
- 1muduo源码学习 Day04_mud源码
- 2OpenAI-Sora学习手册_openai操作手册
- 3【Kafka】SpringBoot整合Kafka详细介绍及代码示例_springboot kafka 整合
- 4OneNET 第三方数据展示
- 5API网关服务Zuul - Spring Cloud系列(五)_zuul获取eureka 服务名失效
- 6python中round(x、2)是什么意思_round四舍五入详解--python2与python3版本间区别
- 7推荐使用:终极SD超分辨率扩展
- 8x.to(‘cuda‘)或者x.device = ‘cuda‘没有用,无法将数据从CPU放到GPU_为什么我的gpu能用,但是使用to(device)没办法吧变量放在gpu上
- 9Ollama--本地大语言模型LLM运行专家
- 10川大c语言程序设计第二次作业答案,川大《C语言程序设计0008》19春在线作业1
MS5611气压计数据采集(模拟IIC)/温度采集/相对高度求解
赞
踩
原文链接:https://blog.csdn.net/qq_43445076/article/details/110439895
MS5611气压计数据采集(模拟IIC)/温度采集/相对高度求
知识补充-OSR
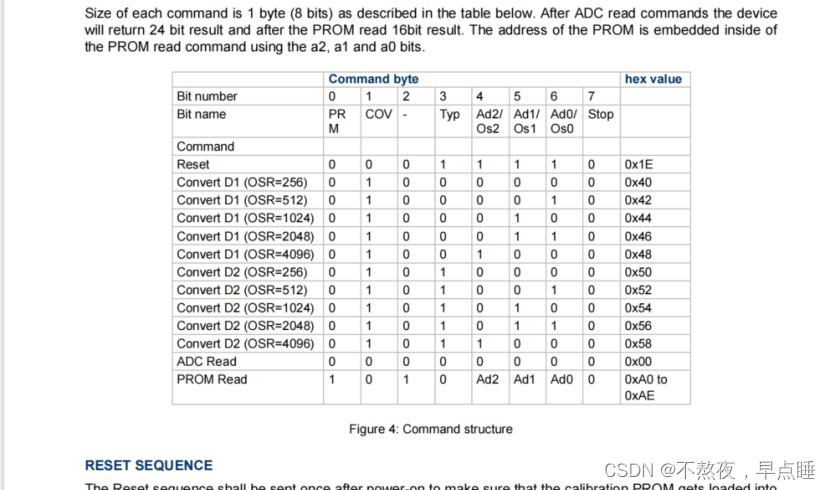
在一些数字信号处理领域的算法或标准中,"Convert D1 (OSR=256)"是一种特定的转换过程。这里的"D1"表示输入信号的数据,"OSR"表示过采样比率(Oversampling Ratio),256表示具体的过采样倍数。
通常情况下,过采样是指在信号采样过程中使用比实际需要更高的采样率。在这种情况下,过采样倍数表示在采样过程中每个原始输入样本被重复采样的次数。
"Convert D1 (OSR=256)"的含义是,对输入信号D1应用一个过采样倍数为256的转换。具体的转换过程可能涉及将输入信号进行重复采样、滤波、放大或其他数字信号处理操作,以实现特定的目标,如降噪、提高分辨率或改善信号质量。
原文链接:https://blog.csdn.net/qq_43509788/article/details/109142401
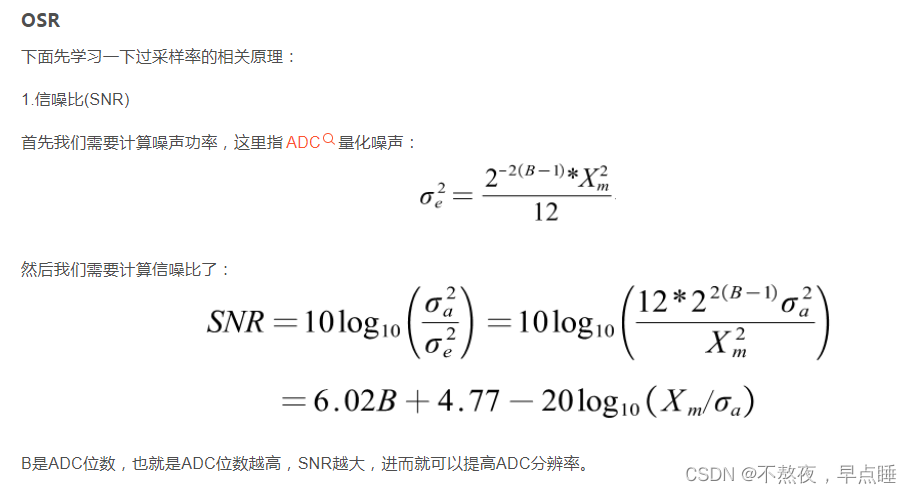
2.过采样
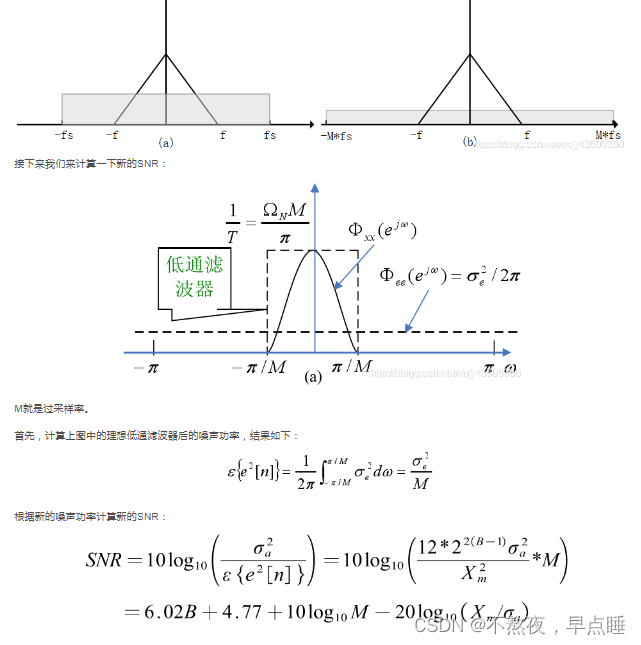
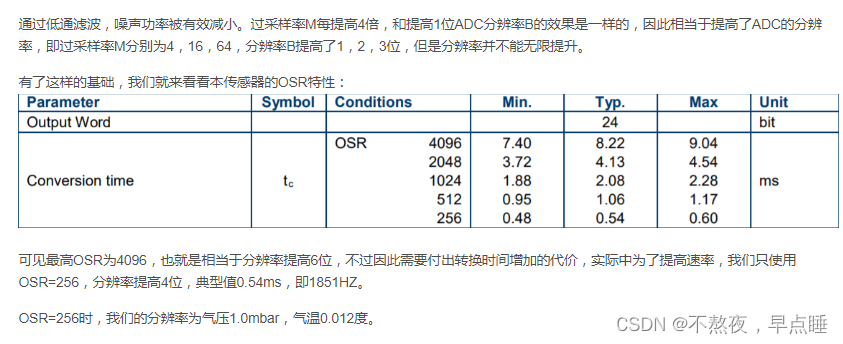
先概括下过采样的原理,ADC的量化噪声功率一定,和采样速率,采样点数无关,在这个前提下提高采样速率,那么从频域看量化噪声的功率密度减小(横坐标拉长,功率面积一定时,纵坐标幅值变小),而信号功率不变,频域中量化噪声和信号重叠部分减小,相当于将很大一部分量化噪声和信号进行了分离,在通过低通滤波器,保留信号部分去除噪声部分,得以有效提高信噪比SNR,进而提高有效位数,提高分辨率。下面通过两张对比图进行介绍。仔细分析图1的(a)和(b),图1是示意图,图1中三角部分信号功率谱密度不变,(b)中的采样率提高后信号功率密度依然不变,噪声的功率不变(灰色矩形面积不变),但是采样率提高后长度变长,因而高度变矮,因此和信号重叠部分减小,在通过理想低通滤波器后,去除大部分噪声,保留信号成分,就能有效提高信噪比,进而提高分辨率。
1、 MS5611气压计属性
1.1 基础属性
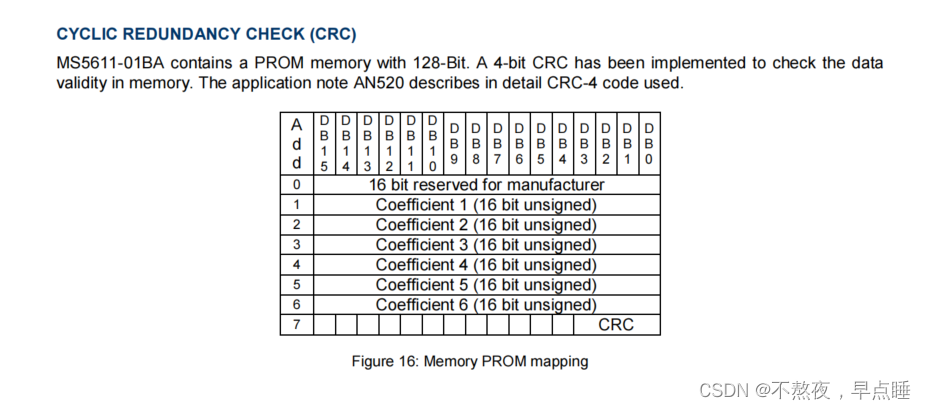
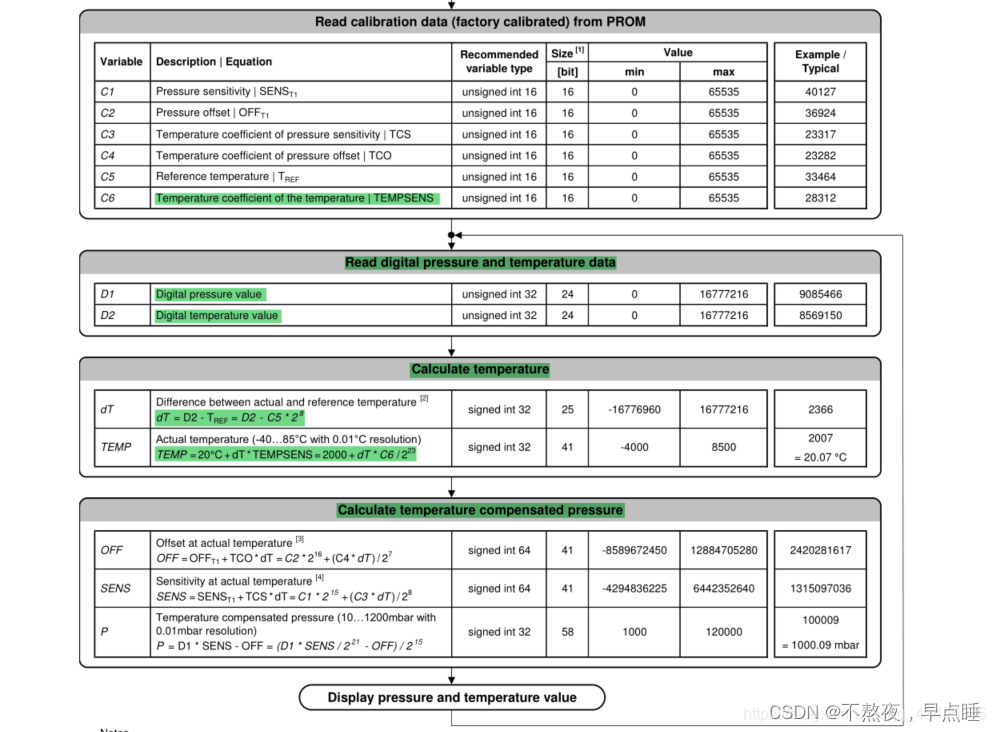
MS5611使用24位ADC,可以采集温度和气压,并且温度可以用来补偿气压,MS5611在出厂时进行了校准,校准的6个系数存储在PROM寄存器中, PROM寄存器起始地址0XA0, 从0xA0到0XAE, 一共16字节, 一共16*8 = 128位,其中每两个字节为一个系数:
第一个系数: 制造商定的,我们不用在意
第二到第七个系数:我们需要读取,后面用于气压计算
第八个系数:CRC
看下面这个图
0xEE //MS5611的地址,也是写的地址 0xEF //MS5611读的地址,读1,写0 IIC从设备地址为111 01110,
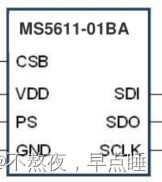
MS5611的I2C地址为0b111011Cx,其中C比特位由CSB引脚决定,为CSB引脚的补码值==(取反)==。GY-86上
MS5611的CSB引脚接地,所以CSB引脚值为0,8位I2C地址为0b1110111x(0xEE),7位I2C地址为
0b1110111(0x77)。
1.2
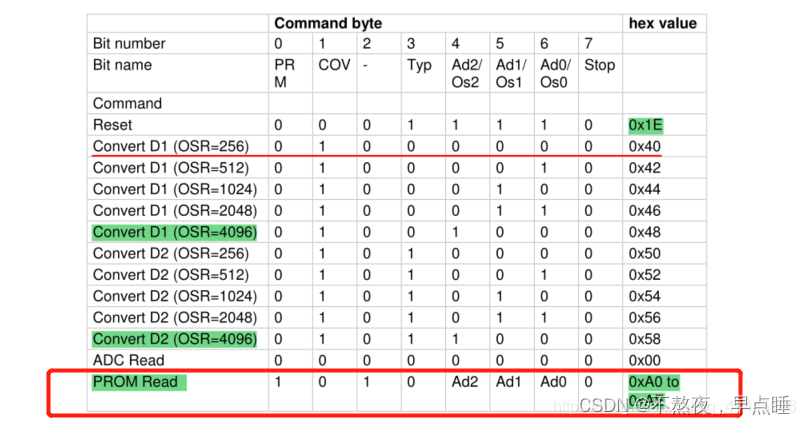
5个命令(COMMANDS)
分别是:
1、复位
2、读取PROM
3、D1转换, 其实就是设置读取气压的一些参数,然后MS5611会返回24字节(下文会说明)
4、D2转换,其实就是设置读取温度的一些参数
5、读取ADC中的数据
PROM读序列,对应手册去看
我们一开始需要确定传感器PROM中的系数值,由于这个值是固定的,只要测出来了就不用再测第二次:
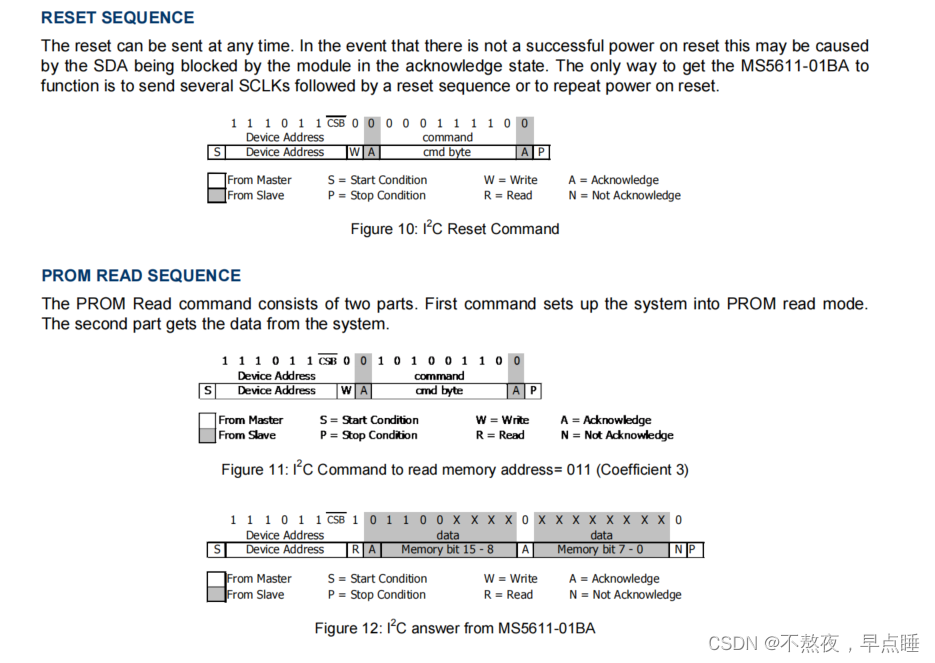
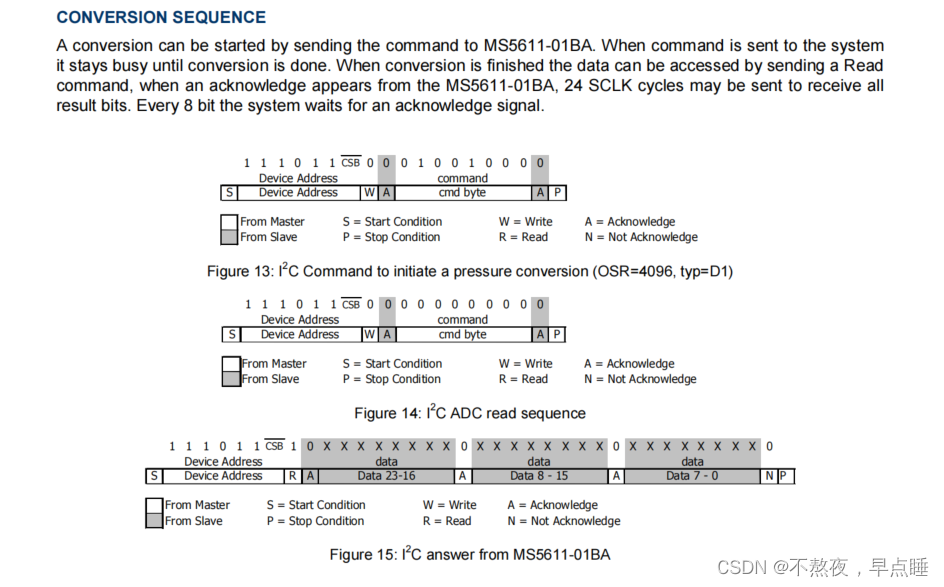
转换序列下面描述了进行一次气压数值转换的过程。
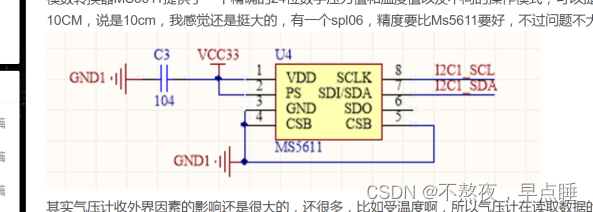
1.3 SPI和IIC接口
IIC模式:PS拉高
SPI模式:PS拉低
本实验用的是模拟IIC读取数据
IIC模式中CSB拉低时, IIC从设备地址为0111 0111, CSB拉高时,IIC设备地址为0111 0110
2、 温度气压读取
IIC开始、结束、等待ack、读取发送函数等(参考匿名)
#define MS5611_ADDR 0x77 //0xee //
#define CMD_RESET 0x1E // ADC reset command
#define CMD_ADC_READ 0x00 // ADC read command
#define CMD_ADC_CONV 0x40 // ADC conversion command
#define CMD_ADC_D1 0x00 // ADC D1 conversion
#define CMD_ADC_D2 0x10 // ADC D2 conversion
#define CMD_ADC_256 0x00 // ADC OSR=256
#define CMD_ADC_512 0x02 // ADC OSR=512
#define CMD_ADC_1024 0x04 // ADC OSR=1024
#define CMD_ADC_2048 0x06 // ADC OSR=2048
#define CMD_ADC_4096 0x08 // ADC OSR=4096
#define CMD_PROM_RD 0xA0 // Prom read command
#define PROM_NB 8
#define MS5611_OSR 0x08 //CMD_ADC_4096
//开始信号
int I2c_Soft_Start()
{
MS5611_IIC_SDA = 1;
MS5611_IIC_SCL = 1;
delay_us(4);
if(!MS5611_READ_SDA)return 0; //SDA线为低电平则总线忙,退出
MS5611_IIC_SDA = 0;
delay_us(4);
if(MS5611_READ_SDA) return 0; //SDA线为高电平则总线出错,退出
MS5611_IIC_SDA = 0;
delay_us(4);
return 1;
}
//结束信号
void I2c_Soft_Stop()
{
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SDA = 0;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
MS5611_IIC_SDA = 1;
delay_us(4);
}
//应答
void I2c_Soft_Ask()
{
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SDA = 0;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
MS5611_IIC_SCL = 0;
delay_us(4);
}
//非应答
void I2c_Soft_NoAsk()
{
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SDA = 1;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
MS5611_IIC_SCL = 0;
delay_us(4);
}
// 等待回复
int I2c_Soft_WaitAsk(void) //返回为:=1无ASK,=0有ASK
{
u8 ErrTime = 0;
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SDA = 1;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
while(MS5611_READ_SDA)
{
ErrTime++;
if(ErrTime>50)
{
I2c_Soft_Stop();
return 1;
}
}
MS5611_IIC_SCL = 0;
delay_us(4);
return 0;
}
// IIC发送一个字节
void I2c_Soft_SendByte(u8 SendByte) //数据从高位到低位//
{
u8 i=8;
while(i--)
{
MS5611_IIC_SCL = 0;
delay_us(4);
if(SendByte&0x80)
MS5611_IIC_SDA = 1;
else
MS5611_IIC_SDA = 0;
SendByte<<=1;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
}
MS5611_IIC_SCL = 0;
}
//读1个字节,ack=1时,发送ACK,ack=0,发送NACK
u8 I2c_Soft_ReadByte(u8 ask) //数据从高位到低位//
{
u8 i=8;
u8 ReceiveByte=0;
MS5611_IIC_SDA = 1;
while(i--)
{
ReceiveByte<<=1;
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
if(MS5611_READ_SDA)
{
ReceiveByte|=0x01;
}
}
MS5611_IIC_SCL = 0;
if (ask)
I2c_Soft_Ask();
else
I2c_Soft_NoAsk();
return ReceiveByte;
}
// IIC写一个字节数据
u8 IIC_Write_1Byte(u8 SlaveAddress,u8 REG_Address,u8 REG_data)
{
I2c_Soft_Start();
I2c_Soft_SendByte(SlaveAddress<<1);
if(I2c_Soft_WaitAsk())
{
I2c_Soft_Stop();
return 1;
}
I2c_Soft_SendByte(REG_Address);
I2c_Soft_WaitAsk();
I2c_Soft_SendByte(REG_data);
I2c_Soft_WaitAsk();
I2c_Soft_Stop();
return 0;
}
// IIC读1字节数据
u8 IIC_Read_1Byte(u8 SlaveAddress,u8 REG_Address,u8 *REG_data)
{
I2c_Soft_Start();
I2c_Soft_SendByte(SlaveAddress<<1);
if(I2c_Soft_WaitAsk())
{
I2c_Soft_Stop();
return 1;
}
I2c_Soft_SendByte(REG_Address);
I2c_Soft_WaitAsk();
I2c_Soft_Start();
I2c_Soft_SendByte(SlaveAddress<<1 | 0x01);
I2c_Soft_WaitAsk();
*REG_data= I2c_Soft_ReadByte(0);
I2c_Soft_Stop();
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
2.1 第一步:初始化MS5611
初始化包括:
1、复位
2、读取PROM中的6个关键系数
// 复位
void MS5611_Reset(void)
{
// MS5611_ADDR:0x77 CMD_RESET:0x1E
IIC_Write_1Byte(MS5611_ADDR, CMD_RESET, 1);
}
u8 MS5611_Read_Prom(void)
{
uint8_t rxbuf[2] = { 0, 0 };
u8 check = 0;
u8 i;
for (i = 0; i < PROM_NB; i++)
{
check += IIC_Read_nByte(MS5611_ADDR, CMD_PROM_RD + i * 2, 2, rxbuf); // send PROM READ command
ms5611_prom[i] = rxbuf[0] << 8 | rxbuf[1];
}
if(check == PROM_NB)
return 1;
else
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
2.2 第二步:获取温度数据

首先发送Convert D2命令,进行相应的配置,再发送ADC Read命令,然后MS5611会返回24位的温度数据, 这时候再去读取这些温度数据。
// 写入数据
void MS5611_Start_T(void)
{
//CMD_ADC_CONV + CMD_ADC_D2 + MS5611_OSR = 0x48
IIC_Write_1Byte(MS5611_ADDR, CMD_ADC_CONV + CMD_ADC_D2 + MS5611_OSR, 1); // D2 (temperature) conversion start!
}
// 读取24位温度数据
void MS5611_Read_Adc_T(void)
{
IIC_Read_nByte( MS5611_ADDR, CMD_ADC_READ, 3, t_rxbuf ); // read ADC
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
2.3 第三步:获取气压数据

首先发送Convert D1命令,进行相应的配置,然后再发送ADC Read命令, 然后MS5611会返回24位的气压数据, 这时候再去读取这些气压数据。
// 写入数据
void MS5611_Start_P(void)
{
CMD_ADC_CONV + CMD_ADC_D1 + MS5611_OSR = 0x58
IIC_Write_1Byte(MS5611_ADDR, CMD_ADC_CONV + CMD_ADC_D1 + MS5611_OSR, 1); // D1 (pressure) conversion start!
}
// 读取24位气压数据
void MS5611_Read_Adc_P(void)
{
IIC_Read_nByte(MS5611_ADDR, CMD_ADC_READ, 3, p_rxbuf); // read ADC
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
3、温度补偿气压
绝对高度(海拔)的求解公式:
H= 44300*(1- (P/P0)^(1/5.256) )
H为高度
P0为标准大气压(≈101Kpa)
P为读取的气压 (注意单位得和P0相同)
相对高度(例如飞机起飞前和飞行中的高度差)的求解
这里提供一个思路:
MS5611开机上电一段时间后,读取静止100组数据并转换成海拔,取个平均,这个海拔高度就相当于基准海拔,如果你把MS5611拿高或者拿低, 此时的海拔与基准海拔相见就是相对高度。
ps:求相对高度的时候,可以对此时的海拔高度数据进行一个滑动窗滤波,这样求出的相对高度比较平滑。
void MS5611_BaroAltCalculate(void)
{
float height = 0;
int64_t off2 = 0, sens2 = 0, delt = 0, f = 0, f2 = 0;
int32_t temperature = 0, pressure = 0, T2 = 0;
int32_t dT = 0;
int64_t off =0, sens =0;
static int num = 0;
static int cnt = 0;
double ms5611SumDat = 0.0;
ms5611_ut = (t_rxbuf[0] << 16) | (t_rxbuf[1] << 8) | t_rxbuf[2]; // 读取的原始温度值
ms5611_up = (p_rxbuf[0] << 16) | (p_rxbuf[1] << 8) | p_rxbuf[2]; // 读取的原始气压值
dT = ms5611_ut - ((uint32_t)ms5611_prom[5] << 8);
off = ((uint64_t)ms5611_prom[2] << 16) + (((int64_t)dT * ms5611_prom[4]) >> 7);
sens = ((uint64_t)ms5611_prom[1] << 15) + (((int64_t)dT * ms5611_prom[3]) >> 8);
// 实际温度: 2007:20.07 ℃
temperature = 2000 + (((int64_t)dT * ms5611_prom[6]) >> 23);
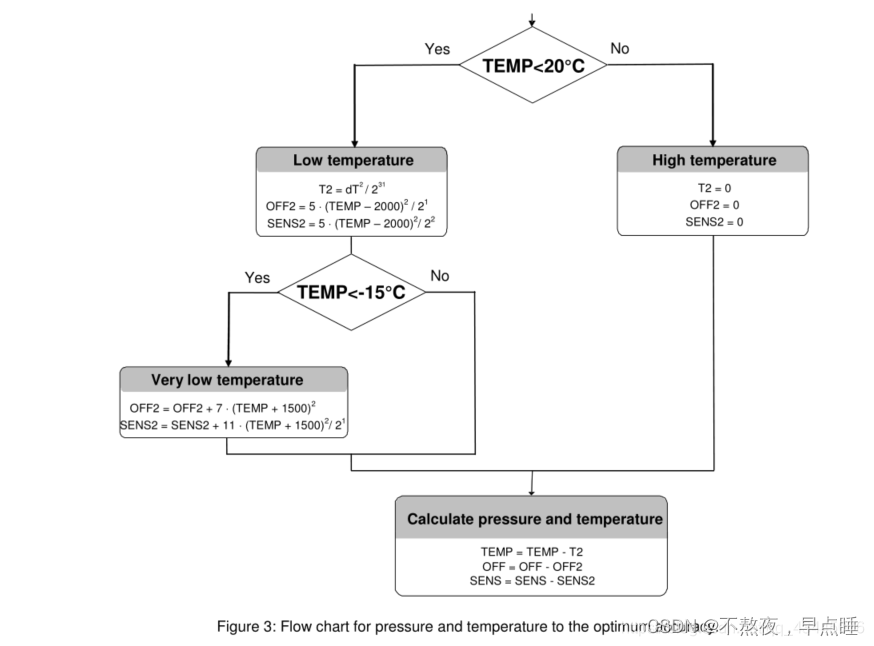
if (temperature < 2000)
{
T2 = (dT*dT)>>31;
delt = temperature - 2000;
delt = delt * delt;
off2 = (5 * delt) >> 1;
sens2 = (5 * delt) >> 2;
if (temperature < -1500)
{
delt = temperature + 1500;
delt = delt * delt;
off2 += 7 * delt;
sens2 += (11 * delt) >> 1;
}
}
temperature -= T2;
off -= off2;
sens -= sens2;
ms5611Data.temperature = (double)temperature / 100.0; // ℃
// 温度补偿后的气压 100009 = 1000.09 mbar = 100009 Pa
pressure = (((ms5611_up * sens ) >> 21) - off) >> 15; // mbar
ms5611Data.pressure = (double)pressure / 100.0;
height = (double)((1.0f - pow((double)pressure / 101325.0f, 0.190295f)) * 44330.0f); // meter
ms5611Data.height = height;
// 求相对高度
// 上电100个数据后
if(num > 100)
{
if(cnt < MS5611_WIN_FILTER)
{
alt[cnt] = ms5611Data.height;
cnt++;
}
else
{
ms5611SumDat = 0.0;
for(int i=0; i<MS5611_WIN_FILTER-1; i++)
{
alt[i] = alt[i+1];
ms5611SumDat += alt[i];
}
alt[cnt-1] = ms5611Data.height;
ms5611SumDat += alt[cnt-1];
ms5611CurAlt = ms5611SumDat/MS5611_WIN_FILTER; // 当前100组数据的高度平均
if(baroCalOk == true)
{
ms5611CurAlt -= ms5611StartAlt; // 当前相对高度
}
}
num = 100;
}
num++;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77


