
- 1图数据库Neo4j学习五渲染图数据库neo4jd3
- 2python如何读取mat文件可视化_python 数据分析--数据可视化工具matplotlib
- 3Diffusion Model_gan diffusion区别
- 4Ubuntu20.04上安装RabbitMQ_ubuntu如何安装3.8版本的rabbitmq
- 5Stable Diffusion XL webui tagger 插件Linux安装(保姆级教程)_stable-diffusion-webui-wd14-tagger 没有tagger
- 6java中对Byte字符数组定长截取的方法_java 字节数组从第三位截取
- 7xilinx原语及bank简介_fpga bank
- 8Python实现《植物大战僵尸》游戏_python编程朱武大战僵尸
- 9MySQL数据库:零售业管理E-R图_情境1:客户直接订购商品,商家发货,随即开具发票。 e-r图:
- 10【AI视野·今日Robot 机器人论文速览 第七十六期】Fri, 12 Jan 2024
数学建模(三)整数规划
赞
踩
视频推荐:B站_数学建模老哥
目录
一、整数规划基本原理
数学规划中的变量(部分或全部)限制为整数时,称为整数规划。若在线性规划模型中,变量限制为整数,则称为整数线性规划。目前所流行的求解整数规划的方法,往往只适用于整数线性规划。目前还没有一种方法能有效地求解一切整数规划。
1.1 整数规划的分类
(1)变量全限制为整数时,称为纯(完全)整数规划。
(2)变量部分限制为整数的,称为混合整数规划。
(3)变量取值要么为0要么为1,称为0-1规划。
1.2 整数规划的特点
1. 原线性规划有最优解,当自变量限制为整数后,其整数规划解出现下述情况:
(1)原线性规划最优解全是整数,则整数规划最优解与线性规划最优解一致。
(2)整数规划可能不存在可行解。
(3)有可行解(当然就存在最优解),但最优解值变差。
2. 整数规划最优解不能按照实数最优解简单取整而获得。
1.3 案例
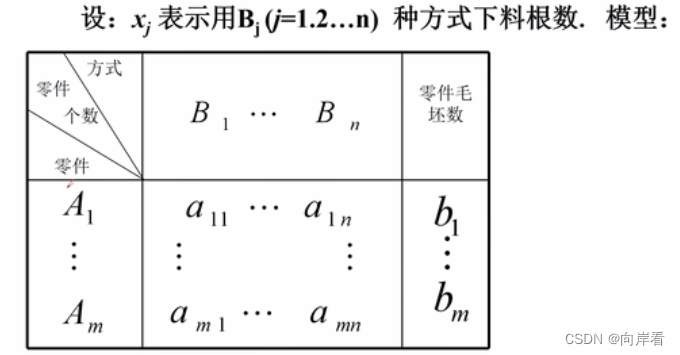
合理下料问题:
设用某型号的圆钢下零件A1,A2...,Am的毛坯。在一根圆钢上下料的方式有B1,B2,... Bn种,每种下料方式可以得到各种零件的毛坯数以及每种零件的需要量,如表所示。问怎样安排下料方式,使得即满足需要,所用的原材料又最少?
如表所示:
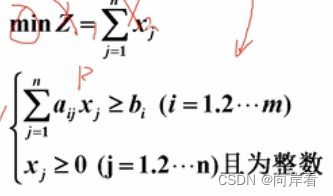
模型:
其中,xj表示用Bj种方式下料根数,aij为每种下料方式可以得到各种零件的毛坯数,bi每种零件的需要量。
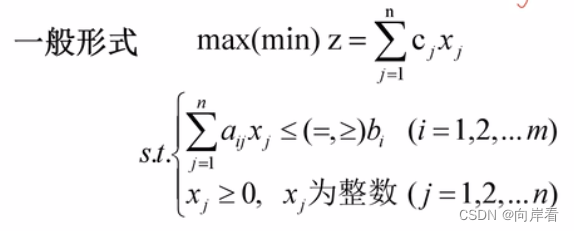
1.4 整数规划的数学模型一般形式
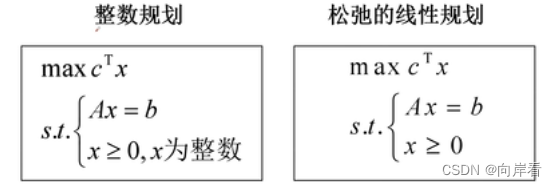
另外补充: 整数规划与松弛的线性规划之间的关系。
不难看出两者之间的关系。
二、整数线性规划的求解方法
从数学模型上看整数规划似乎是线性规划的一种特殊形式,求解只需在线性规划的基础上,通过舍入取整,寻求满足整数要求的解即可。但实际上两者却有很大的不同,通过舍入得到的解(整数)也不一定就是最优解,有时甚至不能保证所得到的解是整数可行解。
2.1 分枝定界法
分枝定界法(branch and bound)是一种求解整数规划问题的最常用算法。分支定界法是一种搜索与迭代的方法,选择不同的分支变量和子问题进行分支。
2.1.1 分枝定界法的求解过程
- 1. 先求出相应松弛问题的最优解。
- 2. 若松弛问题无可行解,则整数线性规划问题无可行解。
- 3. 若求得的松弛问题最优解符合整数要求,则是整数线性规划问题的最优解。若不满足整数条件,则任选一个不满足整数条件的变量
x0i 来构造新的约束,分别添加到松弛问题中形成两个子问题: -
xi≤[x0i] 和xi≥[x0i]+1 - 依次在缩小的可行域中求解新构造的线性规划的最优解,并重复上述过程,直到子问题无解或有整数最优解(被查清)。
Q:为什么在步骤3中不满足整数条件时要添加上述两个约束条件?
A:因为变量
x0i 是一个不满足整数条件的变量,它注定无法构成整数规划的最优解,因此我们要向变量x0i 的两边去寻找合适的整数最优解。注意:构造新的约束条件是分别到整数规划问题对应的松弛问题中,独立构成两个不同的子问题再求解。
详情参考:分枝定界法
2.1.2 案例
分枝定界法总体上有点像二叉树,能看懂下面的案例基本就能理解分枝定界法。
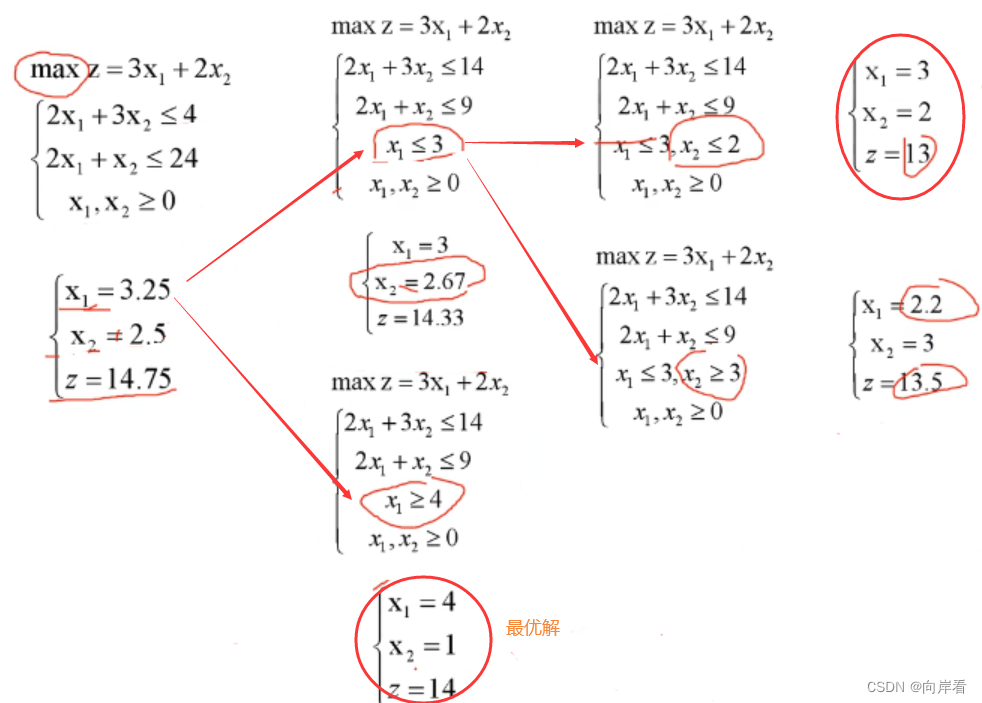
2.1.3 代码实现
数学模型如下:
1. 先创建intprog.m文件:
- function [x,fval,status] = intprog(f,A,B,I,Aeq,Beq,lb,ub,e)
- %整数规划求解函数 intprog()
- % 其中 f为目标函数向量
- % A和B为不等式约束 Aeq与Beq为等式约束
- % I为整数约束
- % lb与ub分别为变量下界与上界
- % x为最优解,fval为最优值
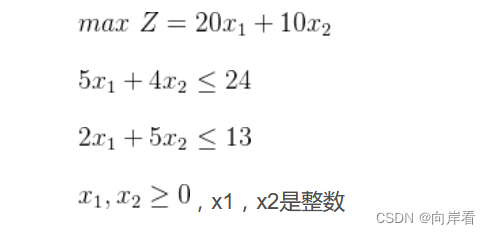
- %例子:
- % maximize 20 x1 + 10 x2
- % S.T.
- % 5 x1 + 4 x2 <=24
- % 2 x1 + 5 x2 <=13
- % x1, x2 >=0
- % x1, x2是整数
- % f=[-20, -10];
- % A=[ 5 4; 2 5];
- % B=[24; 13];
- % lb=[0 0];
- % ub=[inf inf];
- % I=[1,2];
- % e=0.000001;
- % [x v s]= IP(f,A,B,I,[],[],lb,ub,,e)
- % x = 4 1 v = -90.0000 s = 1
-
- % 控制输入参数
- if nargin < 9, e = 0.00001;
- if nargin < 8, ub = [];
- if nargin < 7, lb = [];
- if nargin < 6, Beq = [];
- if nargin < 5, Aeq = [];
- if nargin < 4, I = [1:length(f)];
- end, end, end, end, end, end
-
- %求解整数规划对应的线性规划,判断是否有解
- options = optimset('display','off'); %不需要每次优化结果都输出
- [x0,fval0,exitflag] = linprog(f,A,B,Aeq,Beq,lb,ub,options); %决策向量,最优解,是否有解
- if exitflag < 0
- disp('没有合适整数解');
- x = x0;
- fval = fval0;
- status = exitflag;
- return;
- else
- %采用分支定界法求解
- bound = inf;
- [x,fval,status] = branchbound(f,A,B,I,x0,fval0,bound,Aeq,Beq,lb,ub,e);
- end

2. 再创建branchbound.m文件
- function [newx,newfval,status,newbound] = branchbound(f,A,B,I,x,fval,bound,Aeq,Beq,lb,ub,e)
-
- % 分支定界法求解整数规划
- % f,A,B,Aeq,Beq,lb,ub与线性规划相同
- % I为整数限制变量的向量
- % x为初始解,fval为初始值
-
- options = optimset('display','off');
- [x0,fval0,status0]=linprog(f,A,B,Aeq,Beq,lb,ub,options);
-
- %递归中的最终退出条件
- %无解或者解比现有上界大则返回原解
- if status0 <= 0 || fval0 >= bound
- newx = x;
- newfval = fval;
- newbound = bound;
- status = status0;
- return;
- end
-
- %是否为整数解,如果是整数解则返回
- intindex = find(abs(x0(I) - round(x0(I))) > e);
- if isempty(intindex) %判断是否为空值
- newx(I) = round(x0(I));
- newfval = fval0;
- newbound = fval0;
- status = 1;
- return;
- end
-
- %当有非整可行解时,则进行分支求解
- %此时必定会有整数解或空解
- %找到第一个不满足整数要求的变量
- n = I(intindex(1));
- addA = zeros(1,length(f));
- addA(n) = 1;
- %构造第一个分支 x<=floor(x(n))
- A = [A;addA];
- B = [B,floor(x(n))];%向下取整
- [x1,fval1,status1,bound1] = branchbound(f,A,B,I,x0,fval0,bound,Aeq,Beq,lb,ub,e);
- A(end,:) = [];
- B(:,end) = [];
- %解得第一个分支,若为更优解则替换,若不是则保持原状
-
- status = status1;
- if status1 > 0 && bound1 < bound
- newx = x1;
- newfval = fval1;
- bound = fval1;
- newbound = bound1;
- else
- newx = x0;
- newfval = fval0;
- newbound = bound;
- end
-
- %构造第二分支
- A = [A;-addA];
- B = [B,-ceil(x(n))];%向上取整
- [x2,fval2,status2,bound2] = branchbound(f,A,B,I,x0,fval0,bound,Aeq,Beq,lb,ub,e);
- A(end,:) = [];
- B(:,end) = [];
-
- %解得第二分支,并与第一分支做比较,如果更优则替换
- if status2 > 0 && bound2 < bound
- status = status2;
- newx = x2;
- newfval = fval2;
- newbound = bound2;
- end
3. 测试
- function[x. fval.stetus] = intprog(f,A,B,I,Aeq,Beq,lb,ub,e)
- f = [-20, -10]
- A = [5,4;2,5]
- B = [24,13]
- lb = [0,0]
-
- [x, fval, status] = intprog(f, A, B, [1,2],[],[],lb)
2.2 割平面法
2.2.1 割平面法的基本思想
- 1. 如果松弛问题(
P0 )无解,则(P )无解; - 2. 如果(
P0 )的最优解为整数向量,则也是(P )的最优解; - 3. 如果(
P0 )的解含有非整数分量,则对(P0 )增加割平面条件:即对(P0 )增加一个线性约束,将(P0 )的可行区域割掉一块,使得非整数解恰好在割掉的一块中,但又没有割掉原问题(P )的可行解,得到问题(P1 ),重复上述的过程。
2.2.2 割平面法的基本步骤
注:这里的第二、三步是推理过程,简略来看,只需要看第一步、第二步中1和第四步即可。
第一步:求解整数规划对应松弛问题是否有整数最优解。若有整数最优解,则它也是整数规划的最优解,否则,转到第二步。
第二步:1. 引入松弛变量转化为等式约束:
![]()
其中,
2. 然后,将松弛变量的系数分别划分为整数部分和小数部分,如下:
![]()
其中,
同样,将求和结果划分为整数部分和小数部分,如下:
![]()
其中,
第三步:将划分后的
![]()
我们将所有的整数部分放入公式左侧,所有的小数部分放入公式右侧:
![]()
因为![]()
这样就对决策变量进行了一次割平面(增加约束条件)。
第四步:将约束条件
2.2.3 案例和代码实现
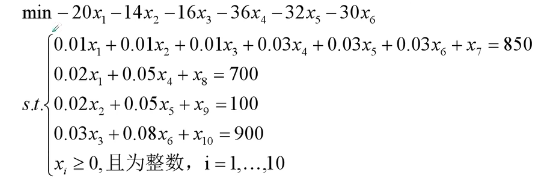
已知AM工厂是一个拥有四个车间的玩具生产厂商,该厂商今年新设计出A、B、C、D、E、F六种玩具模型,根据以前的生产情况及市场调查预测,得知生产每单位产品所需的工时、每个车间在一季度的工时上限以及产品的预测价格,如下表所示。问:每种设计产品在这个季度各应生产多少,才能使AM工厂这个季度的生产总值达到最大?
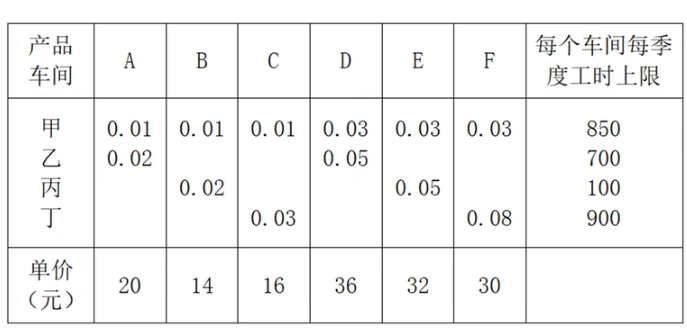
1. 建立模型
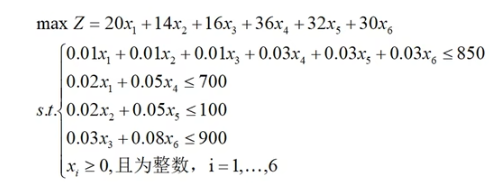
其中,x1,x2,x3,x4,x5,x6是A、B、C、D、E、F六种玩具模型的生产数量。注意,是车间之间是合作生产,而不是独立生产。
2. 引入松弛变量转化为等式约束
3. 代码实现
DividePlane.m
- function [intx,intf] = DividePlane(A,c,b,baseVector)
- %功能:用割平面法求解整数规划
- %调用格式:[intx,intf]=DividePlane(A,c,b,baseVector)
- %其中, A:约束矩阵;
- % c:目标函数系数向量;
- % b:约束右端向量;
- % baseVector:初始基向量;
- % intx:目标函数取最值时的自变量值;
- % intf:目标函数的最值;
- sz = size(A);
- nVia = sz(2);%获取有多少决策变量
- n = sz(1);%获取有多少约束条件
- xx = 1:nVia;
-
- if length(baseVector) ~= n
- disp('基变量的个数要与约束矩阵的行数相等!');
- mx = NaN;
- mf = NaN;
- return;
- end
-
- M = 0;
- sigma = -[transpose(c) zeros(1,(nVia-length(c)))];
- xb = b;
-
- %首先用单纯形法求出最优解
- while 1
- [maxs,ind] = max(sigma);
- %--------------------用单纯形法求最优解--------------------------------------
- if maxs <= 0 %当检验数均小于0时,求得最优解。
- vr = find(c~=0 ,1,'last');
- for l=1:vr
- ele = find(baseVector == l,1);
- if(isempty(ele))
- mx(l) = 0;
- else
- mx(l)=xb(ele);
- end
- end
- if max(abs(round(mx) - mx))<1.0e-7 %判断最优解是否为整数解,如果是整数解。
- intx = mx;
- intf = mx*c;
- return;
- else %如果最优解不是整数解时,构建切割方程
- sz = size(A);
- sr = sz(1);
- sc = sz(2);
- [max_x, index_x] = max(abs(round(mx) - mx));
- [isB, num] = find(index_x == baseVector);
- fi = xb(num) - floor(xb(num));
- for i=1:(index_x-1)
- Atmp(1,i) = A(num,i) - floor(A(num,i));
- end
- for i=(index_x+1):sc
- Atmp(1,i) = A(num,i) - floor(A(num,i));
- end
-
- Atmp(1,index_x) = 0; %构建对偶单纯形法的初始表格
- A = [A zeros(sr,1);-Atmp(1,:) 1];
- xb = [xb;-fi];
- baseVector = [baseVector sc+1];
- sigma = [sigma 0];
-
- %-------------------对偶单纯形法的迭代过程----------------------
- while 1
- %----------------------------------------------------------
- if xb >= 0 %判断如果右端向量均大于0,求得最优解
- if max(abs(round(xb) - xb))<1.0e-7 %如果用对偶单纯形法求得了整数解,则返回最优整数解
- vr = find(c~=0 ,1,'last');
- for l=1:vr
- ele = find(baseVector == l,1);
- if(isempty(ele))
- mx_1(l) = 0;
- else
- mx_1(l)=xb(ele);
- end
- end
- intx = mx_1;
- intf = mx_1*c;
- return;
- else %如果对偶单纯形法求得的最优解不是整数解,继续添加切割方程
- sz = size(A);
- sr = sz(1);
- sc = sz(2);
- [max_x, index_x] = max(abs(round(mx_1) - mx_1));
- [isB, num] = find(index_x == baseVector);
- fi = xb(num) - floor(xb(num));
- for i=1:(index_x-1)
- Atmp(1,i) = A(num,i) - floor(A(num,i));
- end
- for i=(index_x+1):sc
- Atmp(1,i) = A(num,i) - floor(A(num,i));
- end
- Atmp(1,index_x) = 0; %下一次对偶单纯形迭代的初始表格
- A = [A zeros(sr,1);-Atmp(1,:) 1];
- xb = [xb;-fi];
- baseVector = [baseVector sc+1];
- sigma = [sigma 0];
- continue;
- end
- else %如果右端向量不全大于0,则进行对偶单纯形法的换基变量过程
- minb_1 = inf;
- chagB_1 = inf;
- sA = size(A);
- [br,idb] = min(xb);
- for j=1:sA(2)
- if A(idb,j)<0
- bm = sigma(j)/A(idb,j);
- if bm<minb_1
- minb_1 = bm;
- chagB_1 = j;
- end
- end
- end
- sigma = sigma -A(idb,:)*minb_1;
- xb(idb) = xb(idb)/A(idb,chagB_1);
- A(idb,:) = A(idb,:)/A(idb,chagB_1);
- for i =1:sA(1)
- if i ~= idb
- xb(i) = xb(i)-A(i,chagB_1)*xb(idb);
- A(i,:) = A(i,:) - A(i,chagB_1)*A(idb,:);
- end
- end
- baseVector(idb) = chagB_1;
- end
- %------------------------------------------------------------
- end
- %--------------------对偶单纯形法的迭代过程---------------------
- end
- else %如果检验数有不小于0的,则进行单纯形算法的迭代过程
- minb = inf;
- chagB = inf;
- for j=1:n
- if A(j,ind)>0
- bz = xb(j)/A(j,ind);
- if bz<minb
- minb = bz;
- chagB = j;
- end
- end
- end
- sigma = sigma -A(chagB,:)*maxs/A(chagB,ind);
- xb(chagB) = xb(chagB)/A(chagB,ind);
- A(chagB,:) = A(chagB,:)/A(chagB,ind);
- for i =1:n
- if i ~= chagB
- xb(i) = xb(i)-A(i,ind)*xb(chagB);
- A(i,:) = A(i,:) - A(i,ind)*A(chagB,:);
- end
- end
- baseVector(chagB) = ind;
- end
- M = M + 1;
- if (M == 1000000)
- disp('找不到最优解!');
- mx = NaN;
- minf = NaN;
- return;
- end
- end
test.m
- c = [-20 ; -14 ; -16 ; -36 ; -32 ; -30]; % 目标函数系数向量
- A = [0.01 0.01 0.01 0.03 0.03 0.03 1 0 0 0;
- 0.02 0 0 0.05 0 0 0 1 0 0;
- 0 0.02 0 0 0.05 0 0 0 1 0;
- 0 0 0.03 0 0 0.08 0 0 0 1]; % 加上松弛变量后约束条件的系数矩阵
- b = [850; 700; 100; 900;]; % 约束右端向量
- [intx , intf] = DividePlane(A,c,b,[7 8 9 10]); % 初始基向量的下标 7 8 9 10
-
- intx
- intf = -intf % 取反求最大


