- 1xss漏洞的修复建议/方法_xss漏洞修复
- 2http 和 https 的区别?
- 3Vue3 - 获取 Proxy 对象代理中包裹的 “真实数据“,解决对象或数组打印后是 Proxy 对象无法拿到原始数据的问题(提供 2 种详细解决方案)_vue3proxy里面拿到数组
- 4cudnn环境变量配置_cudnn 环境变量
- 5基于卷积神经网络的多目标图像检测研究(一)_多类目标图像识别
- 6Android中怎么重新启动APP或系统_kotlin android重启当前app
- 7计算机网络——网络层(2)
- 8在虚拟机上安装centos7_pve安装centos7
- 9Vue3中的Proxy和Reflect_vue3 refs proxy
- 10前端食堂技术周刊第 109 期:Vue2 即将 EOL、CSS 年度回顾、11 月登陆 Web 平台的新功能、Oxlint、shadcn/ui 揭秘、TC39 faq_vue shadcn-ui
OpenCV入门基础学习
赞
踩
目录
一:OpenCV简介
OpenCV于1999年由Gary Bradsky在英特尔创立,第一个版本于2000年问世
Opencv(Open Source Computer Vision Library)是一个基于开源发行的跨平台计算机视觉库,它实现了图像处理和计算机视觉方面的很多通用算法,已成为计算机视觉领域最有力的研究工具
Opencv由一系列C函数和少量C++类构成,也有提供其他语言的接口,例如支持python、matlab等语言;
OpenCV概念区分
图像处理侧重于“处理”图像--如增强,还原,去噪,分割等等
计算机视觉重点在于使用计算机来模拟人的视觉【计算机无法做到绝对,只能是看起来像,因此在智能驾驶方面,人们还是更相信自己】,因此模拟才是计算机视觉领域的最终目标
OpenCV应用领域
包括在卫星和网络地图上拼接图像,图像扫描校准,医学图像的降噪,目标分析,安保以及工业检测系统,自动驾驶和安全系统,制造感知系统,相机校正,军事应用,无人空中、地面、水下航行器
Opencv结构
OpenCV是一个具有19个模块作为代码容器组合起来的一个sdk
二:OpenCV图像处理 图像
在计算机看来,图像只是一些亮度各异的点,一副M*N的图片可以用M*N的矩阵来表示,矩阵的值表示这个位置上像素的亮度,他可以被表示为多种模式
位图模式
灰度模式
RGB模式

三:OpenCV图像处理 图像模式
RGB深度:就是每一个像素点都是 红 绿 蓝 三基色 叠加在一起得出的
位图模式
位图模式是1位深度的图像
它只是黑和白两种颜色;它可以由扫描或置入黑色的矢量线条图像生成,也能由灰度模式转换而成;其他图像模式不能直接转换为位图模式

灰度模式
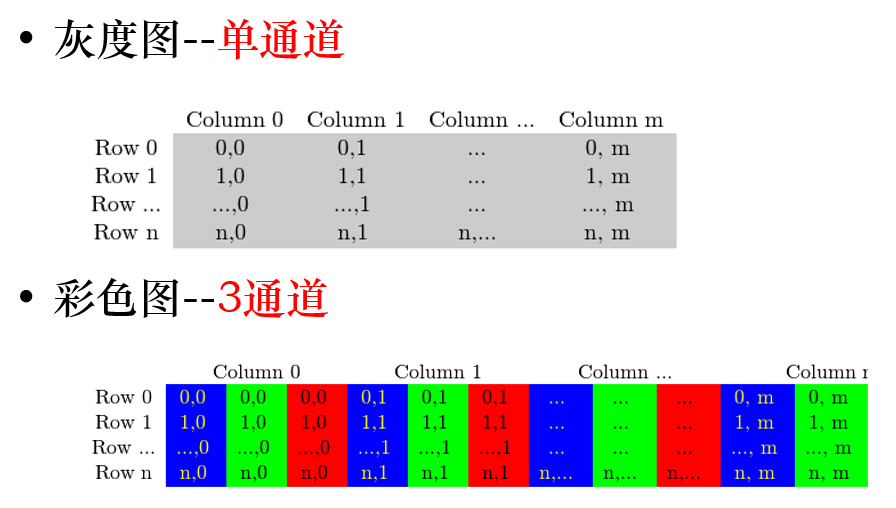
灰度模式是8位深度的图像模式,在全黑和全白之间插有254个(2^8)灰度等级的颜色来描绘灰度模式的图像,所有模式的图像都能换成灰度模式

RGB模式
RGB模式是数码图像中最重要的一个模式,它不是用数码而是用电平来描述的
扫描仪和数码相机都是捕捉RGB图像信息的
RGB模式是24位颜色深度
它共有三个通道,每个通道都有8位深度
三个通道合成一起可生成1677万种颜色,我们也称之谓“真彩色”

对于黑色RGB 0 0 0,对于白色RGB 255 255 255 ,
RGB也就是三个通道(红绿蓝)的合成
注意点
在OpenCV中 Mat:BGR [ Mat图像矩阵 横+ 纵 +深度 ]
在Qt中 QImage:RGB
通常情况下,分辨率越高,像素点越多,能够呈现出来的 颜色由深到浅之间的过渡也变得越来越多,视觉感官就越好

四:OpenCV图像识别 图片操作
图片操作:读图像
Mat矩阵对象 图像操作 读图像 像素格子[每个矩阵都有三个通道]
函数功能:载入一张图片;
函数原型: Mat cv::imread(char filename,int flag);
函数返回值:Mat可以理解为一个存储数据的容器,定义了一个img对象来存图片的数据。
函数的参数意义:
参数1:图片路径名
参数2:cv::IMREAD_COLOR:读入一副彩色图像。图像的透明度会被忽略,这是默认参数。--可以写成1
cv::IMREAD_GRAYSCALE:以灰度模式读入图像--可以写成0
cv::IMREAD_UNCHANGED:读入一幅图像,并且包括图像的 alpha 通道---可以写成-1
例如:imread读取图片
using namespace cv Mat img = imread("C:/daima practice/opencv/mat3/mat3/image4.jpg",1);
图片操作 :显示图片
功能:显示一张图片;
函数原型:
void cv::imshow(const String&vinname,InputArry mat);
返回值: 无类型
参数:
参数1:显示的窗口名,可以使用cv::namedWindow函数 创建窗口,如不创建,imshow函数自动创建
参数2:需要显示的图像
例如:imshow显示图片
imshow(“image”,mat);
waitKey(0);
图片操作:保存图片
功能:保存一张图片到指定的文件;
函数原型:bool cv::imwrite(const String& filename,
InputArry mat,
const std::vector<int>¶ms=std::vector<int>());
返回值: bool类型
参数:
参数1:图片名称.图片格式
参数2:Mat类型的图像数据
参数3:特定格式保存的参数编码,默认值为 std::vector<int>();一般可以不写
例如:imwrite(“c:\\image\\one.png”,mat);
五:OpenCV图像处理 Mat类
Mat类 (Matrix的缩写) 是OpenCV用于处理图像而引入的一个封装类;他是一个自动内存管理工具
Mat:本质上是由两个数据部分组成的类:(包含信息有矩阵的大小,用于存储的方法,矩阵存储的地址等)矩阵头和一个指针,指向包含了像素值的矩阵(可根据选择用于存储的方法采用任何维度存储数据);矩阵头部的大小是恒定的。然而,矩阵本身的大小因图像的不同而不同,通常是较大的数量级图像矩阵比较耗时

Mat(int rows, int cols, int type, const Scalar& s);
参数介绍:
rows:行
cols:列
type:类型 CV_[位数][带符号与否][类型前缀]C[通道数]
s:用于初始化Mat行列的数据 一般为数组。
例如:Mat m1(2, 2, CV_8UC3, Scalar(0, 0, 255));
六:OpenCV图像处理 图片 像素
像素:是指由图像的小方格组成的,这些小方格都有一个明确的位置和被分配的色彩数值,小方格颜色和位置就决定该图像所呈现出来的样子;像素点不可再分割成更小的单位或元素
一张图片就是由很多个像素点组成的,如果图片大小为25*25,那么这张图片就是由625个像素点组成,一行有25个像素点,一共25列
一张图片所有的像素点存在MAT矩阵中,MAT(i,j)的值就是当前像素点的值
像素的操作:
- #include<opencv2/opencv.hpp>
- #include<opencv2/highgui/highgui.hpp>
- using namespace std;
- using namespace cv;
- int main()//访问每个像素,使用指针的方式
- {
- Mat img = imread("lol1.jpg");
- for (int i = 0; i < img.rows; i++)
- {
- uchar* data = img.ptr<uchar>(i); //获取第i行地址
- for (int j = 0; j < img.cols; j++)
- {
- printf("%d\n",data[j]);
- }
- }
- waitKey(0);
- }
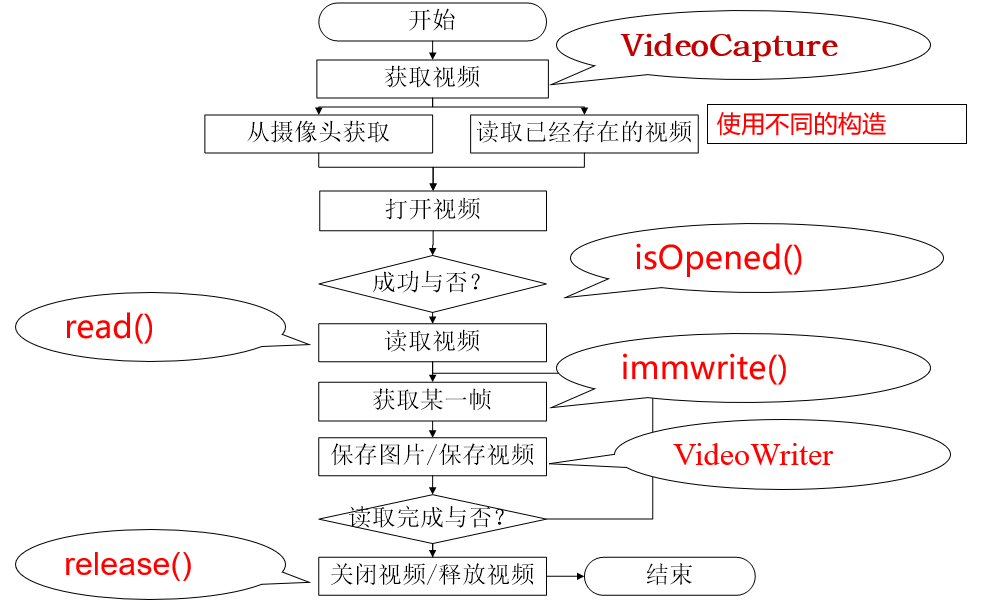
七:OpenCV图像处理的使用 视频操作
视频是由一张张图片组成的,在视频中把每一张图片称为一帧
利用opencv对视频的操作:
捕获视频
打开视频
获取视频中的某一帧
视频的主要操作流程如下: