
热门标签
热门文章
- 1element ui el-calendar日历组件使用总结_elementui日历组件
- 2Chrome安装VUE调试插件_谷歌浏览器vue插件
- 3MySQL数据库下载及安装教程(下载安装篇)_mysql数据库的下载安装
- 4基于乐吾乐meta2d从零实现可视化流程图编辑器(十二)_meta2d: true, pens: [
- 5python爬取网易云音乐热评_网易云热评爬取
- 6配置终端服务和远程桌面服务器身份验证和加密级别
- 7Mycat2 使用教程(二)分库分表、mysql分库分表_多库时如何设置mycat
- 8大话设计模式16----状态模式_c# 大话设计模式 状态模式
- 9Flutter Camera插件使用入门_dart 调用手机上的摄像头
- 10安全配置审计概念、应用场景、常用基线及扫描工具_基线检查工具
当前位置: article > 正文
fast-lio运行步骤(使用velodyne数据)_fastlio安装和启动
作者:小小林熬夜学编程 | 2024-04-24 21:08:54
赞
踩
fastlio安装和启动
一、新建工作空间,并clone源码
https://github.com/hku-mars/FAST_LIO.git编译大概率会报错,提示缺少livox_ros_driver
二、安装livox驱动
可以单独新建一个工作空间,在src文件夹中,分别下载以下两个源码文件
git clone https://github.com/Livox-SDK/Livox-SDK.gitgit clone https://github.com/Livox-SDK/livox_ros_driver.git(1)cd 到SDK文件夹,编译
- cd Livox-SDK
- cd build && cmake ..
- make
- sudo make install
(2)返回到工作空间下,使用catkin_make编译
三、配置fast-lio参数文件
使用fast-lio运行velodyne数据,需要使用到作者提供的mapping_velodyne.launch文件。
运行之前,需要根据实际情况,配置velodyne.yaml文件:
主要涉及lid_topic和imu_topic以及线束信息,可按照实际情况进行设置。
四、编译运行
配置完成后,再次编译fast-lio,此时即可顺利编译成功
运行:
roslaunch fast_lio mapping_velodyne.launch播包:
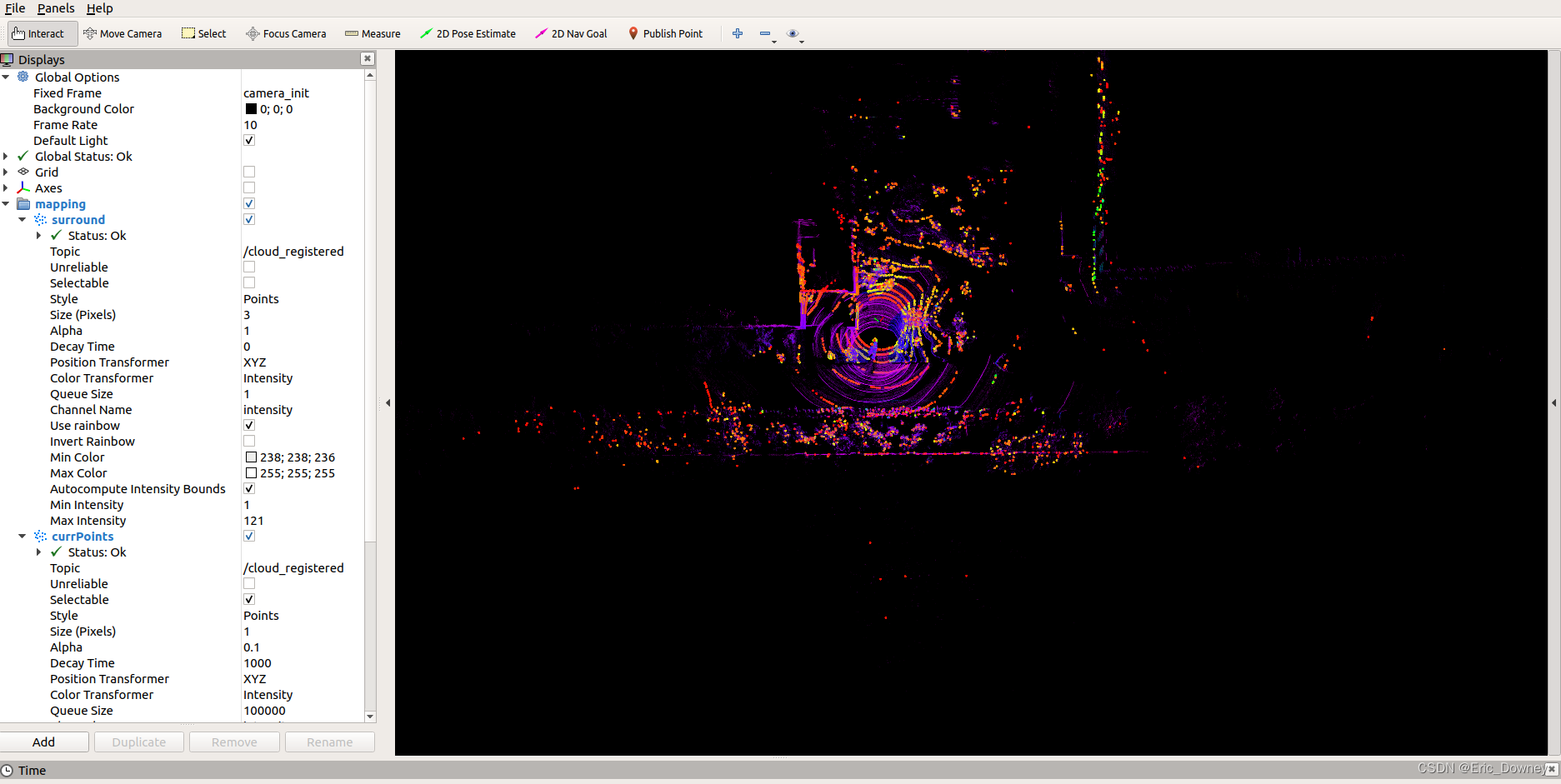
rosbag play yourbagname.bag效果:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/481553
推荐阅读
相关标签

