
热门标签
热门文章
- 1【全解析 | PTA】浙大版《Python 程序设计》题目集-第三章_len('3//11//2018'.split('/'))的结果是_____。
- 2全网最详细的Python自动化测试
- 3江科大 STM32 标准库_csdn江科大
- 4高通平台刷机方案适配-ROM定制开发入门到精通
- 5多团队协作开发的大型项目Git工作流设计分享_项目协作工作流
- 6【Android WebSocket】Android 端 WebSocket 基本用法 ( 添加依赖和权限 | 创建 WebSocketClient 客户端类 | 建立连接并发送消息 )_android websocketclient
- 7论文阅读<GDIP: Gated Differentiable Image Processing for Object-Detection in Adverse Conditions>_gdip: object detection
- 8如何创建 Spring Boot 项目_创建springboot项目
- 9Selenium——浏览器设置_download.prompt_for_download
- 10广度优先搜索(BFS)寻找迷宫两点之间最短路径的C语言实现_迷宫最短路径算法c语言
当前位置: article > 正文
超声波测距模块(HC-SR04)---外部中断+定时器计时_超声波模块外部中断
作者:小小林熬夜学编程 | 2024-04-24 12:28:20
赞
踩
超声波模块外部中断
超声波测距模块介绍
实物图

超声波传感器模块上面通常有两个超声波元器件,一个用于发射,一个用于接收。
引脚定义
电路板上有四个引脚:VCC、GND、Trig(控制端)、Echo(接收端)。
1.单片机在控制口发一个 10US 以上的高电平,
2.就可以在接收口等待传感器模块高电平输出.
3.一有输出单片机就可以开定时器计时,
4.当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,
方可算出距离.如此不断的周期测,就可以达到你移动测量的值了。
- 1
- 2
- 3
- 4
- 5
即
Trig(控制端):对应的GPIO引脚设置为输出模式
Echo(接收端):对应的GPIO引脚设置为输入模式
- 1
- 2
模块工作原理
(1)采用 IO 触发测距,给至少 10us 的高电平信号;
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 输出一高电平,高电平持续的时间就是此次测距的时间
(4)超声波从发射到返回的时间.测试距离=(高电平时间*声速(340M/S))/2;
- 1
- 2
- 3
- 4
超声波时序图
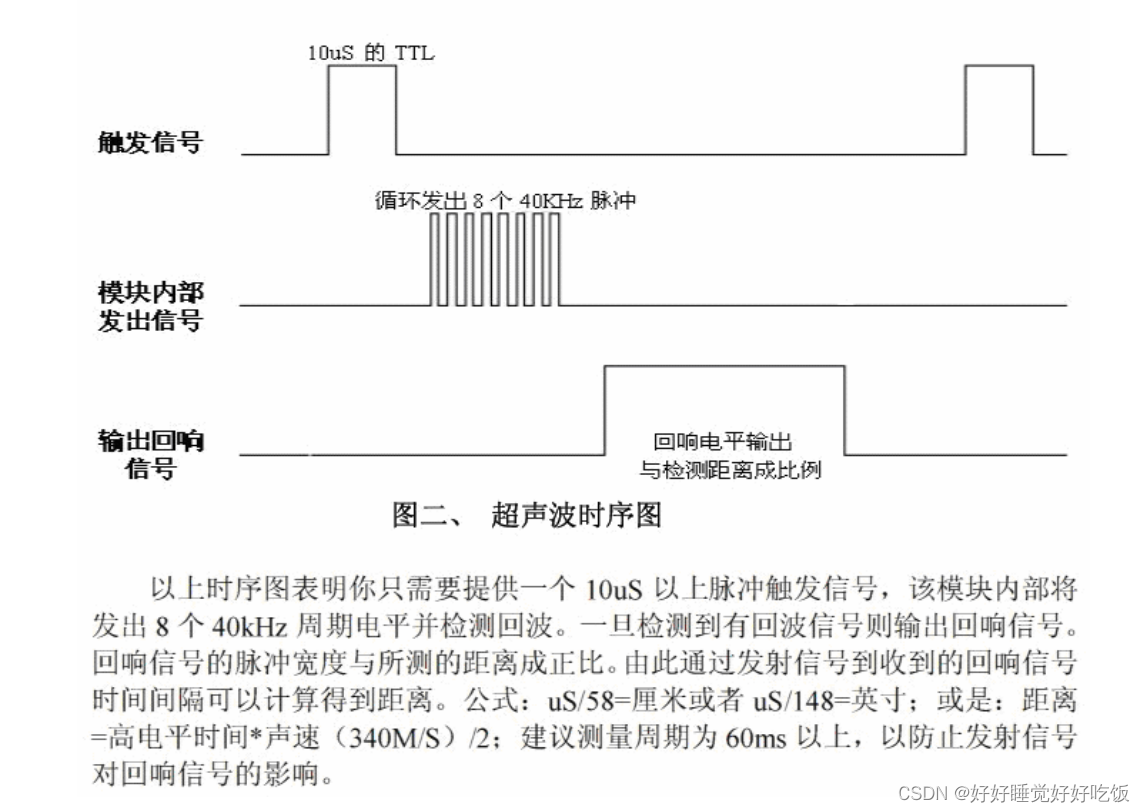
注意:手册介绍说建议测量周期为60ms以上。防止回响信号没有测量完,就再一次发送触发信号。
- 1
模块实现
思路
运用定时器计时 CNT*(CNT计数一次的时间)*速率=距离
运用功能
1.GPIO引脚输出高电平,置为1;
2.外部中断:在输入引脚收到高电平时,触发中断,开启定时器,计数器CNT置0;
3.定时器计时:
配置流程
1. 开启时钟(定时器、GPIO)
2. 配置GPIO引脚结构体(Trig,Echo):GPIO_Init();
3. 配置NVIC、和外部中断EXTI:NVIC_Init() / EXTI_Init()
4. 配置定时器结构体初始化:TIM_TimeBaseInit();
5. 配置定时器中断结构体(更新中断)NVIC_Init / TIM_ITConfig
6. 使能定时器:TIM_Cmd
7. 编写外部中断服务函数:打开定时器,计时器CNT清0
8. 编写定时器中断服务函数:清除中断
9. Trig引脚输出高电平(10us以上),然后关闭
10. 等待Echo引脚输出高电平开始(EXTI外部中断触发),定时器打开->开启计数器计数
11. 等待Echo引脚输出高电平结束(EXTI外部中断结束),定时器关闭->停止计数器计数
(注意在主函数配置NVIC分组):NVIC_PriorityGroupConfig();
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
代码示例
UltrasonicWave.c
#include "stm32f10x.h"
#include <stdio.h>
#include "delay.h"
#include "time.h"
#include "Bluetooth.h"
#include "string.h"
int count;
void UltrasonicWave_Init(void)
{
GPIO_InitTypeDef GPIOInitDef;
NVIC_InitTypeDef NVICInitDef;
EXTI_InitTypeDef EXTIInitDef;
//-----------------------------------------------------
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);
//-----------------------------------------------------
GPIOInitDef.GPIO_Pin=GPIO_Pin_0; //PB0
GPIOInitDef.GPIO_Mode=GPIO_Mode_Out_PP; //通用推挽
GPIOInitDef.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIOInitDef);
GPIOInitDef.GPIO_Pin=GPIO_Pin_1; //PB1
GPIOInitDef.GPIO_Mode=GPIO_Mode_IPD; //上拉输入,接收高电平
GPIOInitDef.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIOInitDef);
//-----------------------------------------------------
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);
NVICInitDef.NVIC_IRQChannel=EXTI1_IRQn; //设置中断线1
NVICInitDef.NVIC_IRQChannelCmd=ENABLE;
NVICInitDef.NVIC_IRQChannelPreemptionPriority=0;
NVICInitDef.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVICInitDef);
EXTIInitDef.EXTI_Line=EXTI_Line1; //设置外设中断源
EXTIInitDef.EXTI_LineCmd=ENABLE;
EXTIInitDef.EXTI_Mode=EXTI_Mode_Interrupt;
EXTIInitDef.EXTI_Trigger=EXTI_Trigger_Rising_Falling;//上升沿
EXTI_Init(&EXTIInitDef);
}
void EXTI1_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line1) != RESET)
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1))//up
{
TIM_SetCounter(TIM1,0);
TIM_Cmd(TIM1, ENABLE); //开启时钟 Tim1
}
else
{
TIM_Cmd(TIM1, DISABLE);
}
EXTI_ClearITPendingBit(EXTI_Line1); //清除EXTI1线路挂起位
}
}
void put_high(void) //输出10us以上的高电平
{
GPIO_SetBits(GPIOB,GPIO_Pin_0);
delay_us(12);
GPIO_ResetBits(GPIOB,GPIO_Pin_0);
// l=lcont*34/20.0;
// return l;
}
//**************************************************************************************************
float Distance;
char a[200];
void juli(void)
{
Distance=TIM_GetCounter(TIM1)*340/200.0;
delay_ms(1000);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
time.c
#include "stm32f10x.h"
#include <stdio.h>
void Time1_Init()
{
TIM_TimeBaseInitTypeDef TIMBaseInitDef;
NVIC_InitTypeDef NVICInitDef;
//-----------------------------------------------------开时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //PA8
//----------------------------------------------------- 配置定时器
TIMBaseInitDef.TIM_ClockDivision=TIM_CKD_DIV1;
TIMBaseInitDef.TIM_CounterMode=TIM_CounterMode_Up;//配置向上计数
TIMBaseInitDef.TIM_Period=1000-1; //每1ms一个周期,999个, 计数1000个为1ms
TIMBaseInitDef.TIM_Prescaler=7200-1;//10khz t=100us 0.1ms
TIM_TimeBaseInit(TIM1,&TIMBaseInitDef);
//----------------------------------------------------- 设置中断
NVICInitDef.NVIC_IRQChannel=TIM1_UP_IRQn; //设置更新中断
NVICInitDef.NVIC_IRQChannelCmd=ENABLE;
NVICInitDef.NVIC_IRQChannelPreemptionPriority=0;
NVICInitDef.NVIC_IRQChannelSubPriority=2;
NVIC_Init(&NVICInitDef);
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);//更新中断***
TIM_Cmd(TIM1,ENABLE); //使能定时器
}
void TIM1_UP_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1,TIM_IT_Update)==SET)
{
TIM_ClearITPendingBit(TIM1,TIM_IT_Update);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/479326
推荐阅读
相关标签

