0xDB);
- oledWriteCmd(0x30);
- oledWriteCmd(0x8D);
- oledWriteCmd(0x14);
- oledWriteCmd(0xAF);
- }
-
- void olceClean()
- {
- int i,j;
- for(i=0;i<8;i++){
- oledWriteCmd(0xB0 + i); //选择PAGE
- //选择PAGE的第0列开始显示
- oledWriteCmd(0x00);
- oledWriteCmd(0x10);
- for(j = 0;j < 128; j++){
- oledWriteData(0); //写入字符0
- }
- }
- }
-
- //OLED的字符构造点阵
- const unsigned char code oledFont[]=
- {
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
- 0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
- 0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
- 0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
- 0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
- 0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
- 0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
- 0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
- 0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
- 0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
- 0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
- 0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
- 0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
- 0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
- 0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
- 0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
- 0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
- 0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
- 0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
- 0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
- 0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
- 0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
- 0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
- 0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
- 0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
- 0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
- 0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
- 0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
- 0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
- 0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
- 0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
- 0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
- 0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
- 0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
- 0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
- 0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
- 0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
- 0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
- 0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
- 0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
- 0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
- 0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
- 0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
- 0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
- 0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
- 0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
- 0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
- 0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
- 0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
- 0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
- 0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
- 0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
- 0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
- 0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
- 0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
- 0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
- 0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
- 0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
- 0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
- 0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
- 0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
- 0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
- 0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
- 0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
- 0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
- 0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
- 0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
- 0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
- 0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
- 0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
- 0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
- 0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
- 0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
- 0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
- 0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
- 0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
- 0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
- 0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
- 0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
- 0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
- 0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
- 0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
- 0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
- 0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
- 0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
- 0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
- 0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
- 0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
- };
-
- //OLED显示一个字符
- void oledShowByte(char rows,char columns,char oledByte)
- {
- unsigned int i;
-
- //显示字符的上半部分
- oledWriteCmd(0xb0+(rows*2-2)); //选择行
- //选择列
- oledWriteCmd(0x00+(columns&0x0f));
- oledWriteCmd(0x10+(columns>>4));
- //显示数据
- for(i=((oledByte-32)*16);i<((oledByte-32)*16+8);i++){
- oledWriteData(oledFont[i]);
- }
-
- //显示字符的上半部分
- oledWriteCmd(0xb0+(rows*2-1)); //选择行
- //选择列
- oledWriteCmd(0x00+(columns&0x0f));
- oledWriteCmd(0x10+(columns>>4));
- //显示数据
- for(i=((oledByte-32)*16+8);i<((oledByte-32)*16+8+8);i++){
- oledWriteData(oledFont[i]);
- }
- }
-
- //OLED显示一个字符串
- void oledShowString(char rows,char columns,char *str)
- {
- while(*str != '\0'){
- oledShowByte(rows,columns,*str);
- str++;
- columns += 8;
- }
- }
-
- void main()
- {
- uartInit();
- Time0Init();
- int0Init();
-
- oledInit();
- olceClean(); //清屏函数
- oledWriteCmd(0x20); //设置内存
- oledWriteCmd(0x02); //选择页寻址模式
-
- while(1){
- if(signal == 1){
- sprintf(speedMsg,"speed:%dcm/s ",speed);
- olceClean();
- oledShowString(2,5,speedMsg);
- signal = 0;
- }
- }
- }
-
- //定时器0产生的中断的处理函数
- void Time0Handle() interrupt 1
- {
- cnt++;
- TL0 = 0x66;
- TH0 = 0xFC;
- //每过一秒统计一次产生了多少次下降沿,让main函数向串口发送当前小车速度
- if(cnt == 1000){
- cnt = 0;
- signal = 1;
- speed = speedCnt;
- speedCnt = 0;
- }
- }
-
- //外部中断0产生的中断的处理函数
- void int0Handle() interrupt 0
- {
- speedCnt++; //每产生一个下降沿让标志位+1
- }
-
- //串口产生的中断的处理函数
- void myUart() interrupt 4
- {
- static int i = 0;
- char tmp;
-
- //接收数据后,RI硬件置位产生的中断
- if(RI){
- RI = 0; //RI软件清0
- //获取从pc端接收到的数据
- tmp = SBUF;
-
- if(tmp == 'f' || tmp == 'b' || tmp == 'l' || tmp == 'r' || tmp == 's'){
- i = 0;
- }
- mybuf[i] = tmp;
- i++;
-
- //forward
- if(mybuf[0] == 'f' && mybuf[1] == 'o'){
- goForward();
- memset(mybuf,'\0',24);
- }
-
- //forward
- if(mybuf[0] == 'b' && mybuf[1] == 'a'){
- goBack();
- memset(mybuf,'\0',24);
- }
-
- //left
- if(mybuf[0] == 'l' && mybuf[1] == 'e'){
- goLeft();
- memset(mybuf,'\0',24);
- }
- //right
- if(mybuf[0] == 'r' && mybuf[1] == 'i'){
- goRight();
- memset(mybuf,'\0',24);
- }
-
- //stop
- if(mybuf[0] == 's' && mybuf[1] == 't'){
- goStop();
- memset(mybuf,'\0',24);
- }
-
- if(i == 24){
- i = 0;
- }
-
- }
-
- //发送数据后,TI硬件置位产生的中断
- if(TI);
- }
语音控制小车,循迹、跟随、避障三种功能切换
- #include "reg52.h"
- #include <intrins.h>
-
- #define BZ 1
- #define XJ 2
- #define GS 3
-
- sfr AUXR = 0x8E;
-
- //sg90
- sbit sg90 = P2^5;
- //ultrasonic
- sbit Trig = P2^3;
- sbit Echo = P2^4;
- //oled
- sbit scl = P2^6;
- sbit sda = P2^7;
- //car
- sbit left_con1A = P1^1;
- sbit left_con2A = P1^2;
- sbit right_con1A = P1^3;
- sbit right_con2A = P1^4;
- //循迹
- sbit tracingLeft = P1^5;
- sbit tracingRight = P1^6;
- //跟随
- sbit followLeft = P2^1;
- sbit followRight = P2^2;
- //su-03t
- sbit A25 = P0^1;
- sbit A26 = P0^2;
- sbit A27 = P0^3;
-
- int angle;
- int angleBack;
- int cnt = 0;
-
- double leftDistance;
- double rightDistance;
- double middleDistance;
-
- //OLED的字符构造点阵
- const unsigned char code oledFont[]=
- {
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
- 0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
- 0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
- 0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
- 0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
- 0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
- 0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
- 0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
- 0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
- 0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
- 0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
- 0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
- 0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
- 0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
- 0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
- 0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
- 0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
- 0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
- 0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
- 0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
- 0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
- 0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
- 0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
- 0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
- 0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
- 0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
- 0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
- 0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
- 0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
- 0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
- 0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
- 0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
- 0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
- 0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
- 0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
- 0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
- 0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
- 0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
- 0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
- 0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
- 0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
- 0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
- 0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
- 0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
- 0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
- 0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
- 0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
- 0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
- 0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
- 0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
- 0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
- 0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
- 0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
- 0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
- 0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
- 0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
- 0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
- 0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
- 0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
- 0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
- 0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
- 0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
- 0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
- 0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
- 0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
- 0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
- 0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
- 0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
- 0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
- 0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
- 0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
- 0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
- 0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
- 0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
- 0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
- 0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
- 0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
- 0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
- 0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
- 0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
- 0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
- 0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
- 0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
- 0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
- 0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
- 0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
- 0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
- 0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
- };
-
- void Delay5us() //@11.0592MHz
- {
- }
-
- void Delay10us() //@11.0592MHz
- {
- unsigned char i;
-
- i = 2;
- while (--i);
- }
-
- void Delay100ms() //@11.0592MHz
- {
- unsigned char i, j;
-
- i = 180;
- j = 73;
- do
- {
- while (--j);
- } while (--i);
- }
-
- void Delay300ms() //@11.0592MHz
- {
- unsigned char i, j, k;
-
- _nop_();
- i = 3;
- j = 26;
- k = 223;
- do
- {
- do
- {
- while (--k);
- } while (--j);
- } while (--i);
- }
-
- void Delay500ms() //@11.0592MHz
- {
- unsigned char i, j, k;
-
- _nop_();
- i = 4;
- j = 129;
- k = 119;
- do
- {
- do
- {
- while (--k);
- } while (--j);
- } while (--i);
- }
-
- //sg90
- void timer0Init()
- {
- //设置定时器0为16为计时模式
- TMOD &=0xF0;
- TMOD |=0x01;
-
- //设置定时器0定时时间为0.5ms
- TH0 = 0xFE;
- TL0 = 0x33;
-
- TR0 = 1; //定时器0开始计时
- TF0 = 0; //不执行定时器0爆表时导致的中断
-
- ET0 = 1; //定时器0中断开关
- EA = 1; //总中断开关
- }
-
- void sg90Left()
- {
- angle = 5; //180°
- if(angleBack != angle){
- cnt = 0;
- }
- angleBack = angle;
- Delay100ms();
- }
-
- void sg90Middle()
- {
- angle = 3; //90°
- if(angleBack != angle){
- cnt = 0;
- }
- angleBack = angle;
- Delay100ms();
- }
-
- void sg90Right()
- {
- angle = 1; //0°
- if(angleBack != angle){
- cnt = 0;
- }
- angleBack = angle;
- Delay100ms();
- }
-
- //ultrasonic
- void timer1Init()
- {
- //设置定时器1为16为计时模式
- TMOD &= 0x0F;
- TMOD |= 0x10;
-
- TH1 = 0x00;
- TL1 = 0x00;
- }
-
- void ultrasonicStart()
- {
- Trig = 0;
- Trig = 1;
- Delay10us();
- Trig = 0;
- }
-
- double getDistance()
- {
- double time = 0;
-
- //定时器1清0
- TH1 = 0x00;
- TL1 = 0x00;
-
- ultrasonicStart();
-
- while(Echo == 0); //当Echo引脚从低电平跳到高电平时开启定时器1
- TR1 = 1;
-
- while(Echo == 1); //当Echo引脚从高电平跳到低电平时关闭定时器1
- TR1 = 0;
-
- time = (TH1*256 + TL1) * 1.085; //微秒
-
- return (time * 0.017);
- }
-
- //oled
- //IIC起始信号
- void IIC_start()
- {
- sda = 0;
- scl = 1;
- sda = 1;
- Delay5us();
- sda = 0;
- Delay5us();
- scl = 0;
- }
-
- //IIC终止信号
- void IIC_stop()
- {
- scl = 0;
- sda = 0;
- scl = 1;
- Delay5us();
- sda = 1;
- Delay5us();
- sda = 0;
- }
-
- //IIC的ACK应答信号
- char IIC_ack()
- {
- char flag;
-
- scl = 0;
- sda = 1; //在时钟脉冲9期间释放数据线
- Delay5us(); //延时5微秒后,为读取sda数据做准备
-
- scl = 1;
- Delay5us();
- flag = sda; //读取数据线,0为应答
- Delay5us();
-
- scl = 0;
- Delay5us();
- return flag;
- }
-
- //IIC发送一个字节
- void IIC_sendByte(char myData)
- {
- int i;
- for ( i = 0; i < 8; i++){
- //发生数据翻转,选择即将发送的是0还是1
- scl = 0;
- sda = myData & 0x80; //获取需要发送字节的最高位到SDA
- Delay5us(); //数据建立时间
-
- //开始发送数据
- scl = 1;
- Delay5us(); //数据发送时间
-
- scl = 0; //发送完毕拉低,等待下1bit数据的传输
- Delay5us();
-
- myData = myData << 1;
- }
- }
-
- //OLED写入一条指令
- void oledWriteCmd(char writeCmd)
- {
- IIC_start();
- IIC_sendByte(0x78); //选择一个OLED屏,写模式
- IIC_ack();
- IIC_sendByte(0x00); //写入命令,D/C位为0
- IIC_ack();
- IIC_sendByte(writeCmd);
- IIC_ack();
- IIC_stop();
- }
-
- //OLED写入一个数据
- void oledWriteData(char writeData)
- {
- IIC_start();
- IIC_sendByte(0x78); //选择一个OLED屏,写模式
- IIC_ack();
- IIC_sendByte(0x40); //写入命令,D/C位为0
- IIC_ack();
- IIC_sendByte(writeData);
- IIC_ack();
- IIC_stop();
- }
-
- //OLCD初始化
- void oledInit()
- {
- oledWriteCmd(0xAE);
- oledWriteCmd(0x00);
- oledWriteCmd(0x10);
- oledWriteCmd(0x40);
- oledWriteCmd(0xB0);
- oledWriteCmd(0x81);
- oledWriteCmd(0xFF);
- oledWriteCmd(0xA1);
- oledWriteCmd(0xA6);
- oledWriteCmd(0xA8);
- oledWriteCmd(0x3F);
- oledWriteCmd(0xC8);
- oledWriteCmd(0xD3);
- oledWriteCmd(0x00);
- oledWriteCmd(0xD5);
- oledWriteCmd(0x80);
- oledWriteCmd(0xD8);
- oledWriteCmd(0x05);
- oledWriteCmd(0xD9);
- oledWriteCmd(0xF1);
- oledWriteCmd(0xDA);
- oledWriteCmd(0x12);
- oledWriteCmd(0xDB);
- oledWriteCmd(0x30);
- oledWriteCmd(0x8D);
- oledWriteCmd(0x14);
- oledWriteCmd(0xAF);
- }
-
- //OLED清屏函数
- void olceClean()
- {
- int i,j;
- for(i=0;i<8;i++){
- oledWriteCmd(0xB0 + i); //选择PAGE
- //选择PAGE的第0列开始显示
- oledWriteCmd(0x00);
- oledWriteCmd(0x10);
- for(j = 0;j < 128; j++){
- oledWriteData(0); //写入字符0
- }
- }
- }
-
- //OLED显示一个字符
- void oledShowByte(char rows,char columns,char oledByte)
- {
- unsigned int i;
-
- //显示字符的上半部分
- oledWriteCmd(0xb0+(rows*2-2)); //选择行
- //选择列
- oledWriteCmd(0x00+(columns&0x0f));
- oledWriteCmd(0x10+(columns>>4));
- //显示数据
- for(i=((oledByte-32)*16);i<((oledByte-32)*16+8);i++){
- oledWriteData(oledFont[i]);
- }
-
- //显示字符的上半部分
- oledWriteCmd(0xb0+(rows*2-1)); //选择行
- //选择列
- oledWriteCmd(0x00+(columns&0x0f));
- oledWriteCmd(0x10+(columns>>4));
- //显示数据
- for(i=((oledByte-32)*16+8);i<((oledByte-32)*16+8+8);i++){
- oledWriteData(oledFont[i]);
- }
- }
-
- //OLED显示一个字符串
- void oledShowString(char rows,char columns,char *str)
- {
- while(*str != '\0'){
- oledShowByte(rows,columns,*str);
- str++;
- columns += 8;
- }
- }
-
- //car
- //两个电机反转,前进
- void goForward()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //两个电机正转,后退
- void goBack()
- {
- left_con1A = 0;
- left_con2A = 1;
-
- right_con1A = 0;
- right_con2A = 1;
- }
-
- //两个电机不转,停止
- void goStop()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //左电机不转,右电机反转,左转
- void goLeft()
- {
- left_con1A = 0;
- left_con2A = 0;
-
- right_con1A = 1;
- right_con2A = 0;
- }
-
- //左电机反转,右电机不转,右转
- void goRight()
- {
- left_con1A = 1;
- left_con2A = 0;
-
- right_con1A = 0;
- right_con2A = 0;
- }
-
- //循迹模式
- void tracingMode()
- {
- if(tracingLeft == 0 && tracingRight == 0){
- goForward();
- }
-
- if(tracingLeft == 0 && tracingRight == 1){
- goRight();
- }
-
- if(tracingLeft == 1 && tracingRight == 0){
- goLeft();
- }
-
- if(tracingLeft == 1 && tracingRight == 1){
- goStop();
- }
- }
-
- //跟随模式
- void followMode()
- {
- if(followLeft == 0 && followRight == 0){ //
- goForward();
- }
-
- if(followLeft == 0 && followRight == 1){
- goRight();
- }
-
- if(followLeft == 1 && followRight == 0){
- goLeft();
- }
-
- if(followLeft == 1 && followRight == 1){
- goStop();
- }
- }
-
- //避障模式
- void avoidMode()
- {
- sg90Middle();
- Delay300ms();
- middleDistance = getDistance();
- if(middleDistance > 35){
- goForward();
- }else{
- goStop();
-
- sg90Left();
- Delay300ms();
- leftDistance = getDistance();
-
- sg90Middle();
- Delay300ms();
-
- sg90Right();
- Delay300ms();
- rightDistance = getDistance();
-
- if(leftDistance < 15 && rightDistance < 15){
- goBack();
- Delay500ms();
- goStop();
- }else{
-
- if(leftDistance > rightDistance){
- goLeft();
- Delay500ms();
- goStop();
- }
-
- if(rightDistance > leftDistance){
- goRight();
- Delay500ms();
- goStop();
- }
- }
- }
- }
-
- void main()
- {
- int mark = 0;
- timer0Init();
- timer1Init();
- sg90Middle();
- Delay500ms();
- oledInit();
- olceClean();
- oledShowString(2,5,"haozige");
- while(1){
-
- if(A25 == 0 && A26 == 1 && A27 == 1){
- if(mark != GS){
- olceClean();
- oledShowString(2,5,"genshuai");
- }
- mark = GS;
- followMode();
- }
-
-
- if(A25 == 1 && A26 == 0 && A27 == 1){
- if(mark != BZ){
- olceClean();
- oledShowString(2,5,"bizhang");
- }
- mark = BZ;
- avoidMode();
- }
-
- if(A25 == 1 && A26 == 1 && A27 == 0){
- if(mark != XJ){
- olceClean();
- oledShowString(2,5,"xunji");
- }
- mark = XJ;
- tracingMode();
- }
-
- }
- }
-
- //定时器0的中断函数
- void Time0Handler() interrupt 1
- {
-
- TH0 = 0xFE;
- TL0 = 0x33;
- cnt++;
- //控制占空比
- if(cnt < angle){
- sg90 = 1;
- }else{
- sg90 = 0;
- }
-
- if(cnt == 40){ //每个周期为20ms
- cnt = 0;
- sg90 = 1;
- }
- }
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/539908
推荐阅读
相关标签

