
- 1python 分词工具训练_中文分词入门和分词工具汇总攻略
- 2基于JavaSpringmvc+myabtis+html的鲜花商城系统设计和实现_.net mvc 鲜花网站免费
- 32024网络安全(黑客)如何学习
- 4如何修复 SQL Server 数据库中的恢复挂起状态?_sqlserver 恢复挂起
- 5c语言简单算法——分发糖果_分糖果c语言
- 6AI助手:打造引人入胜的文章标题
- 7Pycharm配置Git以及GitLab实现代码管理(全网最详细)_pycharm git gitlab
- 8分布式监控系统Zabbix--完整安装记录-批量添加主机和自动发现端口
- 9linux新建一个用户_linux组态软件-跨平台组态,linux组态演示
- 10Java 岗位 【数据库】 面试题及答案详解_java面试常见数据库问题及回答技巧
自动驾驶控制算法---运动学方程_frenet坐标系的y坐标是哪一根轴
赞
踩
之前跟着 b战老王 老师学习了自动驾驶相关课程,现在回顾一下自动驾驶的相关知识,并且写下相应的心得体会。
控制模块是自动驾驶中控制车辆行驶的重要模块。
控制分为横向控制和纵向控制。 横向控制就是通过控制方向盘进而控制前轮转角待得到横向位移;纵向控制就是通过控制油门和刹车控制力的变化(加速度),进而控制速度得到纵向位移。横向控制用MPC或LQR,纵向控制用PID。还有其他控制算法,如Stanley算法等。
1、三个坐标系
先讲一下控制算法的坐标系。
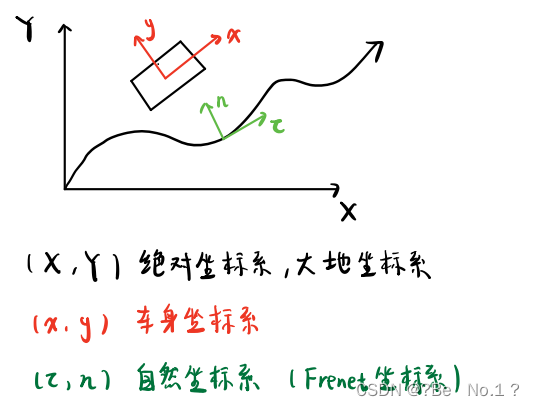
绝对坐标系:也称为大地坐标系或世界坐标系,是整个地图的坐标信息。
车身坐标系:是以自车为原点建立的坐标系,以纵向(车头)为x轴,横向为y轴。
自然坐标系:也称为Frenet坐标系。Frenet坐标系可以将控制模块的纵向控制和横向控制解耦,这样可以分别控制方向盘与油门进而分别控制横向位移和纵向位移。在规划模块上也是在Frenet坐标系进行信息的处理再转化为其他坐标系交给控制。
左手系:左手拇指指向x轴,食指指向y轴,中指指向z轴。一般计算机图形/视觉采用左手系。
右手系:右手拇指指向x轴,食指指向y轴,中指指向z轴。一般数学、物理学采用右手系。
2、构建模型

自行车模型:对车进行力学分析时,将车简化为自行车模型。不考虑轮胎变形的自行车模型,因为低速下轮胎变形很小,近似为钢铁的轮子,即车的轮子是刚劲的轮子,有无穷的刚度。车完全左右完全对称,左轮和右轮之间的距离相比运动轨迹来说可以忽略不计,所以将车压成一条线。
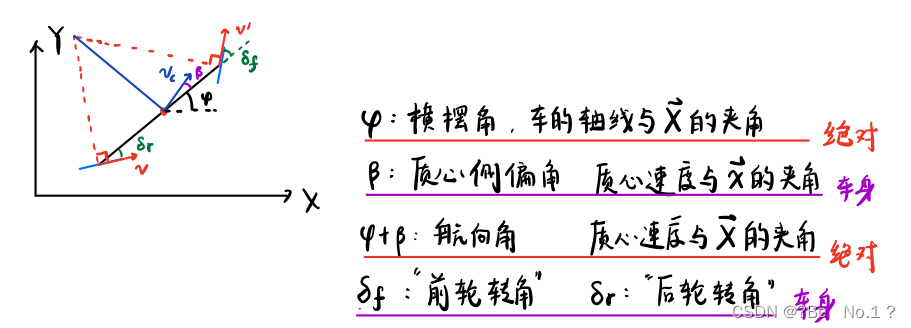
上图为自行车模型的车辆在世界坐标系下的坐标信息,以及车辆自身坐标系下的信息。
V是后轮速度,V‘是前轮速度,利用理论力学的瞬心法可以求出质心的速度Vc。
前轮转角和方向盘转角是一一对应的,有传动比作为比例。
3、运动学模型
建立几何关系得到车辆的运动学模型。运动学模型的假设比较多,假设轮胎是刚度的轮胎,即不会变形,因此运用场景受限,适用于速度低、转弯的半径比较大、规划的轨迹比较平缓等场景。
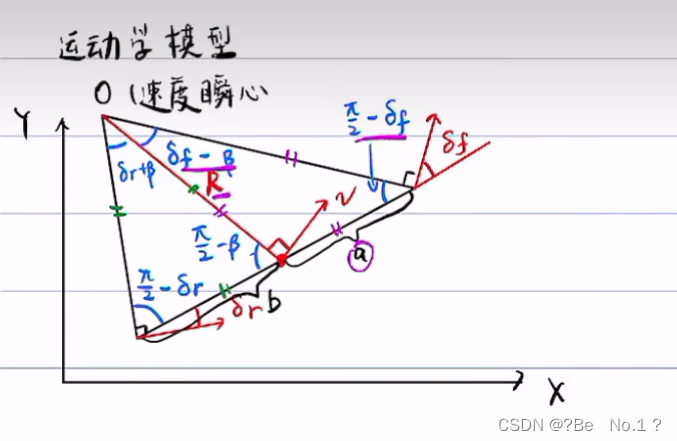
上图是对车辆的建模图,根据模型得到以下的方程:
利用正弦定理得到L(车的前轮和后轮之间的轴距)和R(转弯半径或曲率半径也是线速度(质心)到瞬心的距离 )的关系,如下:
L = a+b 为车的轴距
代入上面的方程得出运动学方程:
因为运动学模型假设了速度低,所以认为不会发生侧滑,则vy = 0,那么质心侧偏角β ≈ 0,此时横摆角 ≈ 航向角。
而且低速下,后轮转角 ≈ 0,则最终的运动学方程为:
主要讲述了三个坐标系是什么,在坐标系下构建自行车模型,然后得出车辆的运动学模型。


