
热门标签
热门文章
- 1树莓派配置环境变量,解决No such file or directory的错误提示_树莓派vncunable to open i2c device: no such file or d
- 2洛谷p3817 小A的糖果
- 3C语言easyx飞机大战源码+素材(大屏版)_易语言 飞机大战
- 4基于SpringBoot的农产品销售小程序平台的设计与实现_基于springboot粮食加工订单
- 5Word Tokenization
- 6浅析自动编码器(自编码器 Autoencoder)_深度学习 coding decoding
- 7抖音商品详情数据接口python_python 获取抖音商户信息
- 8MATLAB非线性规划优化问题_带约束的非线性优化算法代码
- 9毕业设计:基于卷积神经网络的图像分类系统 python人工智能_基于卷积神经网络的图像分类系统研究研究或设计的目的和意义:
- 10Dual Contrastive Learning: Text Classification via Label-Aware Data Augmentation 阅读笔记_dual-pool contrastive learning
当前位置: article > 正文
PSINS函数解析之imuerrset函数(零偏和随机游走部分)
作者:小小林熬夜学编程 | 2024-03-30 15:44:33
赞
踩
imuerrset
#imuerr = imuerrset(0.03, 100, 0.001, 5);
以该代码为例子 设置陀螺零偏为0.03deg/h 加速度计零偏为100ug,角度随机游走为0.001deg/sqrt(h),加速度计随机游走为5ug/sqrt(hz).
将角度相关量进行单位换算:
陀螺零偏换算如下:(0.03*pi/180)/3600s=1.4544e-07(rad/s)
角度随机游走换算如下:(0.001*pi/180)/sqrt(3600s)=2.9089e-07(rad/sqrt(s));
加速度计零偏换算为下:100*1e-06*9.7803267714m/s^2=9.7803267714*1e-04(m/s^2);
加速度计随机游走换算如下:5*1e-06*9.7803267714(m/s^2/sqrt(hz))=4.8902e-05(m/s/sqrt(s));
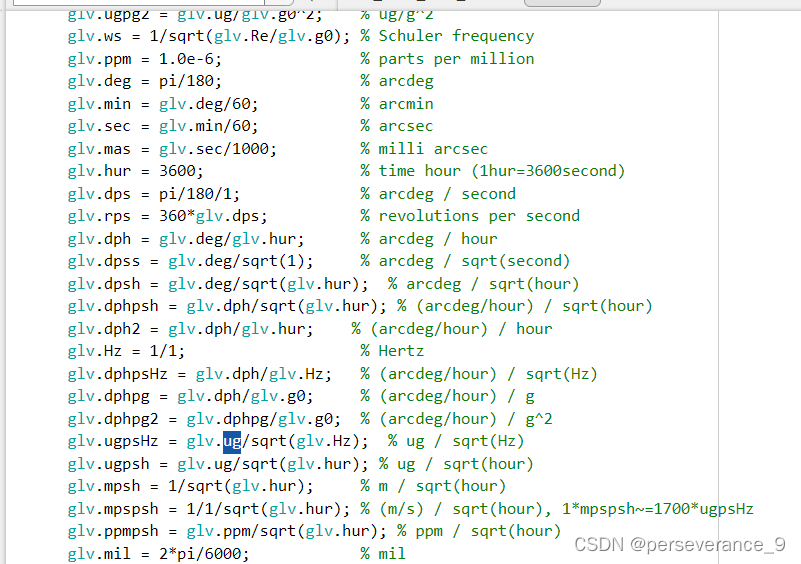

在误差设置的代码如下(注意随机游走的设置,乘以sqrt(0.1s)后再乘随机数可得整个随机游走序列:

![]()
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

