
热门标签
当前位置: article > 正文
STM32F103ZET6【标准库函数开发】------05.通用定时器TIM4四个通道输出PWM信号_stm32f103zet6的pd12、13重映射为定时器4初始化
作者:小丑西瓜9 | 2024-05-13 21:57:32
赞
踩
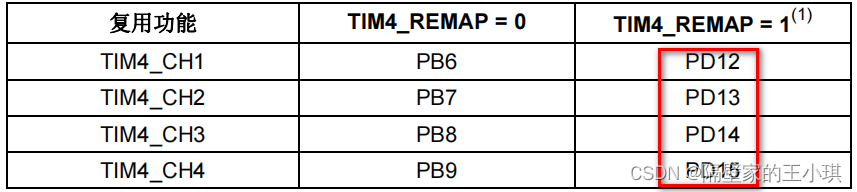
stm32f103zet6的pd12、13重映射为定时器4初始化

STM32有四个通用定时器,现在介绍TIM4输出4路PWM的方法
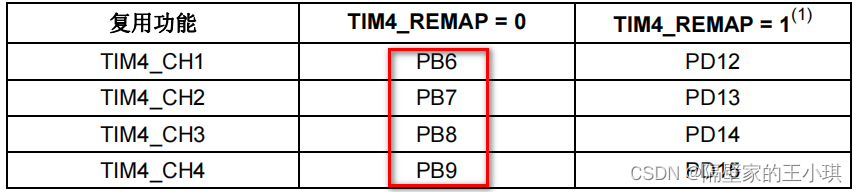
TIM4可以选择不用重映射或者重映射
一、没有重映射
下面展示主要的time.c、main.c函数的代码
#include "timer.h" void TIM4_PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//使能定时器4时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟 GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //TIM4重映射 //GPIO配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化TIM4 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 //配置TIM4的PWM TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 //CH1 TIM_OC1Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 //CH12 TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 //CH13 TIM_OC3Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 //CH14 TIM_OC4Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 TIM_Cmd(TIM4, ENABLE); //使能TIM4 }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
#include "timer.h"
int main(void)
{
delay_init(); //延时函数初始化
TIM4_PWM_Init(999,71); //不分频。PWM频率=72000000/1000/72=1Khz 周期为1ms
while(1)
{
TIM_SetCompare1(TIM4,200); //占空比20%
TIM_SetCompare2(TIM4,300); //占空比30%
TIM_SetCompare3(TIM4,400); //占空比40%
TIM_SetCompare4(TIM4,500); //占空比50%
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
下面展示主要的time.c、main.c函数的代码
#include "timer.h" void TIM4_PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//使能定时器4时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD|RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟 GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //TIM4重映射 //GPIO配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOD, &GPIO_InitStructure); //初始化TIM4 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 //配置TIM4的PWM TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 //CH1 TIM_OC1Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 //CH12 TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 //CH13 TIM_OC3Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 //CH14 TIM_OC4Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 TIM_Cmd(TIM4, ENABLE); //使能TIM4 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
#include "timer.h"
int main(void)
{
delay_init(); //延时函数初始化
TIM4_PWM_Init(999,71); //不分频。PWM频率=72000000/1000/72=1Khz 周期为1ms
while(1)
{
TIM_SetCompare1(TIM4,200); //占空比20%
TIM_SetCompare2(TIM4,300); //占空比30%
TIM_SetCompare3(TIM4,400); //占空比40%
TIM_SetCompare4(TIM4,500); //占空比50%
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop】
推荐阅读
相关标签

