
热门标签
热门文章
- 1《2022-2023中国人工智能计算力发展评估报告》发布_人工智能行业应用渗透度
- 2解决方案: sqlserver 2008登陆时, 出现服务器主体 "xxxcom" 无法在当前安全上下文下访问数据库 "db_xxx_com"。_载入 sqlserver2008 主体失败
- 3web开发后端技能简历_通过这6门课程提高您的Web开发技能
- 4ubantu系统更换镜像源(出现E: 无法定位软件包 yum)_command 'yum' not found, did you mean:
- 5Ubuntu配置中文环境_ubuntu 如何设置中文环境
- 6微信公众号接入讯飞星火大模型_python sparkweb
- 7将图片合理分配到n个文件夹_照片文件夹合理明明
- 8JavaScript Class类详解_js class
- 9python3入门小题目_实现isprime()函数,参数为整数,如果整数是素数
- 102021计算机视觉-包揽所有前沿论文源码 -上半年_wacv 商汤
当前位置: article > 正文
python 图像处理 拉普拉斯算子的实现和改进-LoG和DoG算子_用python编程对拉普拉斯算子对图像进行空间滤波和增强
作者:小小林熬夜学编程 | 2024-02-08 15:38:10
赞
踩
用python编程对拉普拉斯算子对图像进行空间滤波和增强
拉普拉斯算子
拉普拉斯算子是最简单的各向同性微分算子,它具有旋转不变性。
我们经常把它作为边缘检测之一,也是工程数学中常用的一种积分变换,也可以用于图像增强、角点检测等等。
这里只给出它的代码,原理可参考其他博客及百科。
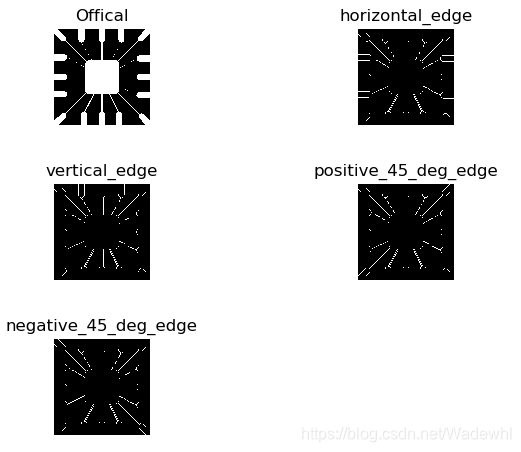
在图像处理中,拉普拉斯算子为离散的形式,其核心就是一个3✖3的卷积核。
# 图像增强算法 # 拉普拉斯算子,自编写实现,利用空域卷积运算实现滤波 # 具有图像增强效果,同时亦可用于边缘检测、角点检测 import cv2 import numpy as np import matplotlib.pyplot as plt if __name__ == '__main__': src = cv2.imread('enhance.jpg', 1) plt.subplot(3, 2, 1) plt.imshow(src) plt.axis('off') plt.title('Offical') kernel = np.array([[-1, -1, -1], [2, 2, 2], [-1, -1, -1]]) horizontal_edge = cv2.filter2D(src, cv2.CV_32F, kernel) horizontal_edge = cv2.convertScaleAbs(horizontal_edge) # _, horizontal_edge = cv2.threshold(horizontal_edge, horizontal_edge.max() * 0.8, 255, cv2.THRESH_BINARY) plt.subplot(3, 2, 2) plt.imshow(horizontal_edge) plt.axis('off') plt.title('horizontal_edge') kernel = np.array([[-1, 2, -1], [-1, 2, -1], [-1, 2, -1]]) vertical_edge = cv2.filter2D(src, ddepth=cv2.CV_32F, kernel=kernel) vertical_edge = cv2.convertScaleAbs(vertical_edge) # _, vertical_edge = cv2.threshold(vertical_edge, vertical_edge.max() * 0.8, 255, cv2.THRESH_BINARY) plt.subplot(3, 2, 3) plt.imshow(vertical_edge) plt.axis('off') plt.title('vertical_edge') kernel = np.array([[-1, -1, 2], [-1, 2, -1], [2, -1, -1]]) positive_45_deg_edge = cv2.filter2D(src, ddepth=cv2.CV_32F, kernel=kernel) positive_45_deg_edge = cv2.convertScaleAbs(positive_45_deg_edge) # positive_45_deg_edge = cv2.threshold(positive_45_deg_edge, positive_45_deg_edge.max() * 0.8, 255, cv2.THRESH_BINARY) plt.subplot(3, 2, 4) plt.imshow(positive_45_deg_edge) plt.axis('off') plt.title('positive_45_deg_edge') kernel = np.array([[2, -1, -1], [-1, 2, -1], [-1, -1, 2]]) negative_45_deg_edge = cv2.filter2D(src, ddepth=cv2.CV_32F, kernel=kernel) negative_45_deg_edge = cv2.convertScaleAbs(negative_45_deg_edge) # negative_45_deg_edge = cv2.threshold(negative_45_deg_edge, negative_45_deg_edge.max() * 0.8, 255, cv2.THRESH_BINARY) cv2.imshow('negative_45_deg_edge', negative_45_deg_edge) plt.subplot(3, 2, 5) plt.imshow(negative_45_deg_edge) plt.axis('off') plt.title('negative_45_deg_edge') plt.show()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
结果展示:
LoG和DoG算子
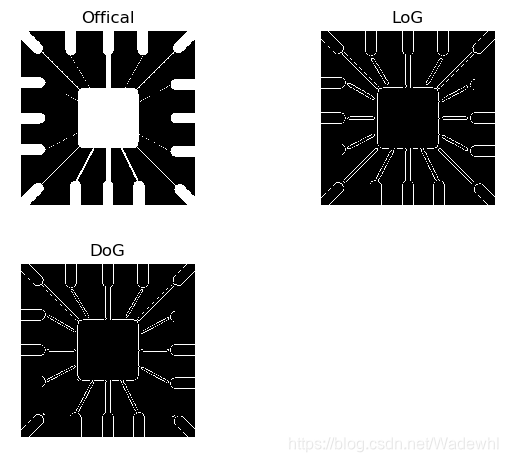
LoG和DoG算子是拉普拉斯算子的改进方法。
LoG:高斯拉普拉斯算子(LoG,Laplacian of Gaussian),首先对图像进行高斯暖卷积滤波进行降噪处理,再采用Laplace算子进行边缘检测。
DoG:高斯函数差分(DoG, Difference of Gaussian), 是可以通过将图像与高斯函数进行卷积得到一幅图像的低通滤波结果,即去噪过程,这里的Gaussian和高斯低通滤波器的高斯一样,是一个函数,即为正态分布函数。同时,它对高斯拉普拉斯LoG的近似.
# 图像增强算法 # LoG和DoG算子 # 均为基于拉普拉斯算子的改进 # 可用于边缘检测和角点检测 import cv2 import numpy as np import matplotlib.pyplot as plt def genGaussianKernel(ksize, sigma): half_ksize = ksize // 2 C = 2 * np.pi * sigma * sigma x = y = np.linspace(-half_ksize, half_ksize, ksize) x, y = np.meshgrid(x, y) kernel = np.exp(-(x ** 2 + y ** 2) / (2 * sigma ** 2)) / C return kernel def zerosCrossing(src, thresh): dsize = (src.shape[1], src.shape[0]) M = np.array([[1, 0, -1], [0, 1, 0]], dtype=np.float32) shift_left = cv2.warpAffine(src, M, dsize) M = np.array([[1, 0, 1], [0, 1, 0]], dtype=np.float32) shift_right = cv2.warpAffine(src, M, dsize) M = np.array([[1, 0, 0], [0, 1, -1]], dtype=np.float32) shift_up = cv2.warpAffine(src, M, dsize) M = np.array([[1, 0, 0], [0, 1, 1]], dtype=np.float32) shift_down = cv2.warpAffine(src, M, dsize) M = np.array([[1, 0, 1], [0, 1, 1]], dtype=np.float32) shift_right_down = cv2.warpAffine(src, M, dsize) M = np.array([[1, 0, -1], [0, 1, -1]], dtype=np.float32) shift_left_up = cv2.warpAffine(src, M, dsize) M = np.array([[1, 0, 1], [0, 1, -1]], dtype=np.float32) shift_right_up = cv2.warpAffine(src, M, dsize) M = np.array([[1, 0, -1], [0, 1, 1]], dtype=np.float32) shift_left_down = cv2.warpAffine(src, M, dsize) shift_left_right_sign = (shift_left * shift_right) shift_up_down_sign = (shift_up * shift_down) shift_rd_lu_sign = (shift_right_down * shift_left_up) shift_ru_ld_sign = (shift_right_up * shift_left_down) shift_left_right_norm = abs(shift_left - shift_right) shift_up_down_norm = abs(shift_up - shift_down) shift_rd_lu_norm = abs(shift_right_down - shift_left_up) shift_ru_ld_norm = abs(shift_right_up - shift_left_down) candidate_zero_crossing = \ ((shift_left_right_sign < 0) & (shift_left_right_norm > thresh)).astype('uint8') +\ ((shift_up_down_sign < 0) & (shift_up_down_norm > thresh)).astype('uint8') + \ ((shift_rd_lu_sign < 0) & (shift_rd_lu_norm > thresh)).astype('uint8') + \ ((shift_ru_ld_sign < 0) & (shift_ru_ld_norm > thresh)).astype('uint8') ResImg = np.zeros(shape=src.shape, dtype=np.uint8) ResImg[candidate_zero_crossing >= 2] = 255 return ResImg def LoG(src, ksize, sigma=0, thresh=None, alpha=0.01): blur_img = cv2.GaussianBlur(src.astype('float32'), (ksize, ksize), sigmaX=sigma) LoG_img = cv2.Laplacian(blur_img, cv2.CV_32F) if thresh is None: thresh = abs(LoG_img).max() * alpha edge_image = zerosCrossing(LoG_img, thresh) return edge_image def DoG(src, ksize, sigma, thresh=None, alpha=0.01): sigma2 = sigma / 1.6 kernel_1 = genGaussianKernel(ksize=ksize, sigma=sigma) kernel_2 = genGaussianKernel(ksize=ksize, sigma=sigma2) kernel = kernel_1 - kernel_2 DoG_img = cv2.filter2D(src=src, ddepth=cv2.CV_32FC1, kernel=kernel) if thresh is None: thresh = abs(DoG_img).max() * alpha edge_image = zerosCrossing(src=DoG_img, thresh=thresh) return edge_image if __name__ == "__main__": src = cv2.imread('enhance.jpg', 1) plt.subplot(2, 2, 1) plt.imshow(src) plt.axis('off') plt.title('Offical') edge_log = LoG(src=src, ksize=25, alpha=0.05) plt.subplot(2, 2, 2) plt.imshow(edge_log) plt.axis('off') plt.title('LoG') edge_dog = DoG(src=src, ksize=25, sigma=4, alpha=0.1) plt.subplot(2, 2, 3) plt.imshow(edge_dog) plt.axis('off') plt.title('DoG') plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
结果展示:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/69812
推荐阅读
相关标签

