
- 1【rikirobot】ROS rikirobot 配置小车网络并进行远程端控制
- 2根据Word文档用剪映批量自动生成视频发布抖音_剪映文本转视频api
- 3ThingsBoard教程(一):ThingBoard介绍及安装_thingsbroad
- 4大语言模型推理加速技术:模型压缩篇_大语言模型压缩技术
- 52024年土木工程与工业建筑国际学术会议(CEIA 2024)_浙江土木工程领域学术会议2024
- 6鸿蒙大厂目前政策&变现沉淀思考
- 72020阿里招聘岗位要求_阿里巴巴岗位要求
- 8冶炼钢铁厂热风炉发酵池煤矸石进回水无线远程温度监测
- 9用Python爬取了拉勾网的招聘信息+详细教程+趣味学习+快速爬虫入门+学习交流+大神+爬虫入门...
- 10动态表单实现原理
【毕业课题学习】6DOF物体识别及抓取-PCL点云处理(四)---Hough voting详解
赞
踩
最近一直在搞UR5在Moveit和Gazebo中的联调仿真,搞了一周多,我发现好像我的重点好像不应该放在这。。。能用就行了,在过程中,我给UR在模型文件中添加了夹爪和realsense相机以便能够在家就有实际操控的感觉。
现在回到重点,6Dof物体识别~~
这次主要文献是 Object recognition in 3D scenes with occlusions and clutter by Hough voting 图也基本是从文献里来的
以PCL官网中的示例代码为例(前面几节有讲
这个方法大多是将其划分为基于点云配准的识别方法
整体识别流程pipeline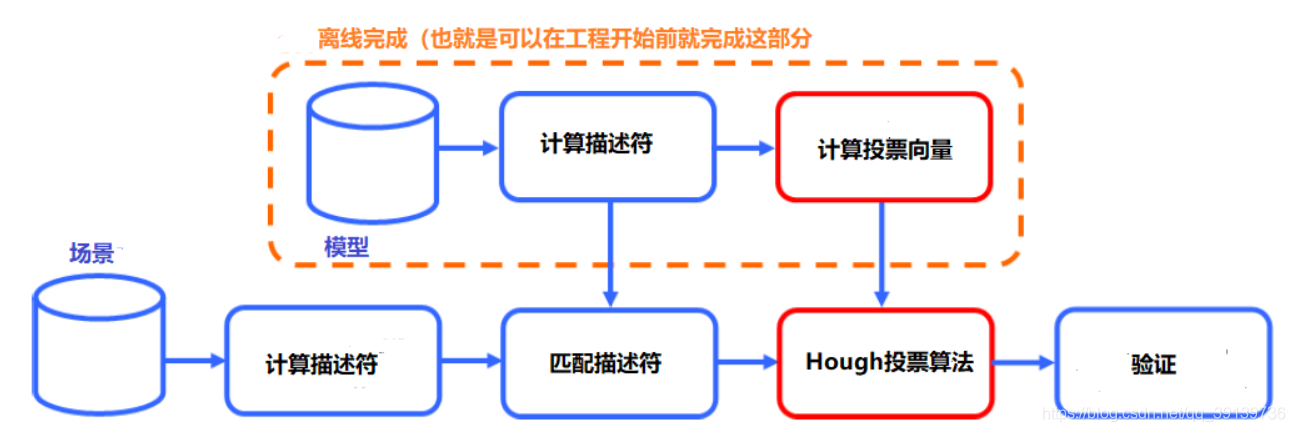
从图中可以看到,Hough voting算法就只是整个pipeline中的一部分(橙色两块)。
分析以下这个算法的实现:
- 已知条件
- 目标的模型点云
- 场景的模型点云
- 求解
- 识别目标模型
- 计算模型点云到场景点云的变换矩阵
图我就不解释了,重点还是在橙色部分,离线那部分,也就是说我有了模型文件,我可以先把离线部分完成了,数据存下来,后续做识别,只需要输入场景点云,将离线部分数据拿出来用即可,就不需要每次都把模型的部分计算一遍(节省时间)。
流程前半部分描述符匹配,一般用的是局部描述符,例如SHOT等,这里主要考量还是得看模型是什么,针对模型来挑选 对模型特征描述的最清楚的 描述符。计算描述符后,利用Kd-Tree找近邻的方式来做匹配,之前的博客也有讲。
这里我提前说一下该算法的效果:
- 可实现场景中多目标物体识别; 官方的代码可完成单目标多实例检测(如场景中若存在多个奶盒),推广后自然可以完成多目标多实例检测(多用几次该代码,对不同的模型进行匹配…
- 适用于识别多无纹理,多形状的的刚体。 比如一个水壶、鸭子玩具,识别效果就比较好;而对于方盒这种多平面的效果就不太好,因为你的特征不明显,在做匹配的时候就容易出错。
直奔主题——Hough voting实现
假设我们需要去识别场景中一个目标物体,且场景点云、模型点云 都是3d网格的形式
预处理
对模型点云和场景点云做如下两步:
- 拿到点云后,先做什么——滤波、采样,提取关键点(懒一点,平均下采样,得到的点它也叫关键点key-point,(lll¬ω¬))
- 计算局部描述符
对模型点云的处理中多了一步:
- 计算模型点云每个关键点的局部参考坐标系 。以下统称LRF(local reference frame)
很关键,这也是为什么该算法能实现旋转不变性的原因所在(SHOT描述子中也用到了LRF)。计算LRF不多做解释,简单理解就是:对于每个关键点,结合该点的领域的特征来生成一个坐标系,这个坐标系起参考的作用
之后,将两片点云的局部描述符做点对匹配,(常见的就是基于欧几里得距离做匹配)
基于LRF的方法思路
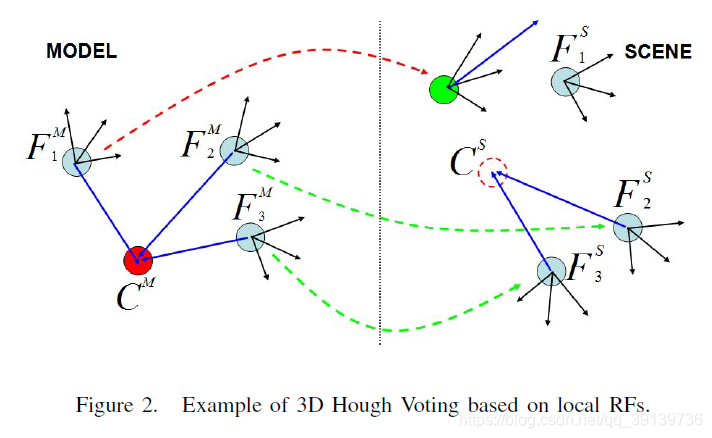
解释一下图二(照着解释梳理下去):
左边是模型(M)点云,右边是场景点云(S)
蓝色的点代表提取出的关键点;蓝色点上的三轴代表计算出的局部参考坐标系;
虚线箭头代表 模型中的关键点 与 场景中的关键点匹配上(利用其描述符),绿色的代表正确匹配,红色的代表错误匹配。
论文中CM取的是模型的中心点(pcl有计算中心点的实现)
解释完参数,讲解:
将模型的重心点CM分别与3个关键点做连线,分别得到一个向量(方向+距离),即图中蓝色的实线。有了向量,有了局部参考系,在场景点云中,反推场景中该目标的重心点-CS。图二中可以看到,两个正确匹配的关键点反推出来的CM是同一个点!
将其推广到有很多个关键点的点云,那么可想而知,在场景点云中的正确匹配的关键点反推出来的CM点 在三维空间中 一定会聚集在一起。
投票机制

这里用图三的例子来介绍投票的机制。
先看模型,是个圆柱体:中间的点代表中心点,其余的代表几个关键点,蓝色箭头是关键点指向中心点的向量。红色虚线是错误匹配的点对,绿色虚线是正确匹配的点对。
场景:有一个圆柱实例,还有一个方体、圆锥体。
接下来来做识别:
按照前面LRF部分讲的,在场景中匹配上的关键对,利用对应向量来反推物体的中心点。可以看到图三中,错误匹配的三个点反推出的中心点则各自落入了其他的方框,而两个正确匹配的点反推出的中心点落入了红色方框,那么明眼人都看得出,正确的目标(圆柱体)中心点就是在这个红色方框内。
我识别出正确的目标中心(图三中的红色方框),是不是就可以理解为 我识别出来了目标模型呢?
差不多就是这个意思。
为什么叫投票
你看图三右边场景点云部分,是将其划分成了一个个的小方块(体素votex),由关键点和向量反推出来的箭头终点,会落入到一个体素中。你把体素看作是投票箱(bin),箭头终点所指的地方看作是票(vote),那么,投票箱中的票数越多,置信度也就更高,人为设定个阈值,也就可以用来求取正确的目标中心,也就是识别目标,哪怕场景中存在多个实例,在这里也就是多个投满票的投票箱而已。
这里我们就解决了识别物体!
求解6Dof
之前是在场景中求出了中心点,点与点之间,可以计算出位置偏移 t,也就是目标模型与场景中目标物体的位移变化。
而旋转矩阵R怎么求呢?
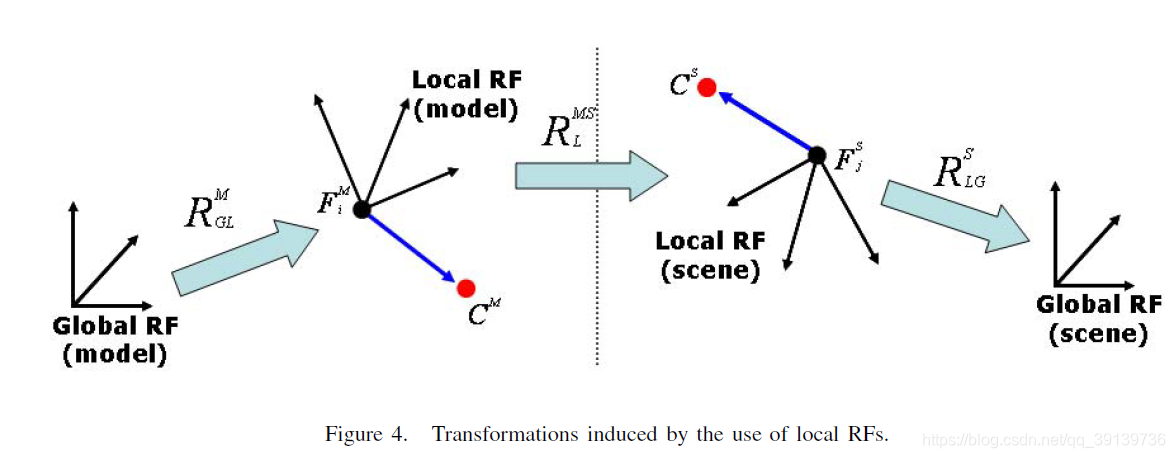
在图四中,可以清楚看到坐标系的一个变化。模型和场景的全局坐标系(Global RF)认作是视点坐标系。FMi和FSj是利用领域关系求出来的LRF。Global RF到LRF的转换是已知的(学过变换矩阵应该就了解)。中间那个RMSL旋转矩阵,代表模型中的关键点的LRF —> 场景中对应关键点的LRF 的旋转矩阵。
为方便理解,我们将一个相机(视点或者说原点处)坐标系当作是场景和模型的全局参考坐标系Global RF,相机坐标固定不动。想象相机拍摄到了两块点云,一个是model 一个是scene中的model对象,现在要求这两个之间的姿态变换,那么用匹配点对的LRF之间的旋转矩阵,即可代表这个姿态变化。点云中有多对匹配点,将每对求出来的姿态变化求平均,即是提到的 RMSL
结果
在上述算法中,我们求取得到了:
- 模型点云 -> 场景点云中的实例 = 变换矩阵T
可能现在就比较迷,求出这个有什么用,我要做抓取的话,需要的是目标物体在当前世界坐标系中的6DoF位姿。
在模型点云(比如是一个深度相机提前拍好拟合后的),求得点云中心后,人为设定目标物体的坐标系(比如水壶,正对方向是x轴,竖直是z轴),确定好后,用求得的变换矩阵T,对模型中的目标物体坐标系做转换,即可得到目标物体在当前相机坐标系中的6DoF位姿,利用标定外参矩阵,就是最后目标物体在当前世界坐标系中的6Dof位姿
抑或是实际抓取应用中,对于二指夹爪,人为提前设定模型点云里的抓取点pm,(比如抓可乐瓶的瓶身,让机械臂工具坐标系到达瓶身上方一点,并选择合适位姿)
ps=Rpm+T
ps即,在当前相机坐标系下的抓取点,让机械臂进行抓取就行了。
当然这过程还涉及什么路径规划、碰撞检测等内容。Moveit功能包了解一下……
总结
基于Hough voting的pipeline梳理到此,论文中还有很多如降低误差等细节部分未作过多解释,有时间可以对照着原文来看。博客只是把大致原理介绍清楚。在该代码实际测试过程中,我发现基于点云配准,对于已知物体,比如一个球,其实并不需要完完全全的6Dof位姿,抓哪都一样,扩展一下,抓圆柱体,只要抓到身子就行了。还是得看抓取的目标是什么,如果是规则物体,可能只需要目标的中心点+长轴,就可以完成二指抓取了。所以对于各例,可以进一步简化pipeline。
在我的linux系统笔记本上
调用pcl官网程序,参数调整合适的情况下,跑一次3s左右(没用 icp 精度上有待考量)
参数不合适的情况下,多则十多秒
下图是拿现有的不同姿态扳手(且人为做了偏移)做的匹配效果:
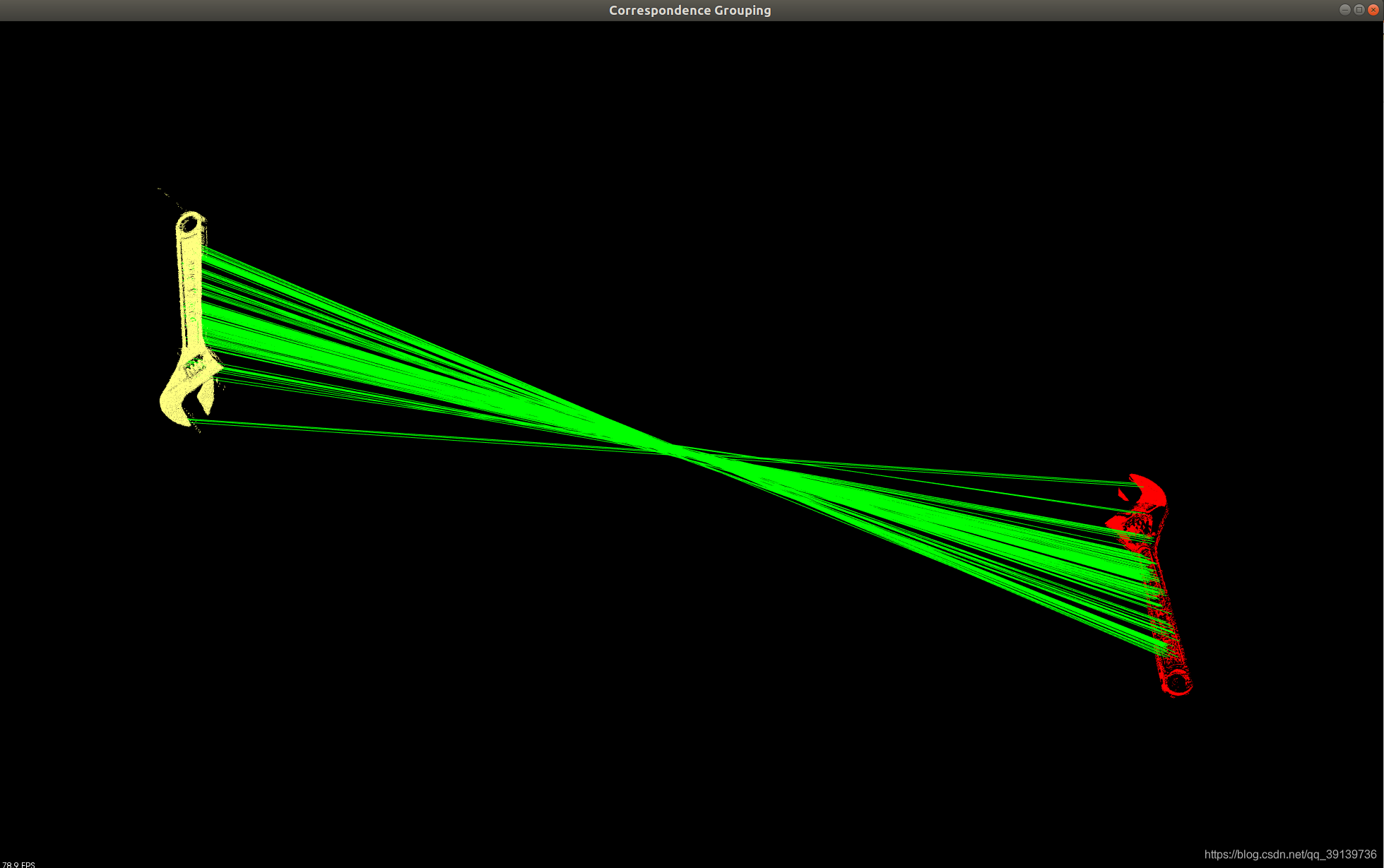
下一步,准备再找些开源代码试一试效果,欢迎留言评论好用的算法。

