
- 1如何计算文本之间的相似度?余弦相似度详解!带例子,嘎嘎通俗易懂~_文本相似度余弦相似度案例
- 2WEB系统安全架构需注意的问题
- 3redis哨兵模式(Redis Sentinel)
- 42024年最全【面试】聊聊那些年我们大学校招遇到的面试题(1),头条面试高频算法题
- 5Pixel Link: 探索图像像素级连接的新境界
- 6Redis持久化及其配置_redis中封装的数据用什么间隔
- 7Django REST framework安全实践:轻松实现认证、权限与限流功能_django 接口限流
- 8深度学习之五(递归神经网络--Recursive Neural Networks,RvNNs)附案例代码_recursive neural network (rvnn)
- 9chatgpt赋能python:Python爬取电影资源:快速获取海量资源的神器
- 10CH4 - 流程控制-单元测试 (头歌)_流程控制翻转教学设计头歌答案
MIMO系统中的线性处理: 匹配滤波、迫零滤波与维纳滤波_mimo雷达匹配滤波
赞
踩
前言
这篇博客是对经典论文 Linear Transmit Processing in MIMO Communications Systems的摘记。这篇文章考虑的是收发端的各自独立信号处理设计,而非联合设计。继而,给出了匹配滤波、迫零滤波与维纳滤波这三种常见滤波方式的具体数学形式。
系统模型
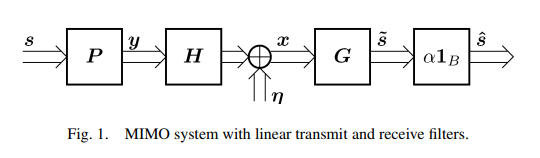
考虑如图所示的一个线性系统模型, 有:
y
=
P
s
∈
C
N
s
~
=
G
(
H
P
s
+
η
)
∈
C
B
\boldsymbol{y}=\boldsymbol{P} \boldsymbol{s} \in \mathbb{C}^{N}\\ \tilde{\boldsymbol{s}}=\boldsymbol{G}(\boldsymbol{H P s}+\boldsymbol{\eta}) \in \mathbb{C}^{B}
y=Ps∈CNs~=G(HPs+η)∈CB
B
B
B代表了数据流数。
N
N
N代表发送天线数,
M
M
M代表接收天线数。需要解释的是, 最后的方框中的
α
1
B
\alpha\mathbf{1}_B
α1B是指将
s
~
\tilde{\boldsymbol{s}}
s~乘上一个标量实数
α
\alpha
α,这对系统性能并不会有任何影响,但会影响发射机的设计,后面将会揭示。
同时,定义平均发送能量为:
E
[
∥
y
∥
2
2
]
=
E
[
∥
P
s
∥
2
2
]
=
tr
(
P
R
s
P
H
)
=
E
t
r
⋅
\mathrm{E}\left[\|\boldsymbol{y}\|_{2}^{2}\right]=\mathrm{E}\left[\|\boldsymbol{P} \boldsymbol{s}\|_{2}^{2}\right]=\operatorname{tr}\left(\boldsymbol{P} \boldsymbol{R}_{\boldsymbol{s}} \boldsymbol{P}^{\mathrm{H}}\right)=E_{\mathrm{tr}} \cdot
E[∥y∥22]=E[∥Ps∥22]=tr(PRsPH)=Etr⋅
信噪比可以定义为 (平均了流数与接收天线数):
γ
=
E
t
r
/
B
tr
(
R
η
)
/
M
\gamma=\frac{E_{\mathrm{tr}} / B}{\operatorname{tr}\left(\boldsymbol{R}_{\boldsymbol{\eta}}\right) / M}
γ=tr(Rη)/MEtr/B
其中
R
η
\boldsymbol{R}_{\boldsymbol{\eta}}
Rη代表噪声的协方差矩阵。
接收滤波
接收匹配滤波
Receive matched filter (RxMF)
RxMF 旨在最大化滤波器
G
G
G的输出信噪比,这在噪声极大的场景下是最优的。具体地:
G
M
F
=
argmax
G
∣
E
[
s
H
s
~
]
∣
2
E
[
∥
G
η
∣
2
2
]
\boldsymbol{G}_{\mathrm{MF}}=\operatorname{argmax}_{G} \frac{\left|\mathrm{E}\left[\boldsymbol{s}^{\mathrm{H}} \tilde{\boldsymbol{s}}\right]\right|^{2}}{\mathrm{E}\left[\|\left.\boldsymbol{G} \boldsymbol{\eta}\right|_{2} ^{2}\right]}
GMF=argmaxGE[∥Gη∣22]∣∣E[sHs~]∣∣2
分子中,通过作相关,提取出处理后信号中包含真实信号信息的能量值,去除掉噪声。 分母则是经过滤波后的噪声能量。因此通过对上式求导置0,得到:
G
M
F
=
α
′
R
s
P
H
H
H
R
η
−
1
∈
C
B
×
M
\boldsymbol{G}_{\mathrm{MF}}=\alpha^{\prime} \boldsymbol{R}_{\boldsymbol{s}} \boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{R}_{\boldsymbol{\eta}}^{-1} \in \mathbb{C}^{B \times M}
GMF=α′RsPHHHRη−1∈CB×M
其中,
α
′
\alpha^{\prime}
α′为标量可以任意选取,并不影响接收信噪比, 因此后文中可置为1. 相关简要推导放在了附录中。观察可以看到, 接收信号抵达接收端时经历了
H
P
HP
HP,则对其的处理就是其转置
P
H
H
H
P^HH^H
PHHH。
接收迫零滤波
Receive Zero-Forcing Filter (RxZF)
迫零均衡的思路很简单,假定没有噪声,令处理后信号与原信号相等。也即:
s
~
∣
η
=
0
M
=
G
H
P
s
≡
s
\left.\tilde{\boldsymbol{s}}\right|_{\eta=\mathbf{0}_{M}}=\boldsymbol{G H P} \boldsymbol{s} \equiv \boldsymbol{s}
s~∣η=0M=GHPs≡s
因此,
G
H
P
G H P
GHP应为单位阵。
E
[
∥
s
−
s
~
∥
2
2
]
=
E
[
∥
G
η
∥
2
2
]
\mathrm{E}\left[\|\boldsymbol{s}-\tilde{\boldsymbol{s}}\|_{2}^{2}\right]=\mathrm{E}\left[\|G \boldsymbol{\eta}\|_{2}^{2}\right]
E[∥s−s~∥22]=E[∥Gη∥22]
因此,RxZF的推导可以通过求解如下问题:
G
Z
F
=
argmin
G
E
[
∥
G
η
∥
2
2
]
s.t.:
G
H
P
=
1
B
\boldsymbol{G}_{\mathrm{ZF}}=\operatorname{argmin}_{\boldsymbol{G}} \mathrm{E}\left[\|\boldsymbol{G} \boldsymbol{\eta}\|_{2}^{2}\right] \quad \text { s.t.: } \boldsymbol{G H} \boldsymbol{P}=\mathbf{1}_{B}
GZF=argminGE[∥Gη∥22] s.t.: GHP=1B
1
B
\mathbf{1}_{B}
1B就是单位阵。该问题可以通过拉格朗日乘子法求解,过程也放在了附录之中。最优解为:
G
Z
F
=
(
P
H
H
H
R
η
−
1
H
P
)
−
1
P
H
H
H
R
η
−
1
∈
C
B
×
M
.
\boldsymbol{G}_{\mathrm{ZF}}=\left(\boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{R}_{\boldsymbol{\eta}}^{-1} \boldsymbol{H} \boldsymbol{P}\right)^{-1} \boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{R}_{\boldsymbol{\eta}}^{-1} \in \mathbb{C}^{B \times M} .
GZF=(PHHHRη−1HP)−1PHHHRη−1∈CB×M.
相较于匹配滤波,这里多了一项
G
Z
F
=
(
P
H
H
H
R
η
−
1
H
P
)
−
1
\boldsymbol{G}_{\mathrm{ZF}}=\left(\boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{R}_{\boldsymbol{\eta}}^{-1} \boldsymbol{H} \boldsymbol{P}\right)^{-1}
GZF=(PHHHRη−1HP)−1,因此迫零滤波可以理解为是匹配滤波后再做了一步干扰消除。当
R
η
\boldsymbol{R}_{\boldsymbol{\eta}}
Rη为单位阵 (或单位阵乘上标量)时,原式就退化为
G
Z
F
=
(
P
H
H
H
H
P
)
−
1
P
H
H
H
\boldsymbol{G}_{\mathrm{ZF}}=\left(\boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{H} \boldsymbol{P}\right)^{-1} \boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}}
GZF=(PHHHHP)−1PHHH。
接收维纳滤波
Receive Wiener Filter (RxWF)
维纳滤波器旨在最小化MSE值,也即:
G
W
F
=
argmin
G
E
[
∥
s
−
s
~
∥
2
2
]
\boldsymbol{G}_{\mathrm{WF}}=\operatorname{argmin}_{\boldsymbol{G}} \mathrm{E}\left[\|\boldsymbol{s}-\tilde{\boldsymbol{s}}\|_{2}^{2}\right]
GWF=argminGE[∥s−s~∥22]
令导数为0,可以得到:
G
W
F
=
(
P
H
H
H
R
η
−
1
H
P
+
R
s
−
1
)
−
1
P
H
H
H
R
η
−
1
\boldsymbol{G}_{\mathrm{WF}}=\left(\boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{R}_{\boldsymbol{\eta}}^{-1} \boldsymbol{H} \boldsymbol{P}+\boldsymbol{R}_{\boldsymbol{s}}^{-1}\right)^{-1} \boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{R}_{\boldsymbol{\eta}}^{-1}
GWF=(PHHHRη−1HP+Rs−1)−1PHHHRη−1
这里运用到了矩阵求逆引理,详见附录。注意到, 当信噪比较低时,
(
P
H
H
H
R
η
−
1
H
P
+
R
s
−
1
)
−
1
\left(\boldsymbol{P}^{\mathrm{H}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{R}_{\boldsymbol{\eta}}^{-1} \boldsymbol{H} \boldsymbol{P}+\boldsymbol{R}_{\boldsymbol{s}}^{-1}\right)^{-1}
(PHHHRη−1HP+Rs−1)−1退化为
R
s
\boldsymbol{R}_{\boldsymbol{s}}
Rs,维纳滤波器退化为匹配滤波。当信噪比较高时,退化为迫零滤波。
发送滤波
发送匹配滤波
类似地,可以通过如下优化问题求解:
P
M
F
=
argmax
P
∣
E
[
s
H
s
~
]
∣
2
E
[
∥
G
η
∣
∣
2
2
]
s.t.:
E
[
∥
P
s
∥
2
2
]
=
E
t
r
\boldsymbol{P}_{\mathrm{MF}}=\operatorname{argmax}_{\boldsymbol{P}} \frac{\left|\mathrm{E}\left[\boldsymbol{s}^{\mathrm{H}} \tilde{\boldsymbol{s}}\right]\right|^{2}}{\mathrm{E}\left[\| \boldsymbol{G} \boldsymbol{\eta}||_{2}^{2}\right]} \quad \text { s.t.: } \mathrm{E}\left[\|\boldsymbol{P} \boldsymbol{s}\|_{2}^{2}\right]=E_{\mathrm{tr}}
PMF=argmaxPE[∥Gη∣∣22]∣∣E[sHs~]∣∣2 s.t.: E[∥Ps∥22]=Etr
这比接收滤波要容易求解因为分母是一个常数,直接通过拉格朗日乘子法可以得到:
P
M
F
=
β
T
x
M
F
H
H
G
H
∈
C
N
×
B
β
T
x
M
F
=
E
t
r
tr
(
H
H
G
H
R
s
G
H
)
可以看到,发送匹配滤波和接收匹配滤波一样,都是信号接下来要经过的线性变换的共轭转置。
发送迫零滤波
与接收迫零滤波不同的时,此时除了令
G
H
P
GHP
GHP为单位阵外,也期望最小化发送功率,因此优化问题可以表示为:
P
~
Z
F
=
argmin
P
E
[
∥
P
s
∥
2
2
]
s.t.:
G
H
P
=
1
B
\widetilde{\boldsymbol{P}}_{\mathrm{ZF}}=\operatorname{argmin}_{\boldsymbol{P}} \mathrm{E}\left[\|\boldsymbol{P s}\|_{2}^{2}\right] \quad \text { s.t.: } \boldsymbol{G H} \boldsymbol{P}=\mathbf{1}_{B}
P
ZF=argminPE[∥Ps∥22] s.t.: GHP=1B
通过拉格朗日乘子法可以得到:
P
~
Z
F
=
H
H
G
H
(
G
H
H
H
G
H
)
−
1
∈
C
N
×
B
.
\tilde{\boldsymbol{P}}_{\mathrm{ZF}}=\boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}}\left(\boldsymbol{G} \boldsymbol{H} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}}\right)^{-1} \in \mathbb{C}^{N \times B} .
P~ZF=HHGH(GHHHGH)−1∈CN×B.
然而这一解并不一定能满足功率约束。因此一种直觉的做法就是引入一个常数标量进行归一化。即:
P
Z
F
=
β
T
x
Z
F
H
H
G
H
(
G
H
H
H
G
H
)
−
1
∈
C
N
×
B
\boldsymbol{P}_{\mathrm{ZF}}=\beta_{\mathrm{TxZF}} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}}\left(\boldsymbol{G} \boldsymbol{H} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}}\right)^{-1} \in \mathbb{C}^{N \times B}
PZF=βTxZFHHGH(GHHHGH)−1∈CN×B
其中,
β
T
x
Z
F
=
E
t
r
tr
(
(
G
H
H
H
G
H
)
−
1
R
s
)
\beta_{\mathrm{TxZF}}=\sqrt{\frac{E_{\mathrm{tr}}}{\operatorname{tr}\left(\left(\boldsymbol{G H \boldsymbol { H } ^ { \mathrm { H } } \boldsymbol { G } ^ { \mathrm { H } } ) ^ { - 1 } \boldsymbol { R } _ { \boldsymbol { s } } )}\right.\right.}}
βTxZF=tr((GHHHGH)−1Rs)Etr
发送维纳滤波
假如仍以基本的MMSE为目标,维纳滤波的解由下式给出:
P
C
M
M
S
E
=
argmin
P
E
[
∥
s
−
s
~
∥
2
2
]
s.t.:
E
[
∥
P
s
∥
2
2
]
≤
E
t
r
⋅
\boldsymbol{P}_{\mathrm{CMMSE}}=\operatorname{argmin}_{\boldsymbol{P}} \mathrm{E}\left[\|\boldsymbol{s}-\tilde{\boldsymbol{s}}\|_{2}^{2}\right] \quad \text { s.t.: } \mathrm{E}\left[\|\boldsymbol{P} \boldsymbol{s}\|_{2}^{2}\right] \leq E_{\mathrm{tr}} \cdot
PCMMSE=argminPE[∥s−s~∥22] s.t.: E[∥Ps∥22]≤Etr⋅
其解为:
P
C
M
M
S
E
=
(
H
H
G
H
G
H
+
λ
1
N
)
−
1
H
H
G
H
∈
C
N
×
B
\boldsymbol{P}_{\mathrm{CMMSE}}=\left(\boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}} \boldsymbol{G} \boldsymbol{H}+\lambda \mathbf{1}_{N}\right)^{-1} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}} \in \mathbb{C}^{N \times B}
PCMMSE=(HHGHGH+λ1N)−1HHGH∈CN×B
其中
λ
\lambda
λ为拉格朗日乘子,用以满足功率约束。然而问题来了,此时发现
λ
\lambda
λ只与发送功率有关。当发送功率较大但噪声功率更大的低信噪比情况下,维纳滤波器仍会迫近与迫零滤波。根据push-through公式,有:
(
H
H
G
H
G
H
+
λ
1
N
)
−
1
H
H
G
H
=
H
H
G
H
(
G
H
H
H
G
H
+
λ
1
N
)
−
1
\left(\boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}} \boldsymbol{G} \boldsymbol{H}+\lambda \mathbf{1}_{N}\right)^{-1} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}} =\boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}}\left(\boldsymbol{G} \boldsymbol{H}\boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}} +\lambda \mathbf{1}_{N}\right)^{-1}
(HHGHGH+λ1N)−1HHGH=HHGH(GHHHGH+λ1N)−1
也就是说,这样的滤波器并不具备考虑噪声的能力。
因此,进行改进,求解如下问题:
{
P
W
F
,
β
T
x
W
F
}
=
argmin
{
P
,
β
}
E
[
∥
s
−
β
−
1
s
~
∥
2
2
]
s.t.:
E
[
∥
P
s
∥
2
2
]
=
E
t
r
.
引入了标量因子
β
\beta
β,可以理解为接收机要将最后得到的信号除以
β
\beta
β。那么,
β
\beta
β将是越大越好的。因为如果发送滤波得到了更大的
β
\beta
β,意味着最后除掉时将噪声的能量也降低了。因此,问题成了寻找满足上述优化问题的
P
P
P和最大的
β
\beta
β,通过拉格朗日乘子法,得到:
P
W
F
=
β
T
x
W
F
F
−
1
H
H
G
H
∈
C
N
×
B
\boldsymbol{P}_{\mathrm{WF}}=\beta_{\mathrm{TxWF}} \boldsymbol{F}^{-1} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}} \in \mathbb{C}^{N \times B}
PWF=βTxWFF−1HHGH∈CN×B
and
β
T
x
W
F
=
E
t
r
tr
(
F
−
2
H
H
G
H
R
s
G
H
)
\beta_{\mathrm{TxWF}}=\sqrt{\frac{E_{\mathrm{tr}}}{\operatorname{tr}\left(\boldsymbol{F}^{-2} \boldsymbol{H}^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}} \boldsymbol{R}_{\boldsymbol{s}} \boldsymbol{G H}\right)}}
βTxWF=tr(F−2HHGHRsGH)Etr
where we defined
F
=
H
H
G
H
G
H
+
tr
(
G
R
η
G
H
)
E
t
r
1
N
∈
C
N
×
N
\boldsymbol{F}=H^{\mathrm{H}} \boldsymbol{G}^{\mathrm{H}} \boldsymbol{G} H+\frac{\operatorname{tr}\left(\boldsymbol{G} \boldsymbol{R}_{\eta} \boldsymbol{G}^{\mathrm{H}}\right)}{E_{\mathrm{tr}}} \mathbf{1}_{N} \in \mathbb{C}^{N \times N}
F=HHGHGH+Etrtr(GRηGH)1N∈CN×N
可以看到,它与不引入
β
\beta
β时的维纳滤波的差别在于,此时没有了拉格朗日乘子,且解与信噪比直接相关。
性能结果

附录
接收匹配滤波推导

接收迫零滤波推导

接收维纳滤波推导

其中的求逆公式参照博客: https://zhuyulab.blog.csdn.net/article/details/118761178?spm=1001.2014.3001.5502

