
- 1dbGet、dbSchema、dbShape命令
- 2【目标解算】相机内外参数详细解读+坐标系转换_相机标定外参矩阵
- 3APOC函数之路径(path)用法_apoc用法
- 4还怕Github被墙?项目团队开发必备技能!
- 5移植FreeRTOS到STM32_freertos移植stm32
- 6【转】常见数字IC设计、FPGA工程师面试_fpga工程师和数字ic工程师
- 7Cracer渗透-windows基础(系统目录,服务,端口,注册表)
- 8力扣--深度优先算法419.甲板上的战舰
- 9Yalmip使用教程(6)-将约束条件写成矩阵形式_yalmip约束为矩阵怎么写
- 10React 18 系统精讲(六)类组件生命周期详解_react18组件销毁
STM32F407HAL库-1.启动文件解析_下列哪个文件是stm32f407复位后最先执行的文件?
赞
踩
1、启动文件简介
启动文件由汇编语言编写,是系统上电复位后第一个执行的第一段程序。主要做了以下工作:
- 初始化堆栈指针 SP = _initial_sp
- 初始化PC指针 = Reset_Handler
- 初始化中断向量表
- 配置系统时钟
- 调用C库函数_main初始化用户堆栈,从而最终调用main函数。
2、查找ARM汇编指令
在启动文件中,会涉及到ARM的汇编指令和Cortex内核的指令。有关Cortex内核的指令可以参考《Cortex M3与M4权威指南》第四章:指令集。剩下的ARM的汇编指令可以在MDK->Help->μVision Help中搜索到,以EQU为例,检索如下:

检索出来的结果会有很多,我们只需看Assembler User Guide这部分即可。下面列出了启动文件中使用到的ARM汇编指令,该列表的指令全部从ARM Development Tools这个帮助文档里面检索而来。其中编译器相关的指令WEAK和ALIGN为了方便也放在同一个表格了。

![]()
3、启动文件详解
Stack-栈

栈的作用是用于局部变量,函数调用,函数形参等的开销,栈的大小不能超过内部SRAM的大小。
46行:将数字常量0x00000400(1KB)定义为Stack_Size。
48行:汇编一个名为STACK的代码段,NOINIT表示不初始化,READWRITE表示可读可写,ALIGN=3,表示按照2^3对齐,即8字节对齐。
49行:分配一定大小的内存空间,单位为字节,这里指定大小等于Stack_Size。
50行:标号__initial_sp紧挨着SPACE语句放置,表示栈的结束地址,即栈顶地址,栈是由高向低生长的。
堆主要用来动态内存的分配,像malloc函数申请的内存就在堆上面。
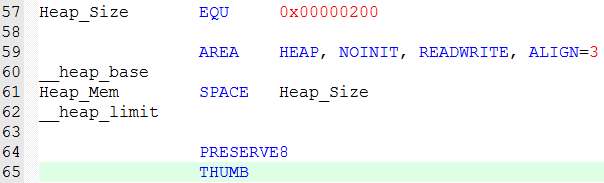
57行:将数字常量0x00000200(512字节),定义为Heap_Size。
59行:汇编一个名为HEAP的代码段,NOINIT表示不初始化,READWRITE表示可读可写,ALIGN=3,表示按照2^3对齐,即8字节对齐。
60行:__heap_base表示堆的起始地址。
61行:分配一定大小的内存空间,单位为字节,这里指定大小等于Heap_Size。
62行:__heap_limit表示堆的结束地址。
64行:指定当前文件的堆栈按照8字节对齐。
65行:表示后面指令兼容THUMB指令。THUBM是ARM以前的指令集,16bit,现在Cortex-M系列的都使用THUMB指令集,THUMB-2是32位的,兼容16位和32位的指令。

69行:定义一个数据段,名字为RESET,仅包含数据,而不是指令,可读。
70、71、72行:声明__Vectors、__Vectors_End 和__Vectors_Size这三个标号具有全局属性,可供外部的文件调用。__Vectors为向量表起始地址,__Vectors_End为向量表结束地址,两个想减即可算出向量表大小__Vectors_Size。


74-178行(请参考startup_stm32f407xx.s文件):这里是STM32F407向量表,当内核响应了一个发生异常后,对应的异常服务例程(ESR)就会执行,为了决定ESR的入口地址,内核使用了“向量表查表机制”。向量表其实是一个WORD(32位整数)数组,每个下标对应一种异常,该下标元素的值则是该ESR的入口地址。向量表从FLASH的0地址开始放置,以4个字节为一个单位,地址0存放的是栈顶地址,0x04存放的是复位程序的地址,以此类推。从代码上看,向量表中存放的都是中断服务函数的函数名,因为C语言中的函数名就是一个地址。(0号类型并不是什么入口地址,而是给出了复位后MSP的初值)。

180行:定义一个名称为.text的代码段,可读。
183-192行:定义一个复位子程序,复位子程序是系统上电后第一个执行的程序,调用SystemInit函数初始化系统时钟,然后调用C库函数__main,最终调用main函数去实现C语言代码。SystemInit()是一个标准的库函数,在system_stm32f4xx.c这个库文件中定义,主要作用是配置系统时钟。__main是一个标准的C库函数,主要作用是初始化用户堆栈,最终调用main函数,这就是为什么我们写的程序都有一个main函数的原因。
LDR、BLX、BX是CM4内核的指令,具体作用如下:



196-408行(请参考startup_stm32f407xx.s文件):这部分是中断服务程序,在启动文件里面已经帮我们写好所有中断的中断服务函数,跟我们平时写的中断服务函数不一样的就是这些函数都是空的,真正的中断服务程序需要我们在外部的C文件里面重新实现,这里只是提前占了一个位置而已。
如果我们在使用某个外设的时候,开启了某个中断,但是又忘记编写配套的中断服务程序或者函数名写错,那当中断来临的时候,程序就会跳转到启动文件预先写好的空的中断服务程序中,并且在这个空函数中无线循环,即程序就死在这里。

413-422行:首先判断是否定义了__MICROLIB,如果定义了这个宏则赋予标号__initial_sp(栈顶地址)、__heap_base(堆起始地址)、__heap_limit(堆结束地址)全局属性,可供外部文件调用。__MICROLIB这个宏我们在KEIL里面配置,如下图。配置后堆栈的初始化就由C库函数__main来完成。

如果没有定义__MICROLIB,则插入标号__use_two_region_memory。__use_two_region_memory用于指定存储器模式为双段模式,即一部分储存区用于栈空间,其他的存储区用于堆空间。然后声明标号__user_initial_stackheap具有全局属性,可供外部文件调用,标号中分别实现了向R0、R1、R2、R3寄存器中加载栈和堆的大小值。

