
- 1ESP32 使用micropython I2C 连接mpu6050 显示温度_mpu6050温度测量
- 2Xilinx DDR3 MIG IP核--汇总导航
- 3程序员都应该了解的7款AI 工具_程序员ai工具
- 4命名实体识别(NER – Named-entity recognition) 总结
- 5Xilinx 7系列FPGA架构之时钟资源(一)_xilinx fpga资源介绍
- 6CentOS 7 二进制方式安装minio单节点 —— 筑梦之路
- 7项目经理需要具备四种基本素质及八大管理技能_你认为项目经理应该具备哪些基本素质
- 8Git常用命令和QA(网摘)
- 9Python 凯撒密码_凯撒密码python
- 10简单编程:完成猜数字游戏 ,用户输入数字,判断该数字是大于,小于,还是等于随机生成的数字,等于的时候退出程序。_用户输入一个数据,判断输入数据是否是8,如果输入的数据等于8,输出"猜对了,你是我心里的蛔虫吗?""
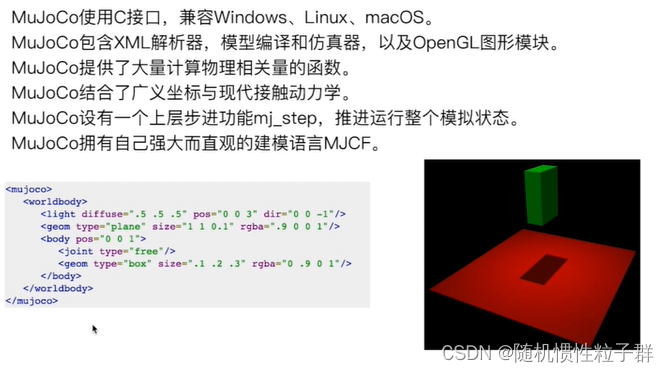
强化学习:MuJoCo机器人强化学习仿真入门(1)_使用mujoco进行强化学习
赞
踩


声明:我们跳过mujoco环境的搭建,搭建环境不难,可自行百度
下面开始进入正题(需要有一定的python基础与xml基础):

下面进入到建立机器人模型的部分:
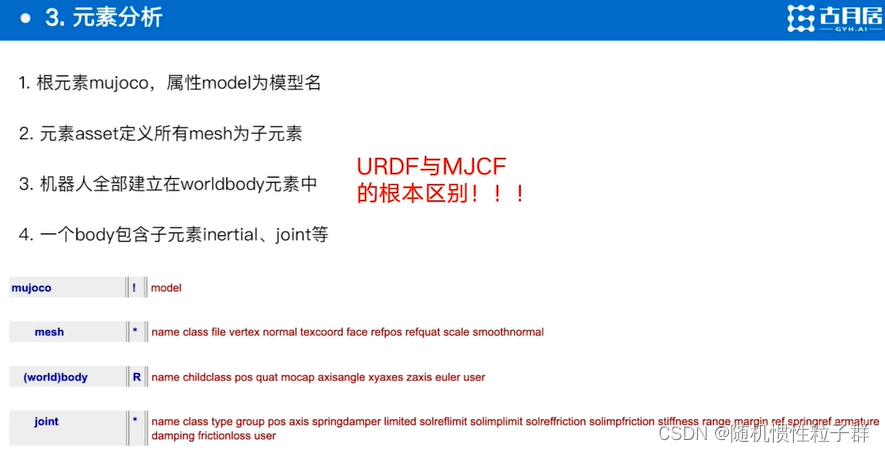
需要先介绍URDF模型文件和导出MJCF格式





介绍完毕,下面开始进行mujoco仿真:
首先将这4个文件复制到.mujoco/mujoco210/bin文件夹中:
接着讲ur5的模型stl文件放置在.mujoco/mujoco210文件夹中:
进入bin文件夹中开启一个终端输入:
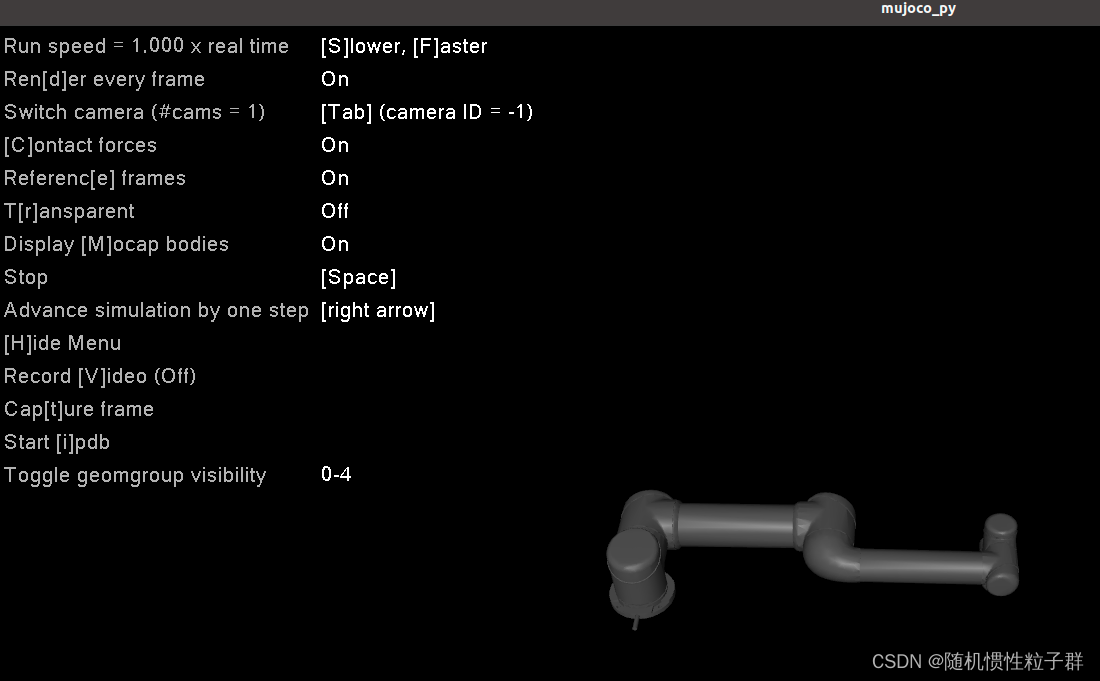
./simulate ur5.xml

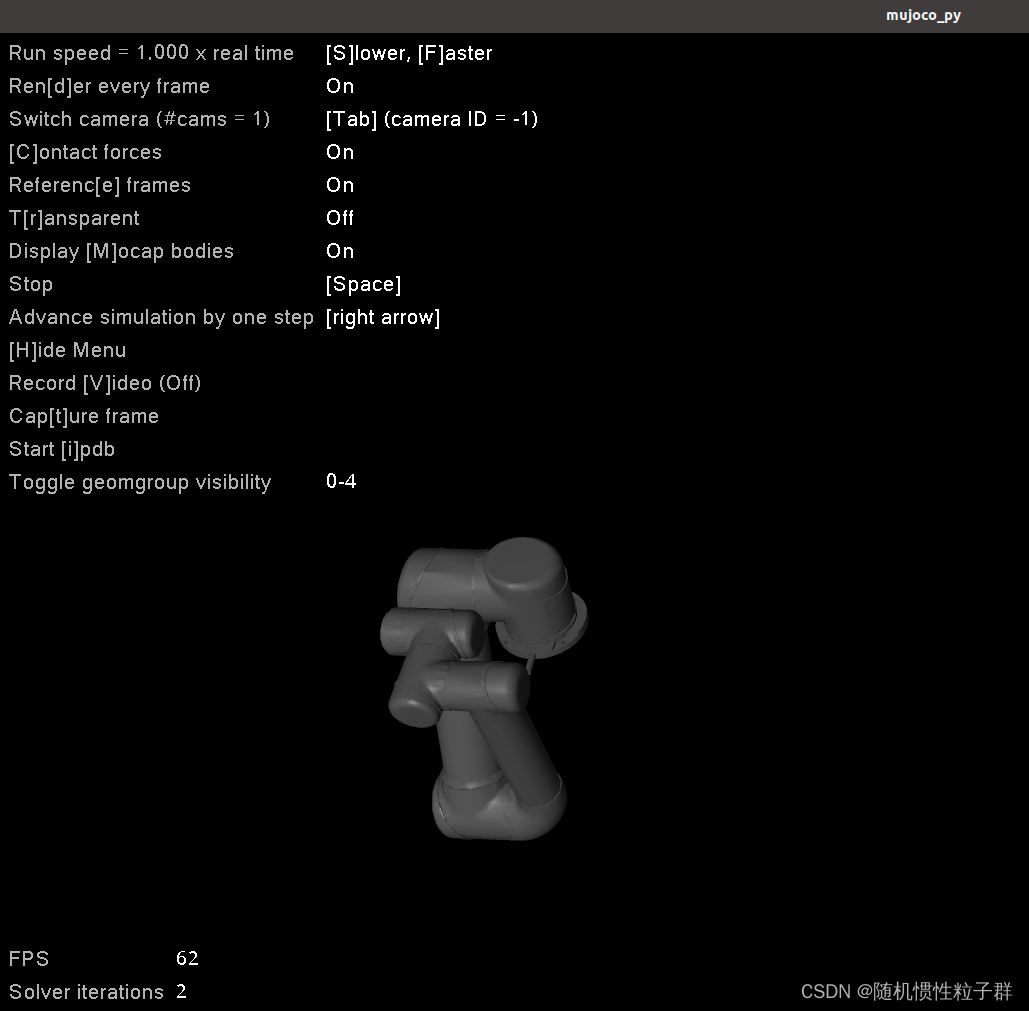
出现机械臂的模型可视化,下面讨论该如何进行控制:
开始介绍控制器接口:

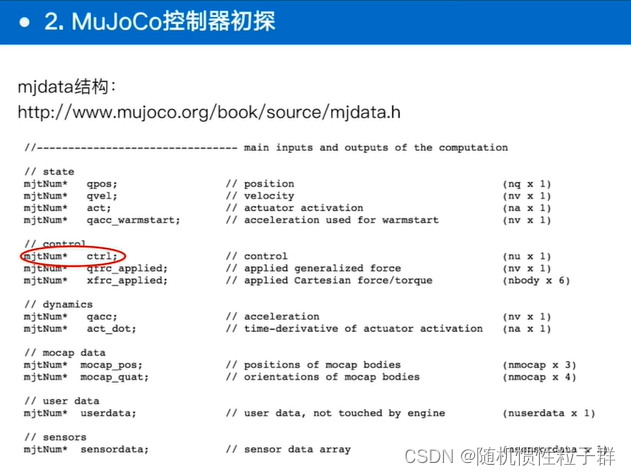

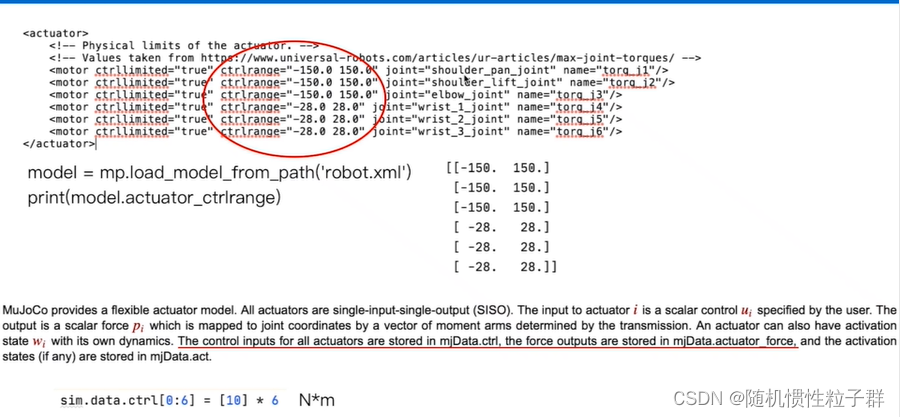

下面利用mujoco.py接口导入模型,并尝试施加控制器输入:

在运行main.py文件时,出现了一个报错,下面解决这个问题:
检查您的系统是否安装了OpenGL库,例如 libgl1-mesa-glx 和 libgl1-mesa-dri(对于linux的系统)。
-
打开终端: 在您的 Linux 系统上打开一个终端窗口。
-
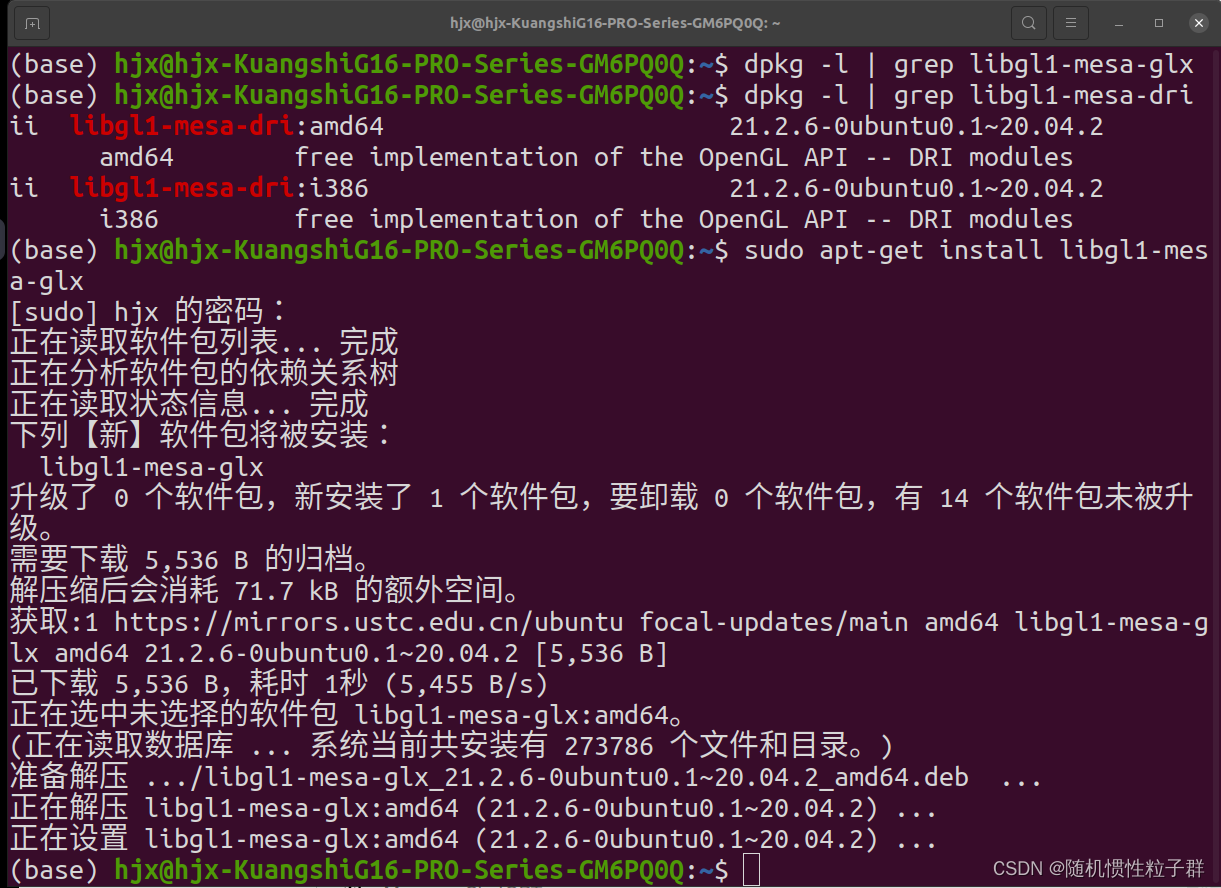
检查
libgl1-mesa-glx库: 使用以下命令来检查libgl1-mesa-glx库是否已安装:
dpkg -l | grep libgl1-mesa-glx
如果这个库已安装,您将看到列表中的条目和版本信息。如果没有列出,则表示这个库尚未安装。
- 检查
libgl1-mesa-dri库: 使用以下命令来检查libgl1-mesa-dri库是否已安装:
dpkg -l | grep libgl1-mesa-dri
同样,如果已安装,您将在列表中看到相关信息。
如果您发现这些库未安装,您可以使用以下命令来安装它们:
sudo apt-get update
sudo apt-get install libgl1-mesa-glx libgl1-mesa-dri
pycharm的运行结果:
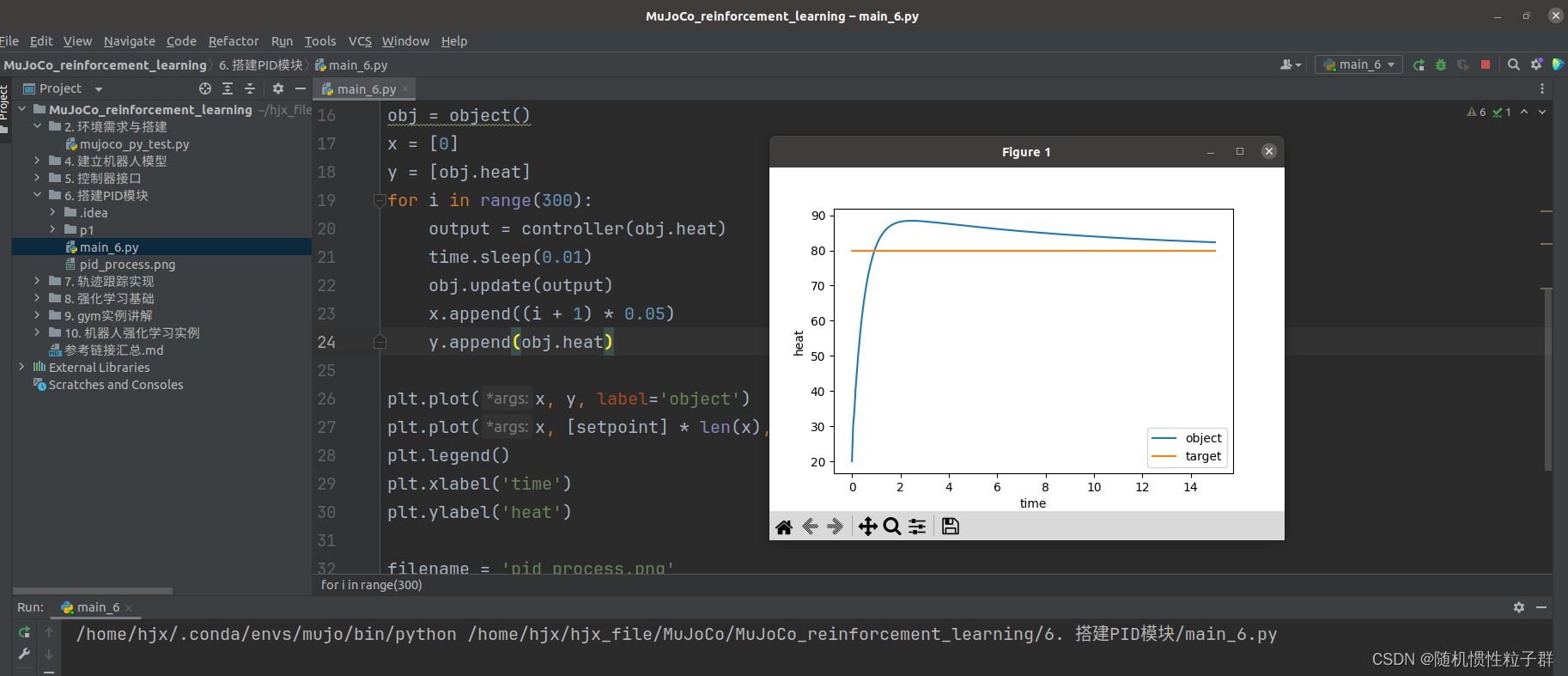
继续下一个环节,搭建PID模块:
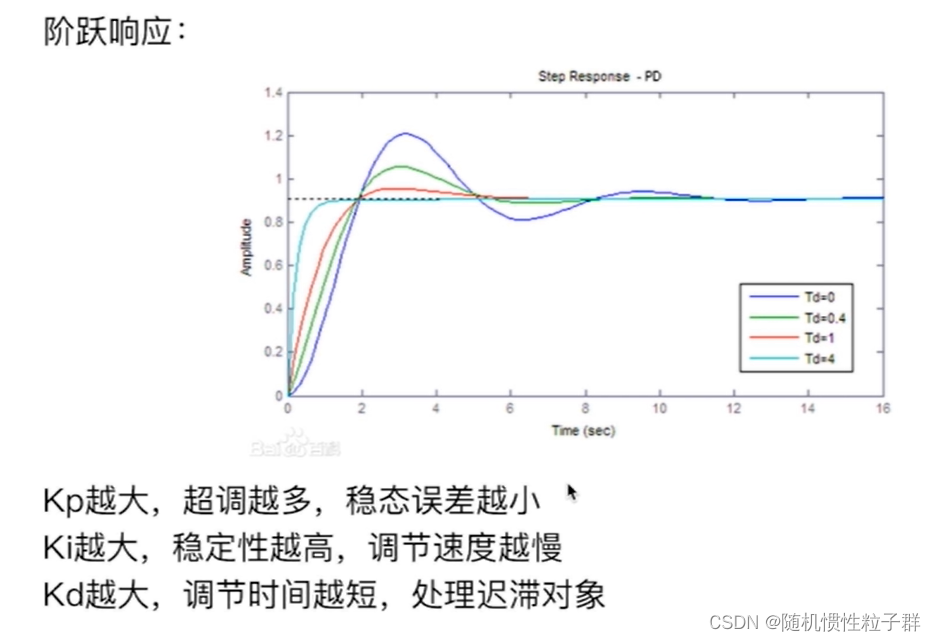
下面以一个简单的示例来展示:
接下来进行轨迹跟踪的实现:
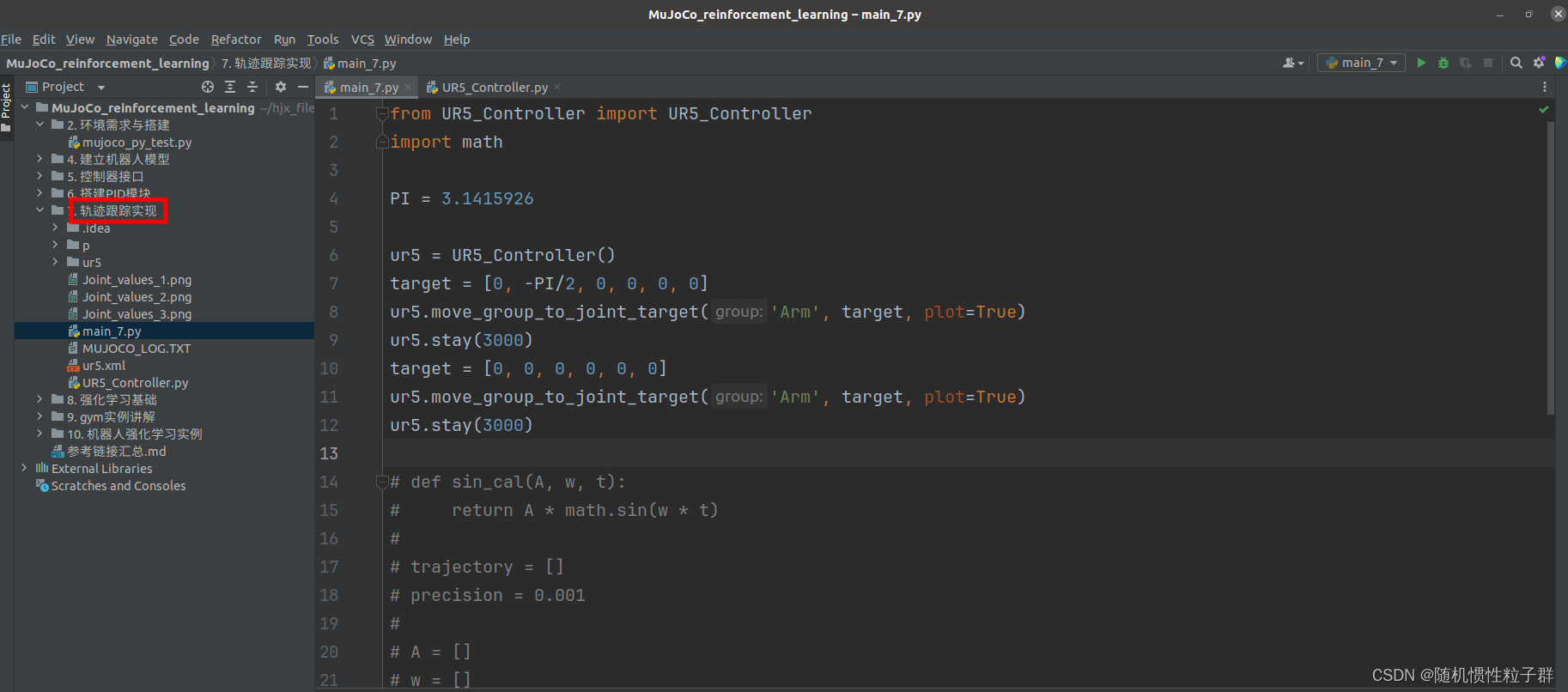
注释上图中的代码直至最后,开始运行(期间机械臂会动态运行),输出:
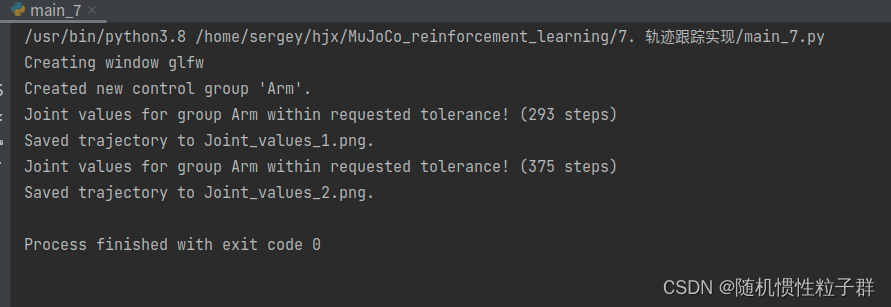
输出了2个图片:
Figure1:

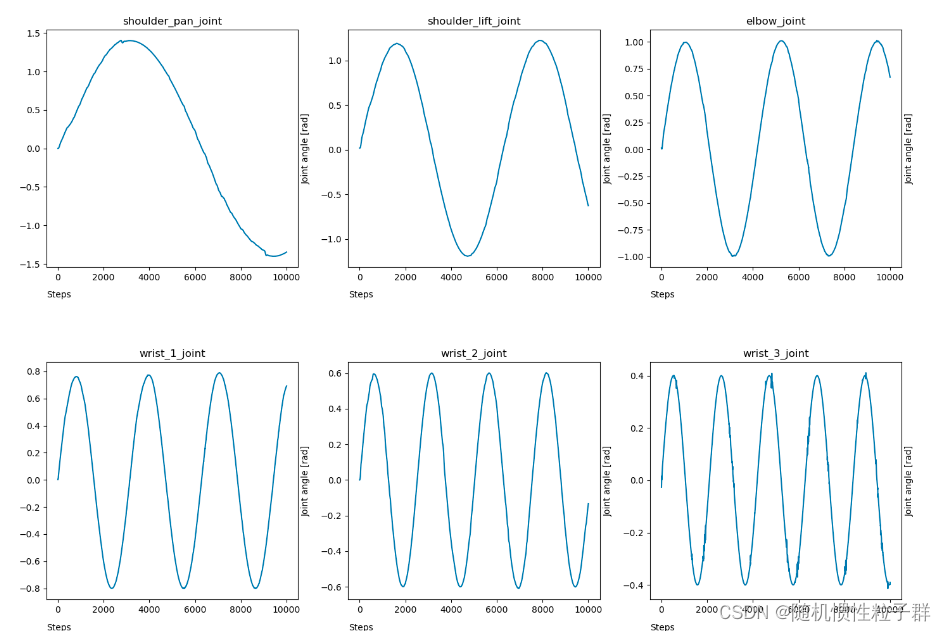
Figure2:

取消代码中的注释,继续运行(期间机械臂会动态运行):
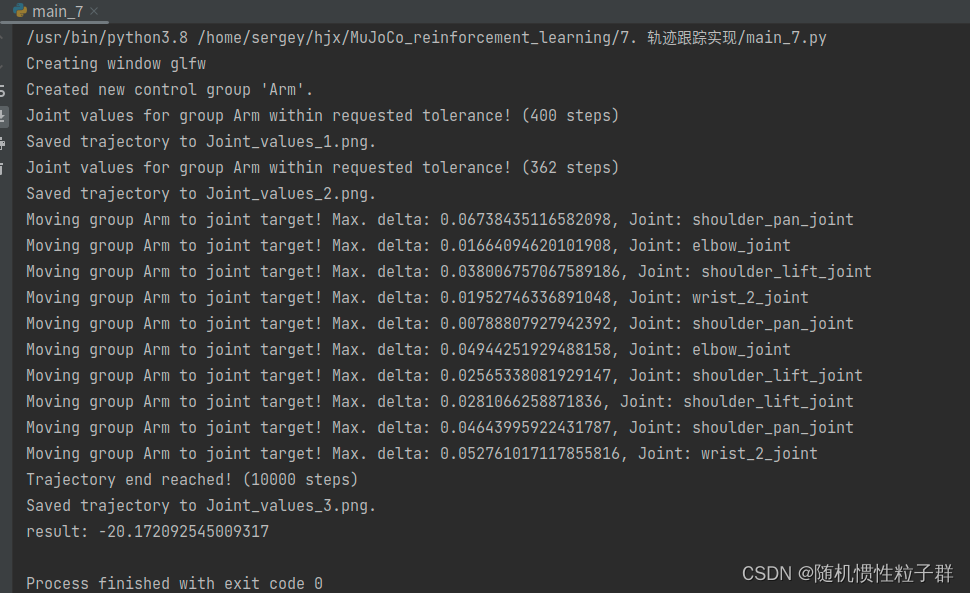
输出了3个图片:
Figure1:
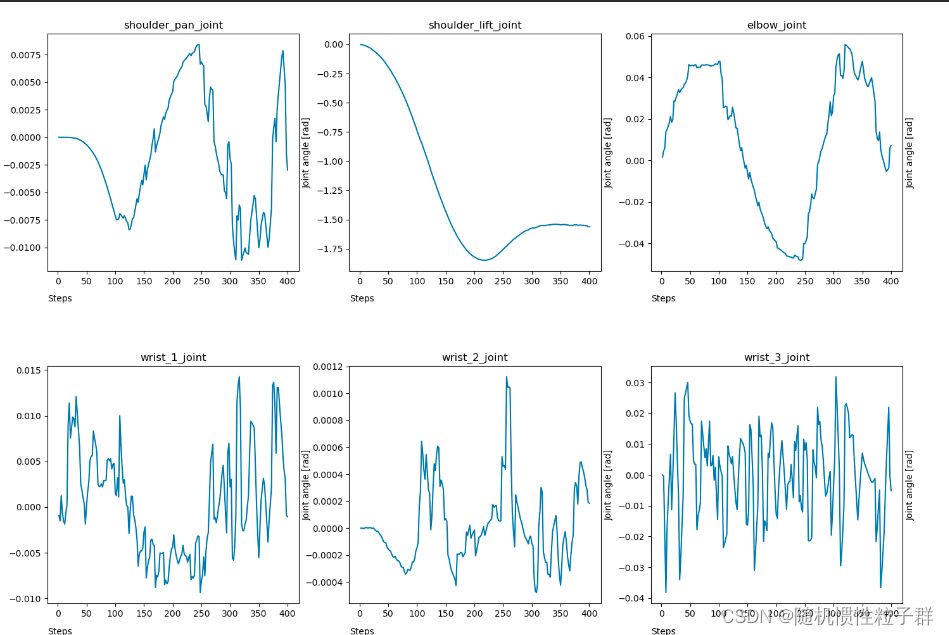
Figure2:

Figure3:
到此结束

