
- 1springboot整合dubbo3 及其中遇到的坑_springboot3 dubbo
- 2肺癌新易感位点的发现及多基因遗传评分在肺癌风险预测中的应用--基于中国超大型前瞻性队列研究_肺癌prs
- 3AI重复率怎么检测的?本科论文aigc检测率为多少?_aigc论文检测多少算正常
- 4微软应用商店下载应用教程(附带power shell命令)_windows 命令行从商店下载
- 5异常检测(Anomaly Detection)
- 6kafka总结
- 7【计算机毕设文章】私人健身和教练预约管理系统_bruce shive.research direction in object-oriented
- 8CentOS7 YUM安装RabbitMQ3.8.19高可用集群_rabbitmq3.8.19延迟插件安装下载
- 9JAVA JDK下载安装环境变量配置与安装视频教程2022年(超详细)_jdk环境变量视频
- 10Qt5.15.2安装_qt5.15.2安装教程
双臂二指魔方机器人的制作(一)--总体设计_魔方机器人制作需要那些知识
赞
踩
本文素材来源于广西大学 机械工程学院
作者:孙尹同 黄祖杰
指导老师:李俚
魔方,又名鲁比克方块,最早是由匈牙利布达佩斯建筑学院厄尔诺.鲁比克教授于1974年发明的机械益智玩具。魔方拥有竞速、盲拧、单拧等多种玩法,风靡程度至今未衰,每年都会举办大小赛事,是最受欢迎的智力游戏之一。
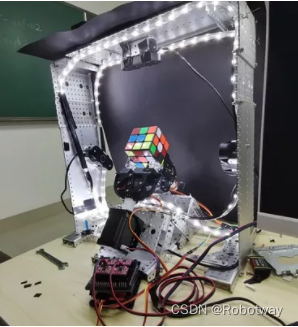
为此,我们应用探索者Rob-GS01的箱子搭建了一款可以自主还原魔方的娱乐型机器人。如果在居家拧魔方的过程中无法还原魔方,只需交给它便能在30s内完成还原。自认为是魔方高手的同学也可以人工手拧与机器人复原进行竞速比赛。 此作品占地体积小,为40x40x40cm,适用于安放在家庭的任何角落。供电仅需一台笔记本电脑外加一个固定电源。总体成本控制在人民币1000元以内,性价比高。 本作品原理可分为三个模块进行介绍,分别是机械结构、视觉识别和算法控制。
基础零件(铝制零件、舵机、步进电机、单片机控制板等)来自于探索者Rob-GS01机器人实验箱。Basra控制板,Bigfish扩展板 和 SH-ST步进扩展板用于执行算法,控制并 驱动舵机 和步进电机;搭建外部框架安放四个小型摄像头进行视觉识别。

视觉识别图像处理采用4个摄像头对魔方六个面进行颜色识别编码,本作品主要利用Open CV函数库对采集的图像进行选择、透射变换、色彩空间转换等操作后,通过kmeans聚类算法进行颜色分割,以减少外部噪声干扰,从而求出魔方不同情况下色块对应的编码。
接下来的任务交给算法控制;视觉识别给出的数组先传递给Kociemba二阶段算法,Kociemba二阶段算法通过该数组得到魔方每个面的情况,给出一个20~30步的解决方案,通过串口通讯传递给单片机。单片机内已通过机械手旋转方向变换,步进电机和舵机的转速参数等写好了拧魔方的具体程序。收到电脑通过串口发出的指令后立即执行,操作机械手使魔方成功还原。
本作品是一个融合了机器人视觉、图像处理技术、机器人控制技术和魔方还原算法等多学科知识的机电一体化设备。
双臂二指魔方机器人--总体设计
魔方机器人是机器人智能化的一种新体现,魔方机器人的机械结构设计以及还原算法的分析编译是该机器人的核心内容。
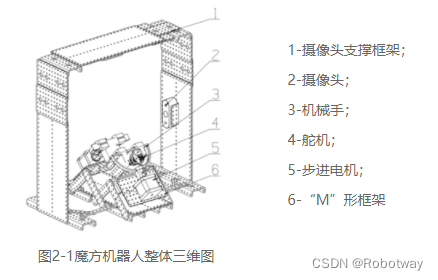
本文的双臂二指魔方机器人是基于探索者Rob-GS01、Open CV 来设计与制作,由本体机械结构、控制系统、外围数据采集装备(四方位摄像头、支架)组成,整体结构如图 2-1 所示。它涵盖了魔方颜色识别,还原步骤算法解析计算,机械手夹取系统以及机械臂旋转系统。主体机械结构由2只机械臂组成,通过“M”形框架搭建固定在支撑架上,在2组舵机和步进电动机的分别驱动下,实现机械臂的转动以及夹爪的夹取运动,从而实现魔方面的转动。
1.机械本体构成
主体机械结构由探索者 Rob-GS01 箱子中的铝制零件拼接。其他配件包括:3D 打印的二指机械手*2、42 步进电机*2、舵机*2、摄像头*4、杜邦线、补光灯、胶带(若干)。
2.控制系统构成
控制系统的上位机(电脑),用于连接摄像头进行视觉识别、图像处理、魔方还原方案的制定,确定魔方还原方案后,通过 USB 串口通讯将还原魔方的指令发送到下位机(单片机控制板)。下位机收到指令后即驱动机械手完成复原魔方的操作。
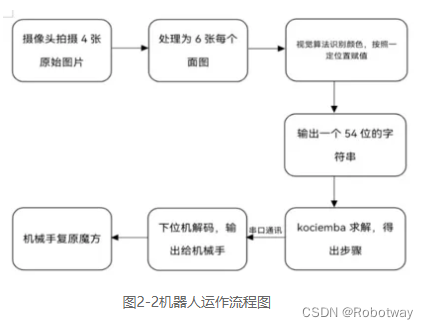
下位机所用的单片机控制板由探索者 Rob-GS01 箱子中的 Basra 控制板、Big fish 扩展板、SH-ST扩展板三块单板拼接而成,其中 Basra 控制板用于搭载程序,同时串口通讯接收电脑的指令,Big fish 扩展板用于连接舵机和传感器,SH-ST 扩展板连接锂电池供电,驱动步进电机使 机械手旋转。整机的操作流程如图2-2 所示。
3.外围数据采集装备
数据采集由四个方位的摄像头来完成,分别位于被夹持魔方的上、下、左、右。固定摄像机的框架采用探索者 Rob-GS01中的铝制零件拼接而成。
双臂二指魔方机器人--机械结构
目前魔方机器人的机械结构主要有类人双臂式和四轴旋转式2种类型,相比较之下,类人双臂式的魔方放机器人结构更为简单,控制系统协调度更高,成本更低。该魔方机器人复原过程需要2只机械手同时工作,相互配合运动来完成相应复原转动的动作。为使机械手能够互相独立工作,做回转运动时互不干扰,机械手需满足手臂的中心线在同一平面且垂直,故机械臂采用双臂交叉正交结构,分别在魔方的两侧斜45°向上,从两侧支撑魔方。两机械手通过“M”形框架装夹固定在与水平桌面形成45°夹角的平面上,完成机械手臂以及夹爪的相应动作。
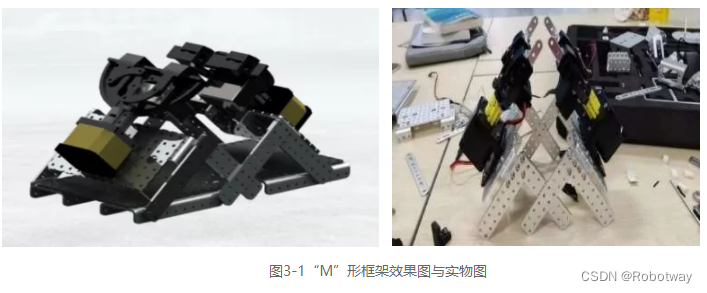
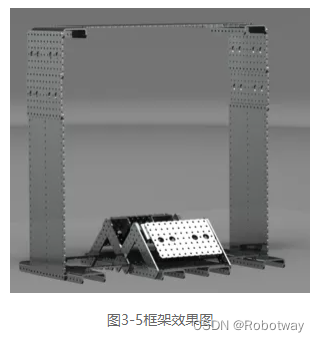
1.“M”形框架设计
框架决定了机械手配合的平稳性和协调性,因此在设计的过程中应用三角形的稳定性,决定将机械手对位斜 45°放置。安置机械手、步进电机、舵机的框架呈“M”形。这样的框架既能合理分担承重,又不会因机械手动作的振动而产生位移,相对稳定。
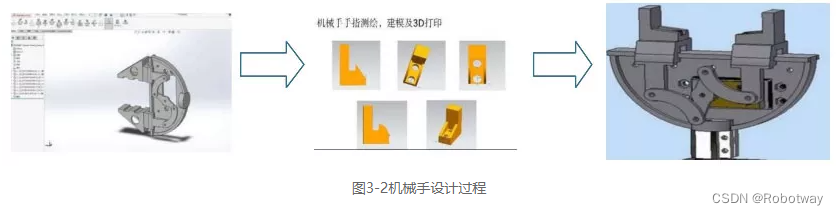
2.机械手结构设计
对于抓取魔方的机械手设计,传统的魔方还原机器人多选用五指结构,但其结构复杂,稳定性差,本文设计的魔方还原机器人采用二指结构,力量调节更方便,结构更简单,自身转动惯量较小,质量分布较均匀,更适合一边转动一边抓取。
如下图为本文设计的二指机械手。由于两个指尖的形状和材质会严重影响魔方还原速度,我们对机械手指采用ug软件进行了多版设计和 3D 打印,并确定了最终方案,机械手指内侧设还计了防滑纹,从两侧支撑魔方,从而减小因魔方自重在转动过程中产生的误差,保证机械手在夹取和松开时,魔方的准确位置。
3.器件的选型
根据设计要求,步进电机经联轴器连接机械手使其随输出轴顺、逆时针180°旋转;舵机顺、逆时针180°旋转带动一字摆臂使机械手手指松开或夹紧;具体的器件选型如下:
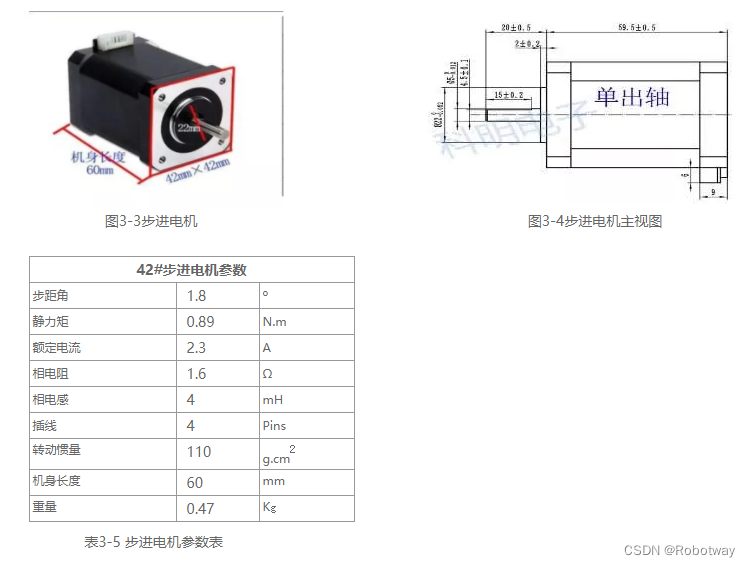
3.1步进电机的选型
步进电机相对于其它控制用途电机的最大区别是,它接收数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,它本身就是一个完成数字模式转化的执行元件。机器人采用步进电机链接联轴器驱动机械手旋转。步进电机参数的选择主要考虑该机构框架尺寸以及步距角的大小。
3.2 舵机的选型

3.3整体框架的零件
本文设计的魔方机器人框架搭建所需的零件主要采用探索者Rob-01提供的零件,然后根据所设计的结构进行组装搭建。

3.4单片机控制板
单片机控制板、扩展板如图所示: 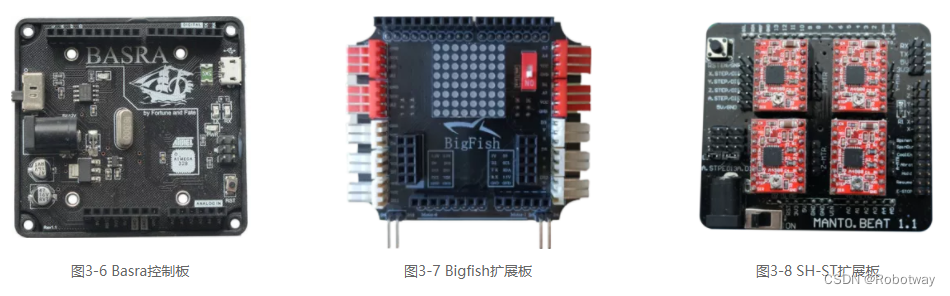
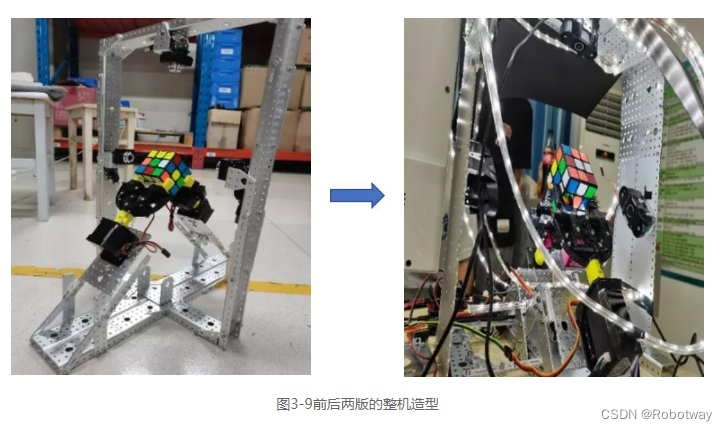
3.5结构制作过程
前后的整体结构共设计了两版。如下左图为第一版,右图为第二版。由于第一版结构对两只机械手的平衡配合产生了较大影响,所选取的探索者配套摄像头精度也有瑕疵。最终采用了辅助方案第二版。两只机械手配合灵活,执行力较强。
关于双臂二指魔方机器人的详细内容可参考双臂二指魔方机器人
-----------------------------------------------未完待续---------------------------------------------------

