
- 1安卓手机部署ubuntu的lxc容器,并安装好dockerd_lxc android
- 2华为Android更改文件位置,华为C8812改变Android手机软件安装位置方法
- 3Error:Unknown host 'services.gradle.org'. You may need to adjust the proxy settings in Gradle. Error
- 4vue路由跳转及其ajax请求,vue路由切换时取消之前的所有请求操作
- 5vue实现文章目录_vue word帮助文档查看 带目录
- 6Sora何时开放使用?付费课程已上线(sora什么时候开放使用 )_sora什么时候能用
- 7ssm-房屋租赁系统_在房屋租赁管理系统中有如下三个关系模式一房屋租户三租赁订单是完成如下查询
- 8「软件」2.0时代已经到来,你需要这样的开发工具_paddle serving paddle inference
- 9华为matePad11平板mate PAD PRO 11无法激活设备怎么解锁忘记的密码重置免拆机解除方法教程步骤_华为平板mate11强制解锁跳过激活锁怎么办
- 10bit-band_bit.band
激光SLAM框架总结
赞
踩
一、激光SLAM简介
基于激光雷达的同时定位与地图构建技术(simultaneous localization and mapping, SLAM)以其准确测量障碍点的角度与距离、 无须预先布置场景、可融合多传感器、 在光线较差环境工作、 能够生成便于导航的环境地图等优势,成为目前定位方案中不可或缺的新技术。
激光 SLAM 任务是搭载激光雷达的主体于运动中估计自身的位姿,同时建立周围的环境地图。而准确的定位需要精确的地图,精确的地图则来自于准确的定位,定位侧重自身位姿估计,建图侧重外部环境重建。
SLAM系统一般分为五个模块:传感器数据、视觉里程计、后端、建图及回环检测。
传感器数据:主要用于采集实际环境中的各类型原始数据。包括激光扫描数据、视频图像数据、点云数据等。
视觉里程计:主要用于不同时刻间移动目标相对位置的估算。包括特征匹配、直接配准等算法的应用。
后端:主要用于优化视觉里程计带来的累计误差。包括滤波器、图优化等算法应用。
建图:用于三维地图构建。
回环检测:主要用于空间累积误差消除
SLAM工作的主要流程为:
传感器读取数据后,视觉里程计估计两个时刻的相对运动(Ego-motion),后端处理视觉里程计估计结果的累积误差,建图则根据前端与后端得到的运动轨迹来建立地图,回环检测考虑了同一场景不同时刻的图像,提供了空间上约束来消除累积误差。
激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。
激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。激光SLAM理论研究也相对成熟,落地产品更丰富。
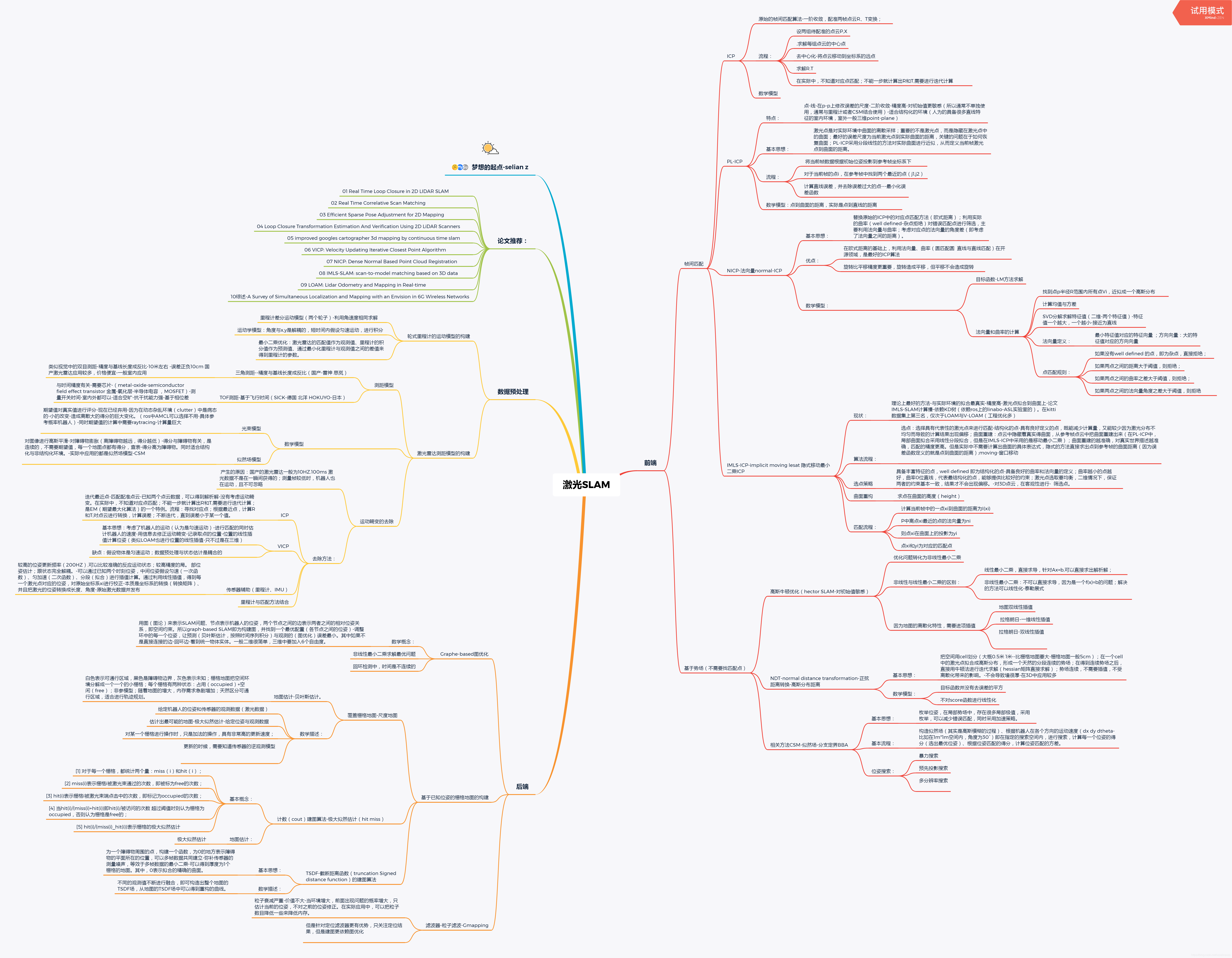
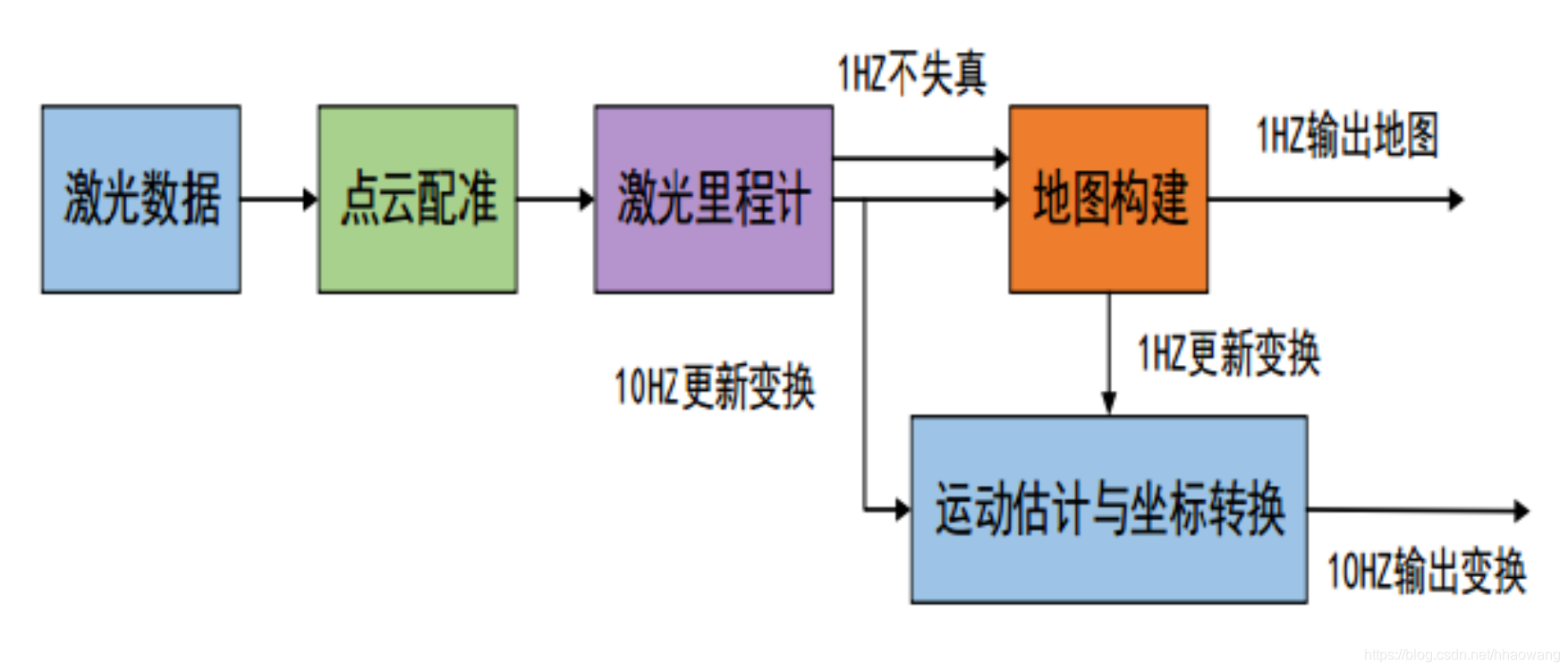
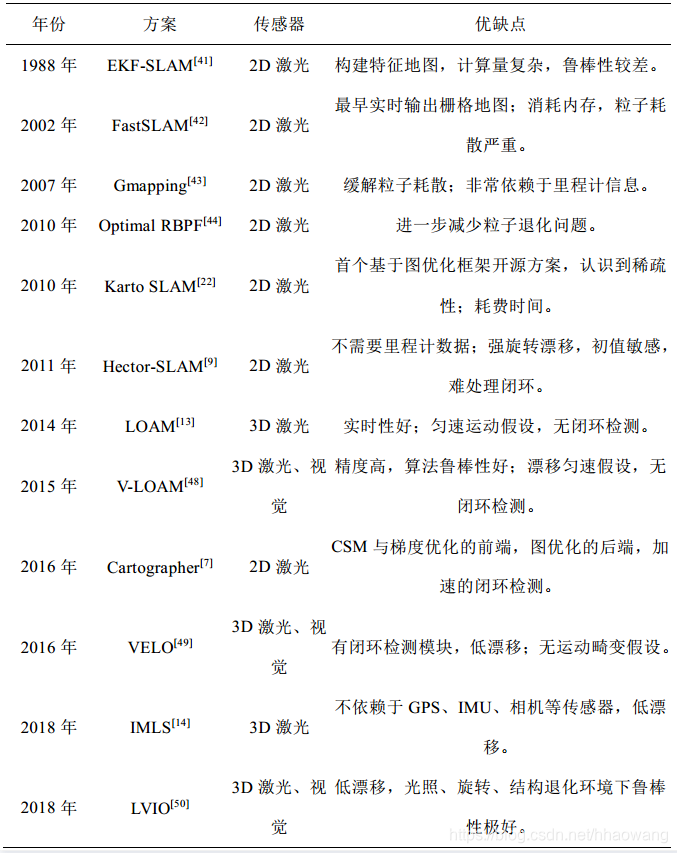
二、激光SLAM(二维)框架整理
三、开源激光SLAM方案
根据所采用的凸优化框架, 激光 SLAM 可分为两大类:基于滤波器(Filter-based)和基于图优化(Graph-based)的激光 SLAM。
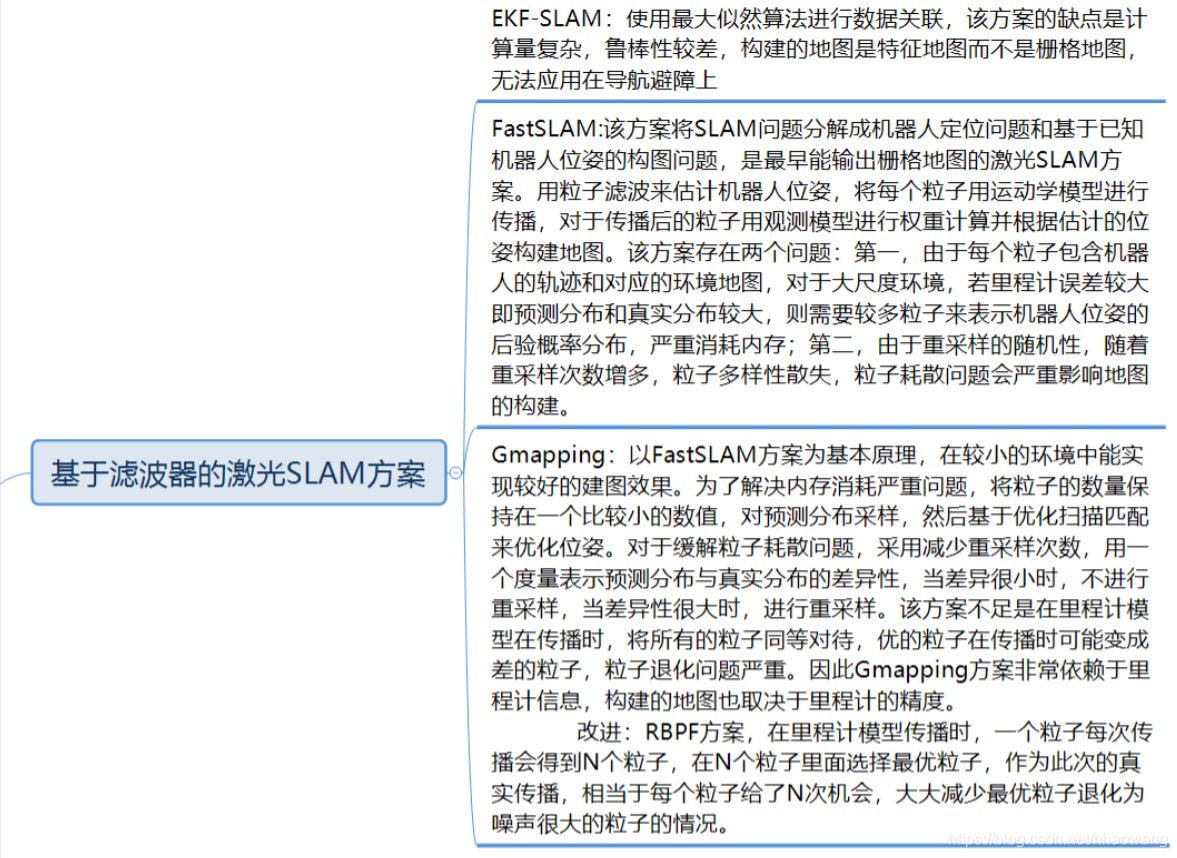
3.1 基于滤波器的激光SLAM方案
3.2 基于图优化激光SLAM方案
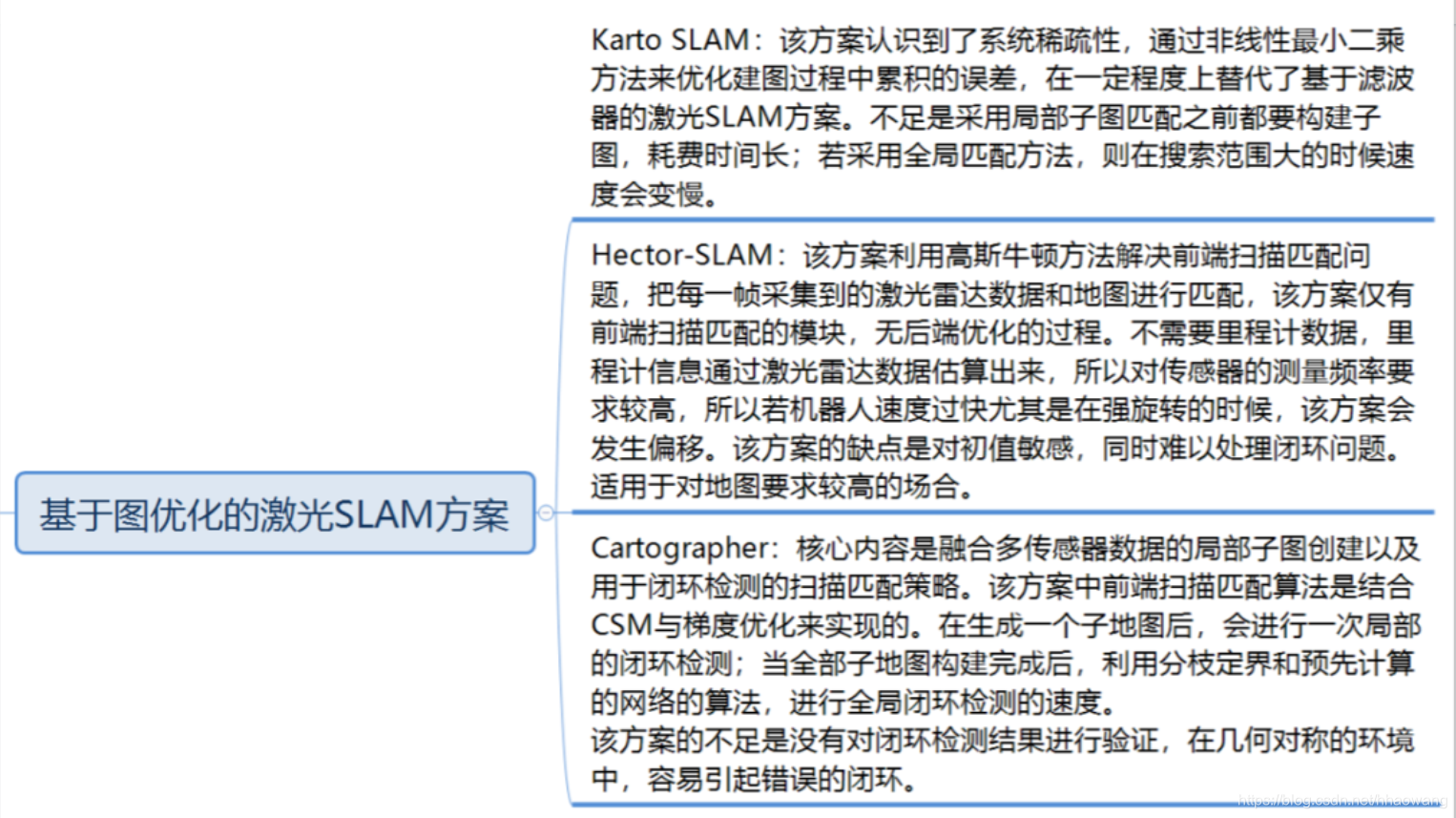
在真实环境中,由于周围特征点能够辅助机器人定位和建图,构建的栅格地图会比仿真环境中效果好。Hector-SLAM 方案的缺点是对初值敏感,同时难以处理闭环问题。 Hector-SLAM 的整体建图精度高于Gmapping,但对参数配置要求较高。Hector -SLAM 适用于对地图要求较高的场合, Gmapping 易用性更好。
3.3 3D 激光SLAM
在 3D 激光 SLAM 领域中, 由 Zhang J 等人提出的LOAM 方案,利用 3D 激光雷达采集数据, 进行基于特征点的扫描匹配, 利用非线性优化方法进行运动估计, 激光里程计的输出与地图进行匹配, 包括直线匹配和平面匹配, 无回环检测模块,点面特征还不够可靠。
三、小结
Gmapping可以实时构建室内地图,在构建小场景地图所需的计算量较小且精度较高。相比Hector SLAM对激光雷达频率要求低、鲁棒性高(Hector 在机器人快速转向时很容易发生错误匹配,建出的地图发生错位,原因主要是优化算法容易陷入局部最小值);而相比Cartographer在构建小场景地图时,Gmapping不需要太多的粒子并且没有回环检测因此计算量小于Cartographer而精度并没有差太多。Gmapping有效利用了车轮里程计信息,这也是Gmapping对激光雷达频率要求低的原因:里程计可以提供机器人的位姿先验。而Hector和Cartographer的设计初衷不是为了解决平面移动机器人定位和建图,Hector主要用于救灾等地面不平坦的情况,因此无法使用里程计。而Cartographer是用于手持激光雷达完成SLAM过程,也就没有里程计可以用。
随着场景增大所需的粒子增加,因为每个粒子都携带一幅地图,因此在构建大地图时所需内存和计算量都会增加。因此不适合构建大场景地图。并且没有回环检测,因此在回环闭合时可能会造成地图错位,虽然增加粒子数目可以使地图闭合但是以增加计算量和内存为代价。所以不能像Cartographer那样构建大的地图,虽然论文生成几万平米的地图,但实际我们使用中建的地图没有几千平米时就会发生错误。Gmapping和Cartographer一个是基于滤波框架SLAM另一个是基于优化框架的SLAM,两种算法都涉及到时间复杂度和空间复杂度的权衡。Gmapping牺牲空间复杂度保证时间复杂度,这就造成Gmapping不适合构建大场景地图,试想一下你要构建200乘200米的环境地图,栅格分辨率选择5厘米,每个栅格占用一字节内存,那么一个粒子携带的地图就需要16M内存,如果是100个粒子就需要1.6G内存。如果地图变成500乘500米,粒子数为200个,可能电脑就要崩溃了。翻看Cartographer算法,优化相当于地图中只用一个粒子,因此存储空间比较Gmapping会小很多倍,但计算量大,一般的笔记本很难跑出来好的地图,甚至根本就跑不动。优化图需要复杂的矩阵运算,这也是谷歌为什么还有弄个ceres库出来的原因。


