
热门标签
热门文章
- 1【论文解析】Transformer浅析(Attention is All You Need)_transformer做特征提取,泛化能力特别弱怎么办
- 2SpringCloud(微服务) - 黑马程序员_黑马程序员 springclound
- 3获取详情API接口(抖音)_抖音api接口文档
- 4python数据清洗的三个常用的处理方式!_python数据清洗csv文件中的空格
- 5向ArcGIS中导入tbx工具箱_arcgis如何加载tbx
- 62023彩虹易支付最新原版安装教程_彩虹易支付2023最新版
- 7Android图片操作-保存图片到SD卡_安卓stdio8上传图片到sdcard
- 8Nacos源码NacosAutoServiceRegistration
- 9SpringBoot集成websocket(2)|(websocket服务端实现以及websocket中转实现)
- 10Python基础入门 (六Sklearn常规用法)_python sklearn
当前位置: article > 正文
机器人在笛卡尔空间和关节空间的多项式轨迹规划以及matlab代码(三次、五次、七次)_matlab利用三次多项式规划出关节角运动轨迹
作者:小小林熬夜学编程 | 2024-04-07 19:54:00
赞
踩
matlab利用三次多项式规划出关节角运动轨迹
三次多项式轨迹规划:
三次多项式轨迹规划就是s(t)相对于时间t的变化满足三次多项式变化,其表达式如下:

如前文所述:t的取值范围是[0,T],s(t)的取值范围是[0,1], 又因为初始速度和末速度都为0,所以:
![]()
![]()
![]()
S(t)的一阶导数表达式为:
![]()
从而可以计算出对应的系数:

将系数带入到上面的三次多项式,可得到

再将上式代入到路径表达式,即可得到完整的轨迹规划表达式,如下所示:
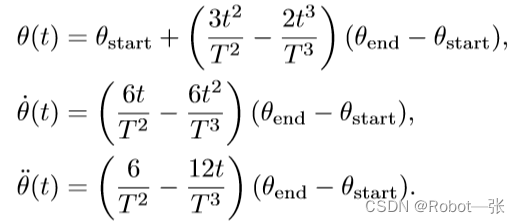
其中,最大的关节速度在![]() 时刻到达,其数值为:
时刻到达,其数值为:

最大的关节加速度和关节减速度在![]() 和
和![]() ,其中:
,其中:

关节空间三次多项式轨迹规划:
- TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
- TH2=[90,54,3,60,80,40,60];
- T=1;%定以一个时间,即从TH1到TH2的总时间。
- TH=[];
- TH_yijie=[];
- TH_erjie=[];
- TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
- for t=0:0.001:T
- th=TH1+(TH2-TH1)*(3*t^2/T^2-2*t^3/T^3);%角度和时间变化关系
- th_yijie=(TH2-TH1)*(6*t/T^2-6*t^2/T^3);%角速度和时间变化关系
- th_erjie=(TH2-TH1)*(6/T^2-12*t/T^3);%角加速度和时间变化关系
- TH=[TH,th'];
- TH_yijie=[TH_yijie,th_yijie'];
- TH_erjie=[TH_erjie,th_erjie'];
- TT=[TT,t];
- end
- TH=TH';%矩阵转置
- TH_yijie=TH_yijie';
- TH_erjie=TH_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
- grid on;
- fig2=figure;
- plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
- grid on;

笛卡尔空间三次多项式轨迹规划:
- A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
- B=[90,54,3];
- T=1;%定义一个时间,即从A到B的总时间。
- X=[];
- X_yijie=[];
- X_erjie=[];
- TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
- for t=0:0.001:T
- x=A+(B-A)*(3*t^2/T^2-2*t^3/T^3);%角度和时间变化关系
- x_yijie=(B-A)*(6*t/T^2-6*t^2/T^3);%角速度和时间变化关系
- x_erjie=(B-A)*(6/T^2-12*t/T^3);%角加速度和时间变化关系
- X=[X,x'];
- X_yijie=[X_yijie,x_yijie'];
- X_erjie=[X_erjie,x_erjie'];
- TT=[TT,t];
- end
- X=X';%矩阵转置
- X_yijie=X_yijie';
- X_erjie=X_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
- grid on;
- fig2=figure;
- plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
- grid on;
五次多项式轨迹规划:
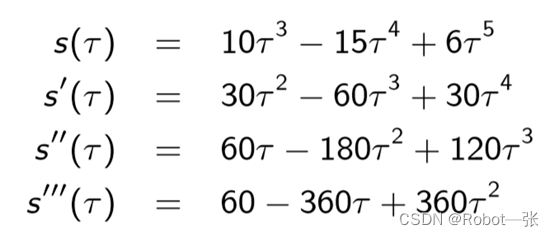
五次多项式轨迹规划就是s(t)相对于时间t的变化满足五次多项式变化,其表达式如下:
![]()
其中:

求出系数如下:
![]()
所以其运动方程如下:
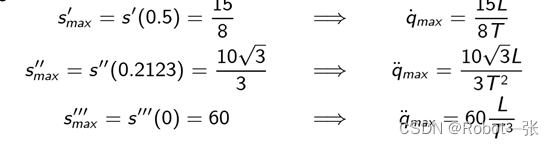
各个变量的最值如下:
关节空间五次多项式轨迹规划:
- TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
- TH2=[90,54,3,60,80,40,60];
- T=1;%定以一个时间,即从TH1到TH2的总时间。
- TH=[];
- TH_yijie=[];
- TH_erjie=[];
- TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
- for t=0:0.001:T
- th=TH1+(TH2-TH1)*(10*(t/T)^3-15*(t/T)^4+6*(t/T)^5);%角度和时间变化关系
- th_yijie=(TH2-TH1)*(30*(t/T)^2-60*(t/T)^3+30*(t/T)^4);%角速度和时间变化关系
- th_erjie=(TH2-TH1)*(60*(t/T)-180*(t/T)^2+120*(t/T)^3);%角加速度和时间变化关系
- TH=[TH,th'];
- TH_yijie=[TH_yijie,th_yijie'];
- TH_erjie=[TH_erjie,th_erjie'];
- TT=[TT,t];
- end
- TH=TH';%矩阵转置
- TH_yijie=TH_yijie';
- TH_erjie=TH_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
- grid on;
- fig2=figure;
- plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
- grid on;
笛卡尔空间五次多项式轨迹规划:
- A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
- B=[90,54,3];
- T=1;%定义一个时间,即从A到B的总时间。
- X=[];
- X_yijie=[];
- X_erjie=[];
- TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
- for t=0:0.001:T
- x=A+(B-A)*(10*(t/T)^3-15*(t/T)^4+6*(t/T)^5);%角度和时间变化关系
- x_yijie=(B-A)*(30*(t/T)^2-60*(t/T)^3+30*(t/T)^4);%角速度和时间变化关系
- x_erjie=(B-A)*(60*(t/T)-180*(t/T)^2+120*(t/T)^3);%角加速度和时间变化关系
- X=[X,x'];
- X_yijie=[X_yijie,x_yijie'];
- X_erjie=[X_erjie,x_erjie'];
- TT=[TT,t];
- end
- X=X';%矩阵转置
- X_yijie=X_yijie';
- X_erjie=X_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
- grid on;
- fig2=figure;
- plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
- grid on;
七次多项式轨迹规划:
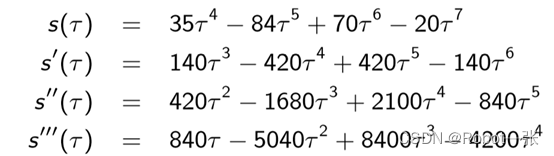
五次多项式轨迹规划就是s(t)相对于时间t的变化满足五次多项式变化,其表达式如下:

其中:

求出系数如下:
![]()
所以其运动方程如下:
各个变量的最值如下:

关节空间七次多项式轨迹规划:
- TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
- TH2=[90,54,3,60,80,40,60];
- T=1;%定以一个时间,即从TH1到TH2的总时间。
- TH=[];
- TH_yijie=[];
- TH_erjie=[];
- TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
- for t=0:0.001:T
- th=TH1+(TH2-TH1)*(35*(t/T)^4-84*(t/T)^5+70*(t/T)^6-20*(t/T)^7);%角度和时间变化关系
- th_yijie=(TH2-TH1)*(140*(t/T)^3-420*(t/T)^4+420*(t/T)^5-140*(t/T)^6);%角速度和时间变化关系
- th_erjie=(TH2-TH1)*(420*(t/T)^2-1680*(t/T)^3+2100*(t/T)^4-840*(t/T)^5);%角加速度和时间变化关系
- TH=[TH,th'];
- TH_yijie=[TH_yijie,th_yijie'];
- TH_erjie=[TH_erjie,th_erjie'];
- TT=[TT,t];
- end
- TH=TH';%矩阵转置
- TH_yijie=TH_yijie';
- TH_erjie=TH_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
- grid on;
- fig2=figure;
- plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
- grid on;
笛卡尔空间七次多项式轨迹规划:
- A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
- B=[90,54,3];
- T=1;%定义一个时间,即从A到B的总时间。
- X=[];
- X_yijie=[];
- X_erjie=[];
- TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
- for t=0:0.001:T
- x=A+(B-A)*(35*(t/T)^4-84*(t/T)^5+70*(t/T)^6-20*(t/T)^7);%角度和时间变化关系
- x_yijie=(B-A)*(140*(t/T)^3-420*(t/T)^4+420*(t/T)^5-140*(t/T)^6);%角速度和时间变化关系
- x_erjie=(B-A)*(420*(t/T)^2-1680*(t/T)^3+2100*(t/T)^4-840*(t/T)^5);%角加速度和时间变化关系
- X=[X,x'];
- X_yijie=[X_yijie,x_yijie'];
- X_erjie=[X_erjie,x_erjie'];
- TT=[TT,t];
- end
- X=X';%矩阵转置
- X_yijie=X_yijie';
- X_erjie=X_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
- grid on;
- fig2=figure;
- plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
- grid on;
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/380259
推荐阅读
相关标签

