
热门标签
热门文章
- 1【Python】如何在服务器上优雅的部署Python项目(Linux/Windows/Mac)_服务器部署python
- 2100 家企业软件测试笔试面试题汇总(网友真实面试后征集)_软件面试笔试题
- 3Hive介绍与环境搭建
- 4Linux——进程退出_linux退出当前进程
- 5使用solrj连接solrcloud时出现错误:NoNodeException: KeeperErrorCode = NoNode for /clusterstate.json的解决办法_nonodeexception keepererrorcode = nonode for
- 6SDK接口远程调试【内网穿透】_javasdk里面怎么调用远程服务
- 7常见处理器MCU、MPU、DSP、FPGA等嵌入式处理器概念_mcu、mpu、arm、fpga、dsp概念
- 8Java实现音频转文本(语音识别)_java cv语音识别
- 9文字生成图像内容解决方案,享受创作的乐趣
- 10【hiprint】hiprint的使用方法(附使用案例)hiprint 表格数据传输问题解决办法_hiprint官网
当前位置: article > 正文
基于fastlio的重定位过程_fast lio定位
作者:小丑西瓜9 | 2024-06-09 19:42:11
赞
踩
fast lio定位
文件改动
-
首先是ikdtree,看lasermapping.cpp的时候很明显用的是fastlio1中的ikdtree,因为不需要模板,所以需要补充fastlio1中的ikdtre.

-
然后就是cmakelist中的项目名称,统一改成fast_lio,因为不改的话,后面编译的时候就会找不到pose6d这个自定义消息,#include <fast_lio/Pose6D.h> 因为是这样引用的.
-
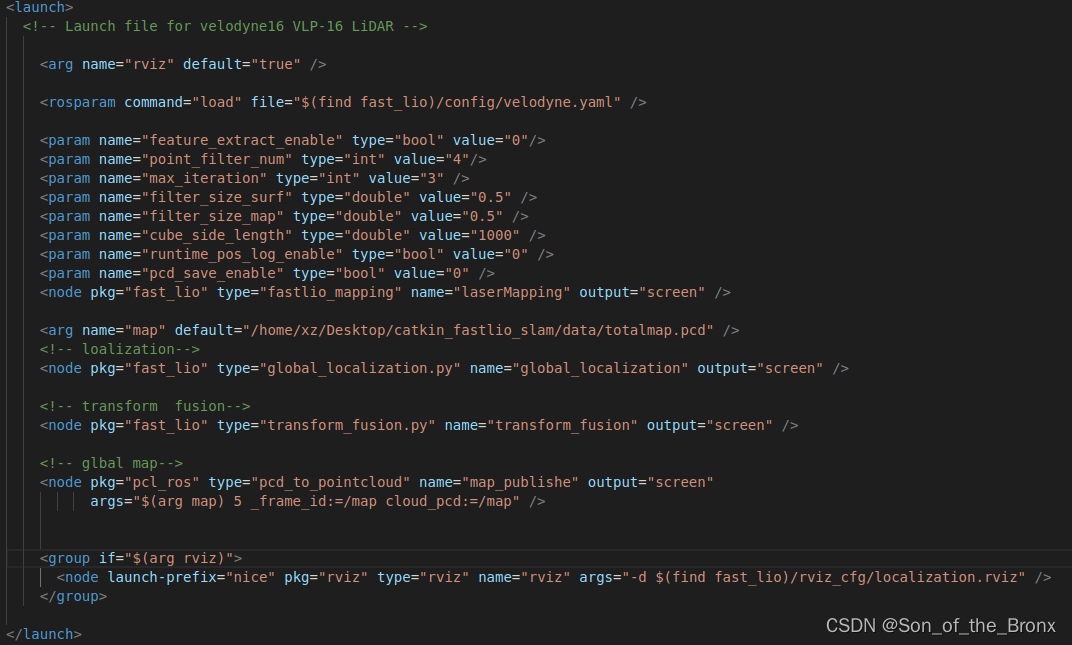
launch文件中的项目名称也要改成fast_lio.
总结
虽然编译过了,但是global_localization.py脚本有问题,因为他依赖open3d的,但是python2安装不上open3d,安装的时候出各种问题。
open3d用python3安装很方便,python2装不了,放弃,浪费一天了。ubuntu20的话应该能跑起来。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/695549
推荐阅读
相关标签

