
- 1若依系列框架RuoYi-Vue(117集)、RuoYi-Cloud(134集)最新完整视频_若依框架(ruoyi)系列视频教程 ruoyi-vue前后端分离版本 118集
- 2802.11局域网的 MAC 层协议、CSMA/CA
- 3在Windows上搭建OpenVINO™ Java开发环境
- 451单片机-WIFI模块_51 与wifi模组
- 5【AIGC大模型】跑通wonder3D (windows)
- 6SpringBoot中开启logback日志 (一)_logback开启某个包debug日志
- 7Chrome插件精选_video downloader professional chrome
- 8Zabbix监控华为交换机
- 9九、【python计算机视觉编程】图像分割_python graph cut
- 10使用MIB Builder 生成MIB文件_mlbb creator base
OpenCV入门教程(非常详细)从零基础入门到精通,看完这一篇就够了_opencv教程
赞
踩
OpenCV基础入门【C++语言】
-
- Chapter1 读取图片/视频/摄像头
-
- 从文件读取图片
- 从文件读取视频
- 读摄像头
- Chapter2 基础函数
- Chapter3 调整和剪裁
- Chapter4 绘制形状和文字
- Chapter5 透视变换
- Chapter6 颜色检测
- Chapter7 形状/轮廓检测
- Chapter8 人脸检测
- Project1 虚拟画家
- Project2 文档扫描
- Project3 车牌检测
- OpenCV3.4.6安装包(含contrib):https://pan.baidu.com/s/1KBD-fAO63p0s5ANYa5XcEQ 提取码:p7j0
- resources资源:https://pan.baidu.com/s/1nkQ6iVV7IeeP4gTXvM_DyQ 提取码:ypvt
Chapter1 读取图片/视频/摄像头
从文件读取图片
| 模块 | 功能 |
|---|---|
| imgcodecs | Image file reading and writing |
| imgproc | Image Procssing |
| highgui | High-level GUI |
Mat cv::imread(const String &filename, int flags = IMREAD_COLOR)
从文件加载图像。函数
imread从指定文件加载图像并返回。 如果无法读取图像(由于缺少文件、权限不正确、格式不受支持或无效),该函数将返回一个空矩阵(Mat::data==NULL)。在彩色图像的情况下,解码图像的通道将以 B G R 顺序存储。
void cv::imshow(cosnst String &winnanme, InputArray mat)
在指定窗口中显示图像。这个函数后面应该是
cv::waitKey函数,它显示指定毫秒的图像。否则,它不会显示图像。例如,waitKey(0)将无限显示窗口,直到有任何按键(适用于图像显示)。waitKey(25)将显示一帧 25 毫秒,之后显示将自动关闭。(如果你把它放在一个循环中读取视频,它会逐帧显示视频)
int cv::waitKey(int delay = 0)
等待按下的键。函数
waitKey无限等待按键事件(当delay≤0时)或延迟毫秒,当它为正时。由于操作系统在切换线程之间有最短时间,因此该函数不会完全等待延迟毫秒,它会至少等待延迟毫秒,具体取决于当时您计算机上正在运行的其他内容。如果在指定的时间过去之前没有按下任何键,则返回被按下键的代码或 -1。
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; int main() { string path = "Resources/test.png"; Mat img = imread(path); imshow("Image", img); waitKey(0); //显示图片不会一闪而过 return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18

从文件读取视频
要捕获视频,需要创建一个VideoCapture对象。它的参数可以是视频文件的名称或设备索引。
OpenCV3.4.6中VideoCapture类构造函数及成员函数
cv::VideoCapture::VideoCapture()cv::VideoCapture::VideoCapture(const String &filename)cv::VideoCapture::VideoCapture(const String &filename, int apiPreference)cv::VideoCapture::VideoCapture(int index)cv::VideoCapture::VideoCapture(int index, int apiPreference)
打开视频文件或捕获设备或 IP 视频流进行视频捕获。
virtual bool cv::VideoCapture::isOpened() const
如果视频捕获已经初始化,则返回true。如果先前对
VideoCapture构造函数或VideoCapture::open()的调用成功,则该方法返回 true。
virtual bool cv::VideoCapture::read(OutputArray image)
抓取、解码并返回下一个视频帧。
virtual double cv::VideoCapture::get(int proId) const
返回指定的
VideoCapture属性。
virtual double cv::VideoCapture::set(int proId, double value)
在
VideoCapture中设置一个属性。
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; int main() { string path = "Resources/test_video.mp4"; VideoCapture cap(path); //视频捕捉对象 Mat img; while (true) { cap.read(img); imshow("Image", img); waitKey(1); } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
读摄像头
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; int main() { VideoCapture cap(0); Mat img; while (true) { cap.read(img); imshow("Image", img); waitKey(1); } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
Chapter2 基础函数
void cv::cvtColor(InputArray src, OutputArray dst, int code, int dstCn = 0)
将图像从一种颜色空间转换为另一种颜色空间。该函数将输入图像从一种颜色空间转换为另一种颜色空间。在从 RGB 颜色空间转换的情况下,应明确指定通道的顺序(RGB 或 BGR)。man请注意,OpenCV 中的默认颜色格式通常称为 RGB,但实际上是 BGR(字节反转)。因此,标准(24 位)彩色图像中的第一个字节将是 8 位蓝色分量,第二个字节将是绿色,第三个字节将是红色。 然后第四、第五和第六个字节将是第二个像素(蓝色,然后是绿色,然后是红色),依此类推。
void cv::GaussianBlur(InputArray src, OutputArray dst, Size ksize, double sigmaX, doube sigmaY = 0, int borderType = BORDER_DEFAULT)
使用高斯滤波器模糊图像。该函数将源图像与指定的高斯核进行卷积。
void cv::Canny(InputArray image, OutputArray edges, double threshold1, double threshold2, int apertureSize = 3, bool L2gradient = false)
使用 Canny 算法在图像中查找边缘。
Mat cv::getStructuringElement(int shape, Size ksize, Point anchor = Point(-1, -1))
返回指定大小和形状的结构元素,用于形态学操作。该函数构造并返回可以进一步传递给腐蚀、扩张或形态学的结构元素。 但是您也可以自己构建任意二进制掩码并将其用作结构元素。
void cv::dilate(InputArray src, OutputArray dst, InuputArray kernel, Point anchor = Point(-1, -1), int iterations = 1, int borderType = BORDER_CONSTANT, const Scalar &borderValue = morphologyDefaultBorderValue())
使用特定的结构元素膨胀图像。
void cv::erode(InputArray src, OutputArray dst, InuputArray kernel, Point anchor = Point(-1, -1), int iterations = 1, int borderType = BORDER_CONSTANT, const Scalar &borderValue = morphologyDefaultBorderValue())
使用特定的结构元素腐蚀图像。
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; int main() { string path = "resources/test.png"; Mat img = imread(path); Mat imgGray, imgBlur, imgCanny, imgDil, imgErode; cvtColor(img, imgGray, COLOR_BGR2GRAY); //灰度化 GaussianBlur(img, imgBlur, Size(3, 3), 3, 0); //高斯模糊 Canny(imgBlur, imgCanny, 25, 75); //边缘检测 Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3)); dilate(imgCanny, imgDil, kernel); erode(imgDil, imgErode, kernel); imshow("Image", img); imshow("ImageGray", imgGray); imshow("ImageBlur", imgBlur); imshow("ImageCanny", imgCanny); imshow("ImageDilation", imgDil); imshow("ImageErode", imgErode); waitKey(0); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33





Chapter3 调整和剪裁
void cv::resize(InputArray src, OutputArray dst, Size dsize, double fx=0, double fy=0, int interpolation = INTER_LINEAR)
调整图像的大小。函数
resize将图像src的大小缩小到或最大到指定的大小。请注意,不考虑初始dst类型或大小。相反,大小和类型是从src、dsize、fx 和 fy派生的。
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; int main() { string path = "resources/test.png"; Mat img = imread(path); Mat imgResize, imgCrop; cout << img.size() << endl; resize(img, imgResize, Size(), 0.5, 0.5); Rect roi(200, 100, 300, 300); imgCrop = img(roi); imshow("Image", img); imshow("ImageResieze", imgResize); imshow("ImageCrop", imgCrop); waitKey(0); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28


Chapter4 绘制形状和文字
Mat(int rows, int cols, int type, const Scalar &s)
重载的构造函数
void cv::circle(InputOutputArray img, Point center, int radius, const Scalar &color, int thickness=1, int lineType=LINE_8, int shift=0)
函数
cv::circle用给定的中心和半径绘制一个简单的或实心圆。
void cv::rectangle(InputOutputArray img, Point pt1, Point pt2, const Scalar &color, int thickness=1, int lineType=LINE_8, int shift=0)void cv::rectangle(Mat &img, Rect rec, const Scalar &color, int thickness=1, int lineType=LINE_8, int shift=0)
绘制一个简单的、粗的或填充的右上矩形。函数
cv::rectangle绘制一个矩形轮廓或两个对角为 pt1 和 pt2 的填充矩形。
void cv::line (InputOutputArray img, Point pt1, Point pt2, const Scalar &color, int thickness=1, int lineType=LINE_8, int shift=0)
绘制连接两点的线段。函数
line绘制图像中 pt1 和 pt2 点之间的线段。
void cv::putText (InputOutputArray img, const String &text, Point org, int fontFace, double fontScale, Scalar color, int thickness=1, int lineType=LINE_8, bool bottomLeftOrigin=false)
绘制一个文本字符串。函数
cv::putText在图像中呈现指定的文本字符串。无法使用指定字体呈现的符号将替换为问号。
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; int main() { //Blank Image Mat img(512, 512, CV_8UC3, Scalar(255, 255, 255)); circle(img, Point(256, 256), 155, Scalar(0, 69, 255), FILLED); rectangle(img, Point(130, 226), Point(382, 286), Scalar(255, 255, 255), -1); line(img, Point(130, 296), Point(382, 296), Scalar(255, 255, 255), 2); putText(img, "SJN's Workshop", Point(137, 262), FONT_HERSHEY_DUPLEX, 0.95, Scalar(0, 69, 255), 2); imshow("Image", img); waitKey(0); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25

Chapter5 透视变换
Mat cv::getPerspectiveTransform (const Point2f src[], const Point2f dst[])
返回相应 4 个点对的 3x3 透视变换。
void cv::warpPerspective (InputArray src, OutputArray dst, InputArray M, Size dsize, int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, const Scalar &borderValue=Scalar())
对图像应用透视变换。
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; float w = 250, h = 350; Mat matrix, imgWarp; int main() { string path = "Resources/cards.jpg"; Mat img = imread(path); Point2f src[4] = { {529, 142}, {771, 190}, {405, 395}, {674, 457} }; Point2f dst[4] = { {0.0f, 0.0f}, {w, 0.0f}, {0.0f, h}, {w, h} }; matrix = getPerspectiveTransform(src, dst); warpPerspective(img, imgWarp, matrix, Point(w, h)); for (int i = 0; i < 4; i++) { circle(img, src[i], 10, Scalar(0, 0, 255), FILLED); } imshow("Image", img); imshow("ImageWarp", imgWarp); waitKey(0); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33


注:文档扫描用到这种变换技术
Chapter6 颜色检测
void cv::inRange (InputArray src, InputArray lowerb, InputArray upperb, OutputArray dst)
检查数组元素是否位于其他两个数组的元素之间。
void cv::namedWindow (const String &winname, int flags = WINDOW_AUTOSIZE)
创建一个窗口。函数
namedWindow创建一个可用作图像和轨迹栏占位符的窗口。创建的窗口由它们的名称引用。如果同名的窗口已经存在,则该函数不执行任何操作。
int cv::createTrackbar (const String &trackbarname, const String &winname, int *value, int count, TrackbarCallback onChange = 0, void *userdata = 0)
创建一个
trackbar并将其附加到指定窗口。函数createTrackbar创建一个具有指定名称和范围的trackbar(滑块或范围控件),分配一个变量值作为与trackbar同步的位置,并指定回调函数onChange为 在跟踪栏位置变化时被调用。创建的轨迹栏显示在指定的窗口winname中。
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; Mat imgHSV, mask; int hmin = 0, smin = 110, vmin = 153; int hmax = 19, smax = 240, vmax = 255; int main() { string path = "resources/lambo.png"; Mat img = imread(path); cvtColor(img, imgHSV, COLOR_BGR2HSV); namedWindow("Trackbars", (640, 200)); createTrackbar("Hue Min", "Trackbars", &hmin, 179); createTrackbar("Hue Max", "Trackbars", &hmax, 179); createTrackbar("Sat Min", "Trackbars", &smin, 255); createTrackbar("Sat Max", "Trackbars", &smax, 255); createTrackbar("Val Min", "Trackbars", &vmin, 255); createTrackbar("Val Max", "Trackbars", &vmax, 2555); while (true) { Scalar lower(hmin, smin, vmin); Scalar upper(hmax, smax, vmax); inRange(imgHSV, lower, upper, mask); imshow("Image", img); imshow("Image HSV", imgHSV); imshow("Image Mask", mask); waitKey(1); } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42




Chapter7 形状/轮廓检测
void cv::findContours(InputOutputArray image, OutputArrayOfArrays contours, OutputArray hierarchy, int mode, int method, Point offset = Point())
在二值图像中查找轮廓。从OpenCV3.2开始源图像不会这个函数被修改。
| 参数 | 含义 |
|---|---|
| image | 二值输入图像 |
| contours | 检测到的轮廓,每个轮廓都存储为点向量(例如 std::vector<std::vector<cv::Point> >) |
| hierarchy | 可选的输出向量(例如 std::vector<cv::Vec4i>),包含有关图像拓扑的信息 |
| mode | 轮廓检索模式 |
| method | 轮廓近似方式 |
| offset | 每个轮廓点移动的可选偏移量 |
double cv::contourArea(InputArray contour, bool oriented=false)
计算轮廓区域
double cv::arcLength(InputArray curve, bool closed)
计算曲线长度或闭合轮廓周长
void cv::approxPolyDP(InputArray curve, OutputArray approxCurve, double epsilon, bool closed)
函数
cv::approxPolyDP用另一个具有较少顶点的曲线/多边形来逼近一条曲线或多边形,以使它们之间的距离小于或等于指定的精度。
Rect cv::boundingRect(InputArray array)
计算并返回指定点集或灰度图像非零像素的最小上边界矩形。
void cv::drawContours(InputOutputArray image, InputArrayOfArrays contours, int contourIdx, const Scalar &color, int thickness = 1, int lineType = LINE_8, InputArray hierarchy = noArray(), int maxLevel = INT_MAX, Point offset = Point())
绘制轮廓轮廓或填充轮廓。如果厚度≥0,该函数在图像中绘制轮廓轮廓,如果厚度<0,则填充轮廓所包围的区域。
Point_< _Tp > tl() const
左上角
Point_< _Tp > br() const
右下角
//rect
template<typename _Tp> class cv::Rect_< _Tp >
typedef Rect_<int> cv::Rect2i
typedef Rect2i cv::Rect
//point
template<typename _Tp> class cv::Point_< _Tp >
typedef Point_<int> cv::Point2i
typedef Point2i cv::Point
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
cv::Rect_< _Tp >类属性 | 含义 |
|---|---|
| height | 矩形高度 |
| width | 矩形宽度 |
| x | 左上角的 x 坐标 |
| y | 左上角的 y 坐标 |
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; void getContours(Mat imgDil, Mat img) { vector<vector<Point>> contours; //轮廓数据 vector<Vec4i> hierarchy; findContours(imgDil, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE); //通过预处理的二值图像找到所有轮廓contours //drawContours(img, contours, -1, Scalar(255, 0, 255), 2); //绘制所有轮廓 for (int i = 0; i < contours.size(); i++) { double area = contourArea(contours[i]); //计算每个轮廓区域 cout << area << endl; vector<vector<Point>> conPoly(contours.size()); vector<Rect> boundRect(contours.size()); string objectType; if (area > 1000) //过滤噪声 { //找轮廓的近似多边形或曲线 double peri = arcLength(contours[i], true); approxPolyDP(contours[i], conPoly[i], 0.02 * peri, true); cout << conPoly[i].size() << endl; boundRect[i] = boundingRect(conPoly[i]); //找每个近似曲线的最小上边界矩形 int objCor = (int)conPoly[i].size(); if (objCor == 3) { objectType = "Tri"; } if (objCor == 4) { float aspRatio = (float)boundRect[i].width / boundRect[i].height; //宽高比 cout << aspRatio << endl; if (aspRatio > 0.95 && aspRatio < 1.05) { objectType = "Square"; } else { objectType = "Rect"; } } if (objCor > 4) { objectType = "CirCle"; } drawContours(img, conPoly, i, Scalar(255, 0, 255), 2); //绘制滤除噪声后的所有轮廓 rectangle(img, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 5); //绘制边界框 putText(img, objectType, { boundRect[i].x, boundRect[i].y - 5 }, FONT_HERSHEY_PLAIN, 1, Scalar(0, 69, 255), 1); } } } int main() { string path = "resources/shapes.png"; Mat img = imread(path); Mat imgGray, imgBlur, imgCanny, imgDil; // Preprocessing cvtColor(img, imgGray, COLOR_BGR2GRAY); GaussianBlur(imgGray, imgBlur, Size(3, 3), 3, 0); Canny(imgBlur, imgCanny, 25, 75); Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3)); dilate(imgCanny, imgDil, kernel); getContours(imgDil, img); imshow("Image", img); /*imshow("Image Gray", imgGray); imshow("Image Blur", imgBlur); imshow("Image Canny", imgCanny); imshow("Image Dil", imgDil);*/ waitKey(0); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83

Chapter8 人脸检测
涉及模块objdetect:Object Detection
class cv::CascadeClassifier
用于对象检测的级联分类器类。
bool load (const String &filename)
从文件加载分类器。
bool empty() const
检查分类器是否已加载。
void detectMultiScale(InputArray image, std::vector<Rect> &objects, double scaleFactor=1.1, int minNeighbors=3, int flags=0, Size minSize=Size(), Size maxSize=Size())
检测输入图像中不同大小的对象。检测到的对象作为矩形列表返回。
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <opencv2/objdetect.hpp> #include <iostream> using namespace cv; using namespace std; int main() { string path = "Resources/test.png"; Mat img = imread(path); CascadeClassifier faceCascade; faceCascade.load("Resources/haarcascade_frontalface_default.xml"); if (faceCascade.empty()) { cout << "XML file not loaded" << endl; } vector<Rect> faces; faceCascade.detectMultiScale(img, faces, 1.1, 10); for (int i = 0; i < faces.size(); i++) { rectangle(img, faces[i].tl(), faces[i].br(), Scalar(255, 0, 255), 3); } imshow("Image", img); waitKey(0); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33

Project1 虚拟画家
颜色选择器:先找出待检测颜色的HSV阈值
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; int main() { VideoCapture cap(1); Mat img; Mat imgHSV, mask, imgColor; int hmin = 0, smin = 0, vmin = 0; int hmax = 179, smax = 255, vmax = 255; namedWindow("Trackbars", (640, 200)); // Create Window createTrackbar("Hue Min", "Trackbars", &hmin, 179); createTrackbar("Hue Max", "Trackbars", &hmax, 179); createTrackbar("Sat Min", "Trackbars", &smin, 255); createTrackbar("Sat Max", "Trackbars", &smax, 255); createTrackbar("Val Min", "Trackbars", &vmin, 255); createTrackbar("Val Max", "Trackbars", &vmax, 255); while (true) { cap.read(img); cvtColor(img, imgHSV, COLOR_BGR2HSV); Scalar lower(hmin, smin, vmin); Scalar upper(hmax, smax, vmax); inRange(imgHSV, lower, upper, mask); // hmin, smin, vmin, hmax, smax, vmax; cout << hmin << ", " << smin << ", " << vmin << ", " << hmax << ", " << smax << ", " << vmax << endl; imshow("Image", img); imshow("Mask", mask); waitKey(1); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
利用检测到颜色的矩形框上边界中点开始虚拟作画
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; Mat img; vector<vector<int>> newPoints; vector<vector<int>> myColors{ {124, 48, 117, 143, 170, 255}, //purple {68, 72, 156, 102, 126, 255} }; //green vector<Scalar> myColorValues{ {255, 0, 255}, //purple {0, 255, 0} }; //green Point getContours(Mat imgDil) { vector<vector<Point>> contours; //轮廓数据 vector<Vec4i> hierarchy; findContours(imgDil, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE); //通过预处理的二值图像找到所有轮廓contours //drawContours(img, contours, -1, Scalar(255, 0, 255), 2); //绘制所有轮廓(不滤除噪声) vector<vector<Point>> conPoly(contours.size()); vector<Rect> boundRect(contours.size()); Point myPoint(0, 0); for (int i = 0; i < contours.size(); i++) { double area = contourArea(contours[i]); //计算每个轮廓区域 cout << area << endl; if (area > 1000) //过滤噪声 { //找轮廓的近似多边形或曲线 double peri = arcLength(contours[i], true); approxPolyDP(contours[i], conPoly[i], 0.02 * peri, true); cout << conPoly[i].size() << endl; boundRect[i] = boundingRect(conPoly[i]); //找每个近似曲线的最小上边界矩形 myPoint.x = boundRect[i].x + boundRect[i].width / 2; myPoint.y = boundRect[i].y; //drawContours(img, conPoly, i, Scalar(255, 0, 255), 2); //绘制滤除噪声后的所有轮廓 //rectangle(img, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 5); //绘制边界框 } } return myPoint; //返回矩形框上边界中点坐标 } vector<vector<int>> findColor(Mat img) { Mat imgHSV, mask; cvtColor(img, imgHSV, COLOR_BGR2HSV); for (int i = 0; i < myColors.size(); i++) { Scalar lower(myColors[i][0], myColors[i][1], myColors[i][2]); Scalar upper(myColors[i][3], myColors[i][4], myColors[i][5]); inRange(imgHSV, lower, upper, mask); //imshow(to_string(i), mask); Point myPoint = getContours(mask); //根据mask得到检测到当前颜色矩形框的上边界中点坐标 if (myPoint.x != 0 && myPoint.y != 0) { newPoints.push_back({ myPoint.x, myPoint.y, i }); //得到当前帧检测颜色的目标点 } } return newPoints; } void drawOnCanvas(vector<vector<int>> newPoints, vector<Scalar> myColorValues) { for (int i = 0; i < newPoints.size(); i++) { circle(img, Point(newPoints[i][0], newPoints[i][1]), 10, myColorValues[newPoints[i][2]], FILLED); } } int main() { VideoCapture cap(0); while (true) { cap.read(img); newPoints = findColor(img); drawOnCanvas(newPoints, myColorValues); imshow("Image", img); waitKey(1); } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
Project2 文档扫描
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> using namespace cv; using namespace std; Mat imgOriginal, imgGray, imgBlur,imgCanny, imgThre, imgDil, imgErode, imgWarp, imgCrop; vector<Point> initialPoints, docPoints; float w = 420, h = 596; Mat preProcessing(Mat img) { cvtColor(img, imgGray, COLOR_BGR2GRAY); GaussianBlur(imgGray, imgBlur, Size(3, 3), 3, 0); Canny(imgBlur, imgCanny, 25, 75); Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3)); dilate(imgCanny, imgDil, kernel); //erode(imgDil, imgErode, kernel); return imgDil; } vector<Point> getContours(Mat imgDil) { vector<vector<Point>> contours; //轮廓数据 vector<Vec4i> hierarchy; findContours(imgDil, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE); //通过预处理的二值图像找到所有轮廓contours //drawContours(img, contours, -1, Scalar(255, 0, 255), 2); //绘制所有轮廓(不滤除噪声) vector<vector<Point>> conPoly(contours.size()); vector<Point> biggest; int maxArea = 0; for (int i = 0; i < contours.size(); i++) { double area = contourArea(contours[i]); //计算每个轮廓区域 cout << area << endl; if (area > 1000) //过滤噪声 { //找轮廓的近似多边形或曲线 double peri = arcLength(contours[i], true); approxPolyDP(contours[i], conPoly[i], 0.02 * peri, true); if (area > maxArea && conPoly[i].size() == 4) { //drawContours(imgOriginal, conPoly, i, Scalar(255, 0, 255), 5); //绘制滤除噪声后的所有轮廓 biggest = { conPoly[i][0], conPoly[i][1], conPoly[i][2], conPoly[i][3] }; maxArea = area; } } } return biggest; //返回最大轮廓四个点的坐标 } void drawPoints(vector<Point> points, Scalar color) { for (int i = 0; i < points.size(); i++) { circle(imgOriginal, points[i], 10, color, FILLED); putText(imgOriginal, to_string(i), points[i], FONT_HERSHEY_PLAIN, 4, color, 4); } } vector<Point> reorder(vector<Point> points) { vector<Point> newPoints; vector<int> sumPoints, subPoints; for (int i = 0; i < 4; i++) { sumPoints.push_back(points[i].x + points[i].y); subPoints.push_back(points[i].x - points[i].y); } newPoints.push_back(points[min_element(sumPoints.begin(), sumPoints.end()) - sumPoints.begin()]); //0 newPoints.push_back(points[max_element(subPoints.begin(), subPoints.end()) - subPoints.begin()]); //1 newPoints.push_back(points[min_element(subPoints.begin(), subPoints.end()) - subPoints.begin()]); //2 newPoints.push_back(points[max_element(sumPoints.begin(), sumPoints.end()) - sumPoints.begin()]); //3 return newPoints; } Mat getWarp(Mat img, vector<Point> points, float w, float h) { Point2f src[4] = { points[0], points[1], points[2], points[3] }; Point2f dst[4] = { {0.0f, 0.0f}, {w, 0.0f}, {0.0f, h}, {w, h} }; Mat matrix = getPerspectiveTransform(src, dst); warpPerspective(img, imgWarp, matrix, Point(w, h)); return imgWarp; } int main() { string path = "Resources/paper.jpg"; imgOriginal = imread(path); //resize(imgOriginal, imgOriginal, Size(), 0.5, 0.5); //Preprocessing imgThre = preProcessing(imgOriginal); //Get Contours - Biggest initialPoints = getContours(imgThre); //drawPoints(initialPoints, Scalar(0, 0, 255)); docPoints = reorder(initialPoints); //drawPoints(docPoints, Scalar(0, 255, 0)); //Warp imgWarp = getWarp(imgOriginal, docPoints, w, h); //Crop int cropValue = 5; Rect roi(cropValue, cropValue, w - (2 * cropValue), h - (2 * cropValue)); imgCrop = imgWarp(roi); imshow("Image", imgOriginal); imshow("Image Dilation", imgThre); imshow("Image Warp", imgWarp); imshow("Image Crop", imgCrop); waitKey(0); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128


Project3 车牌检测
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <opencv2/objdetect.hpp> #include <iostream> using namespace cv; using namespace std; int main() { VideoCapture cap(0); Mat img; CascadeClassifier plateCascade; plateCascade.load("Resources/haarcascade_russian_plate_number.xml"); if (plateCascade.empty()) { cout << "XML file not loaded" << endl; } vector<Rect> plates; while (true) { cap.read(img); plateCascade.detectMultiScale(img, plates, 1.1, 10); for (int i = 0; i < plates.size(); i++) { Mat imgCrop = img(plates[i]); imshow(to_string(i), imgCrop); imwrite("D:\\VS2019Projects\\chapter2\\chapter2\\resources\\Plates\\1.png", imgCrop); rectangle(img, plates[i].tl(), plates[i].br(), Scalar(255, 0, 255), 3); } imshow("Image", img); waitKey(1); } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
题外话
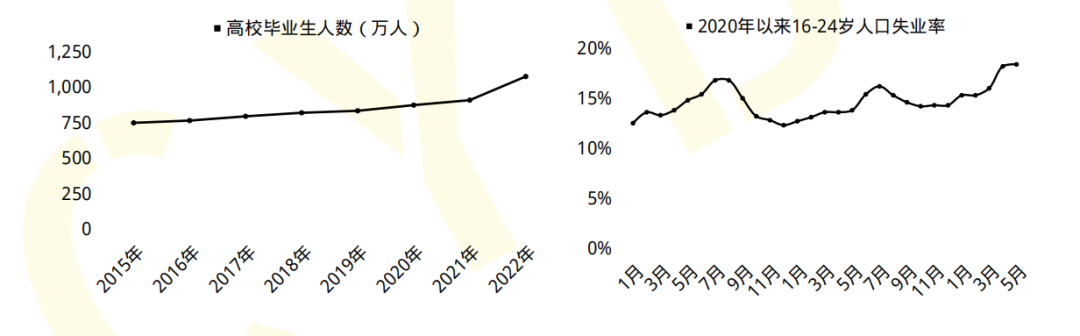
初入计算机行业的人或者大学计算机相关专业毕业生,很多因缺少实战经验,就业处处碰壁。下面我们来看两组数据:
-
2023届全国高校毕业生预计达到1158万人,就业形势严峻;
-
国家网络安全宣传周公布的数据显示,到2027年我国网络安全人员缺口将达327万。
一方面是每年应届毕业生就业形势严峻,一方面是网络安全人才百万缺口。
6月9日,麦可思研究2023年版就业蓝皮书(包括《2023年中国本科生就业报告》《2023年中国高职生就业报告》)正式发布。
2022届大学毕业生月收入较高的前10个专业
本科计算机类、高职自动化类专业月收入较高。2022届本科计算机类、高职自动化类专业月收入分别为6863元、5339元。其中,本科计算机类专业起薪与2021届基本持平,高职自动化类月收入增长明显,2022届反超铁道运输类专业(5295元)排在第一位。
具体看专业,2022届本科月收入较高的专业是信息安全(7579元)。对比2018届,电子科学与技术、自动化等与人工智能相关的本科专业表现不俗,较五年前起薪涨幅均达到了19%。数据科学与大数据技术虽是近年新增专业但表现亮眼,已跻身2022届本科毕业生毕业半年后月收入较高专业前三。五年前唯一进入本科高薪榜前10的人文社科类专业——法语已退出前10之列。

“没有网络安全就没有国家安全”。当前,网络安全已被提升到国家战略的高度,成为影响国家安全、社会稳定至关重要的因素之一。
网络安全行业特点
1、就业薪资非常高,涨薪快 2021年猎聘网发布网络安全行业就业薪资行业最高人均33.77万!
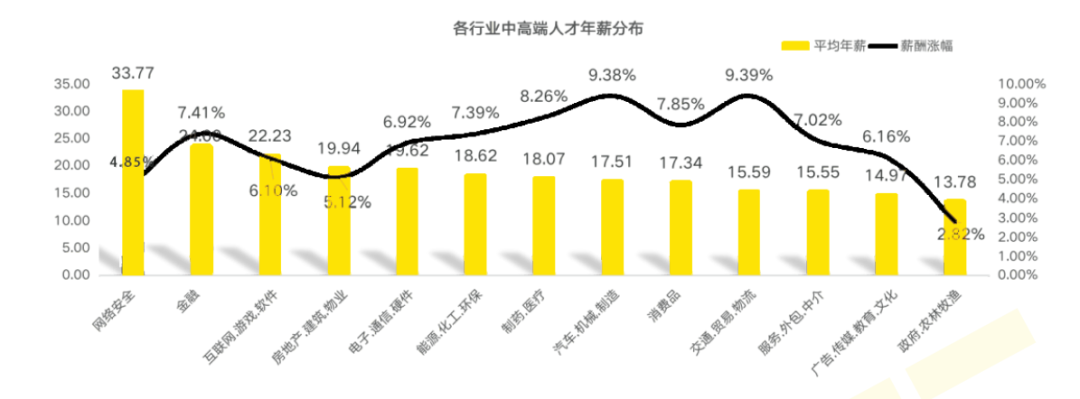
2、人才缺口大,就业机会多
2019年9月18日《中华人民共和国中央人民政府》官方网站发表:我国网络空间安全人才 需求140万人,而全国各大学校每年培养的人员不到1.5W人。猎聘网《2021年上半年网络安全报告》预测2027年网安人才需求300W,现在从事网络安全行业的从业人员只有10W人。
行业发展空间大,岗位非常多
网络安全行业产业以来,随即新增加了几十个网络安全行业岗位︰网络安全专家、网络安全分析师、安全咨询师、网络安全工程师、安全架构师、安全运维工程师、渗透工程师、信息安全管理员、数据安全工程师、网络安全运营工程师、网络安全应急响应工程师、数据鉴定师、网络安全产品经理、网络安全服务工程师、网络安全培训师、网络安全审计员、威胁情报分析工程师、灾难恢复专业人员、实战攻防专业人员…
职业增值潜力大
网络安全专业具有很强的技术特性,尤其是掌握工作中的核心网络架构、安全技术,在职业发展上具有不可替代的竞争优势。
随着个人能力的不断提升,所从事工作的职业价值也会随着自身经验的丰富以及项目运作的成熟,升值空间一路看涨,这也是为什么受大家欢迎的主要原因。
从某种程度来讲,在网络安全领域,跟医生职业一样,越老越吃香,因为技术愈加成熟,自然工作会受到重视,升职加薪则是水到渠成之事。
黑客&网络安全如何学习
今天只要你给我的文章点赞,我私藏的网安学习资料一样免费共享给你们,来看看有哪些东西。
1.学习路线图
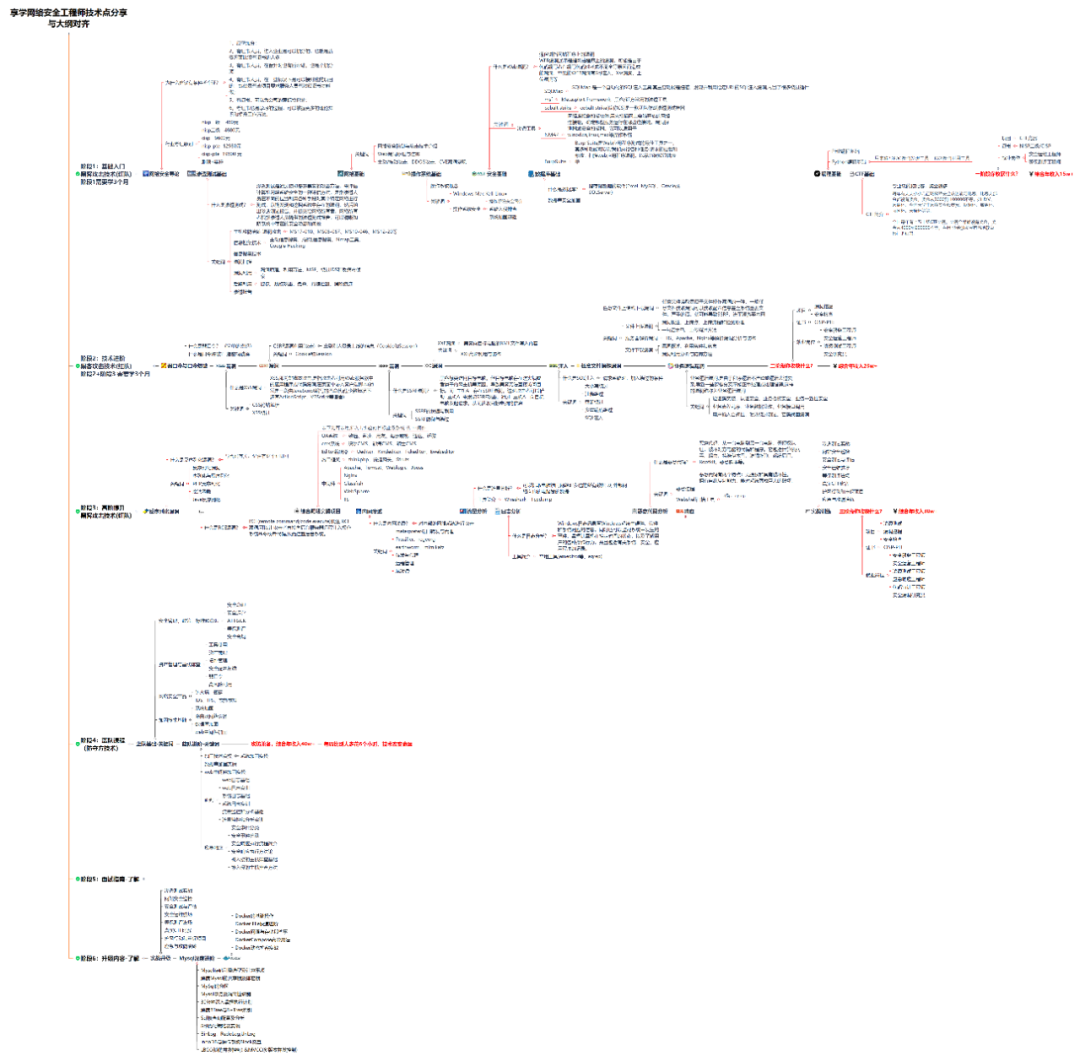
攻击和防守要学的东西也不少,具体要学的东西我都写在了上面的路线图,如果你能学完它们,你去就业和接私活完全没有问题。
2.视频教程
网上虽然也有很多的学习资源,但基本上都残缺不全的,这是我自己录的网安视频教程,上面路线图的每一个知识点,我都有配套的视频讲解。
内容涵盖了网络安全法学习、网络安全运营等保测评、渗透测试基础、漏洞详解、计算机基础知识等,都是网络安全入门必知必会的学习内容。
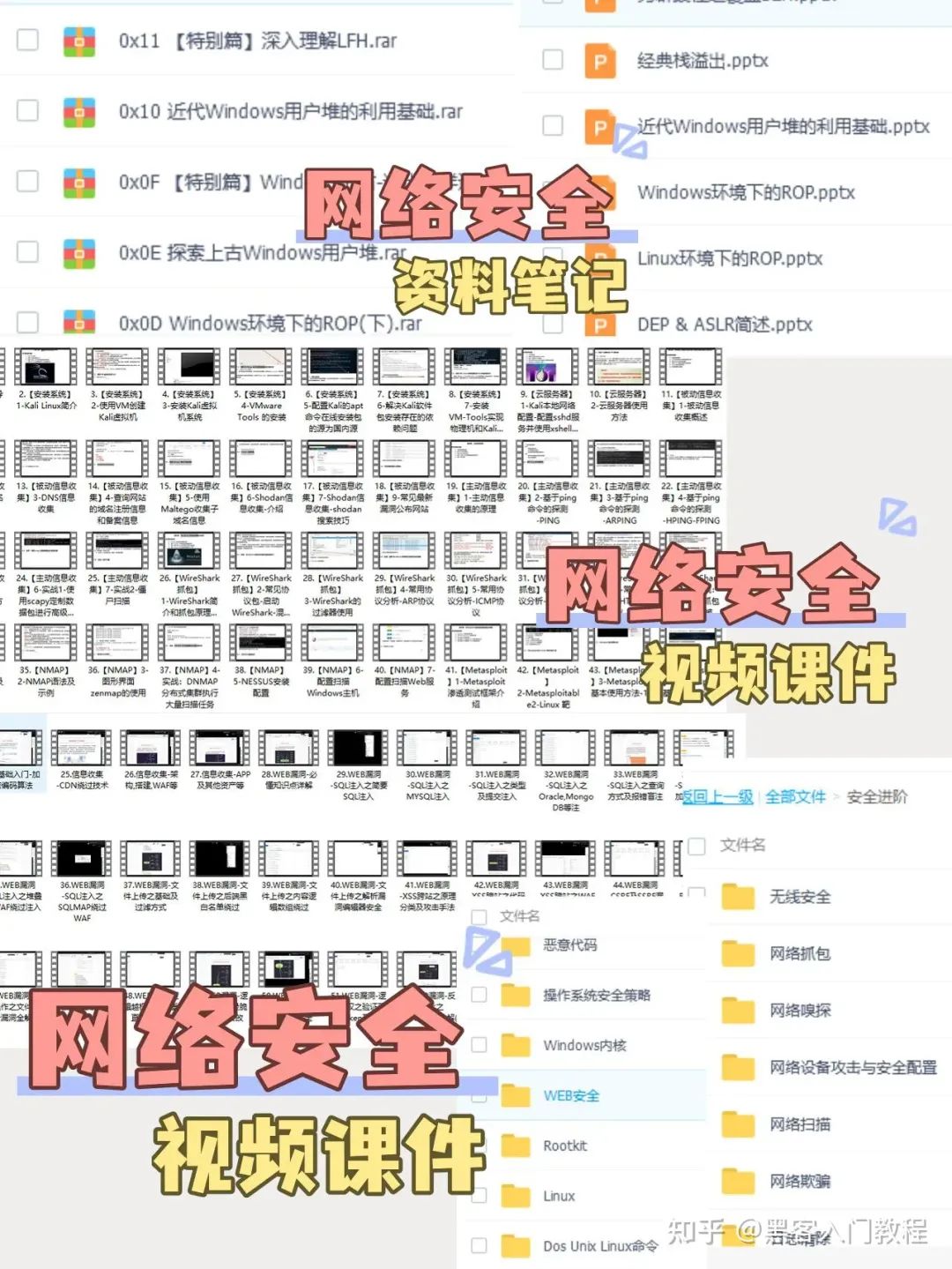
(都打包成一块的了,不能一一展开,总共300多集)
因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
CSDN大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享
3.技术文档和电子书
技术文档也是我自己整理的,包括我参加大型网安行动、CTF和挖SRC漏洞的经验和技术要点,电子书也有200多本,由于内容的敏感性,我就不一一展示了。
因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
CSDN大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享
4.工具包、面试题和源码
“工欲善其事必先利其器”我为大家总结出了最受欢迎的几十款款黑客工具。涉及范围主要集中在 信息收集、Android黑客工具、自动化工具、网络钓鱼等,感兴趣的同学不容错过。
还有我视频里讲的案例源码和对应的工具包,需要的话也可以拿走。
因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
CSDN大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享
最后就是我这几年整理的网安方面的面试题,如果你是要找网安方面的工作,它们绝对能帮你大忙。
这些题目都是大家在面试深信服、奇安信、腾讯或者其它大厂面试时经常遇到的,如果大家有好的题目或者好的见解欢迎分享。
参考解析:深信服官网、奇安信官网、Freebuf、csdn等
内容特点:条理清晰,含图像化表示更加易懂。
内容概要:包括 内网、操作系统、协议、渗透测试、安服、漏洞、注入、XSS、CSRF、SSRF、文件上传、文件下载、文件包含、XXE、逻辑漏洞、工具、SQLmap、NMAP、BP、MSF…

因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取


