
热门标签
热门文章
- 1TCP请求如何获取客户端真实源IP地址_tcp连接怎么获取对方ip
- 2(一)HDFS总体架构_hdfs的总体架构,并对每部分进行认知描述
- 3springsecurity+oauth2.0 分布式认证授权-order资源服务器的配置4_enableresourceserver
- 4Java程序员必备的50道Kafka面试题及解析,面试再也不怕问Kafka了_java kafka高级面试题
- 5图解 MySQL 索引:B-树、B+树_mysql b+树
- 6java豆瓣查书api_如何通过豆瓣API获取图书和电影列表
- 7哈希(Hash)与加密(Encrypt)的基本原理、区别及工程应用_encrypt和hex
- 8XSS 攻击_xss攻击代码
- 9数据结构:队列的详解_数据结构队列详细讲解
- 10把docker从c盘安装到d盘_docker安装到d盘
当前位置: article > 正文
yolov8-obb 旋转目标检测 瑞芯微RKNN芯片部署、地平线Horizon芯片部署、TensorRT部署_rknn yolov8 obb
作者:小桥流水78 | 2024-08-12 03:09:24
赞
踩
rknn yolov8 obb
特别说明:参考官方开源的yolov8代码、瑞芯微官方文档、地平线的官方文档,如有侵权告知删,谢谢。
模型和完整仿真测试代码,放在github上参考链接 模型和代码。
折腾旋转目标检测的小伙伴们看过来,yolov8旋转目标检测部署来了。之前一直想玩一下旋转目标检测,迟迟未动手,看到yolov8可以进行旋转目标检测,最近也一直在折腾yolov8,就拿来再整一下yolov8的旋转目标检测。
1 模型和训练
老规矩只搞部署,训练参考官方开源的yolov8代码。
2 导出 onnx
导出onnx增加以下几行代码:
第一处增加:

# 导出 onnx 增加
y = []
for i in range(self.nl):
t1 = self.cv2[i](x[i])
t2 = self.cv3[i](x[i])
y.append(t1)
y.append(t2)
return y
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
第二处增加:
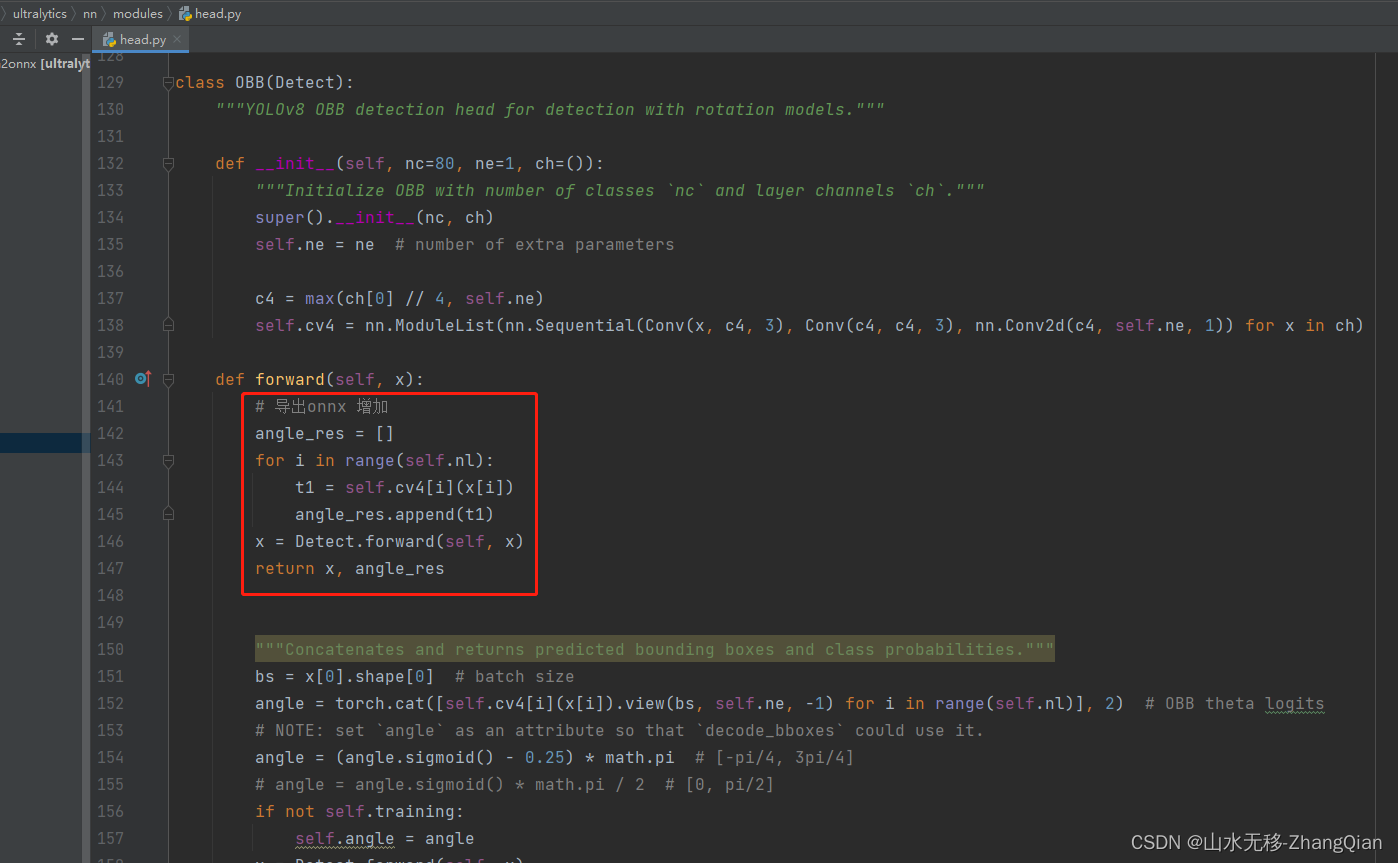
# 导出onnx 增加
angle_res = []
for i in range(self.nl):
t1 = self.cv4[i](x[i])
angle_res.append(t1)
x = Detect.forward(self, x)
return x, angle_res
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
第三处增加保存onnx代码
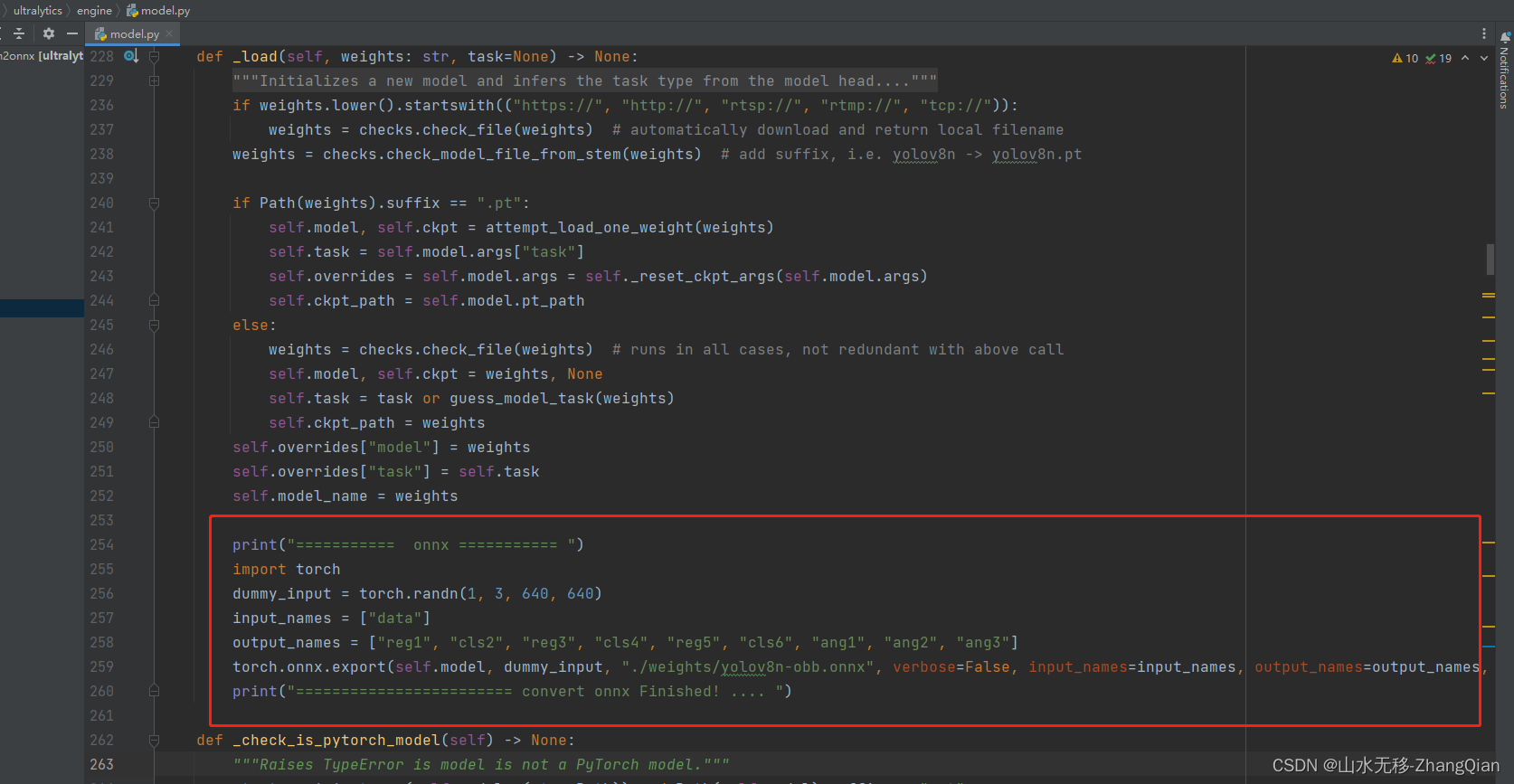
print("=========== onnx =========== ")
import torch
dummy_input = torch.randn(1, 3, 640, 640)
input_names = ["data"]
output_names = ["reg1", "cls2", "reg3", "cls4", "reg5", "cls6", "ang1", "ang2", "ang3"]
torch.onnx.export(self.model, dummy_input, "./weights/yolov8n-obb.onnx", verbose=False, input_names=input_names, output_names=output_names, opset_version=11)
print("======================== convert onnx Finished! .... ")
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
以上三处增加完,运行以下代码(运行会报错,但不影响onnx文件的生成)
from ultralytics import YOLO
# Load a model
model = YOLO("./weights/yolov8n-obb.pt")
results = model(task='detect', mode='predict', source='./test.jpg', imgsz=640, line_width=3, show=True, save=True, device='cpu')
- 1
- 2
- 3
- 4
- 5
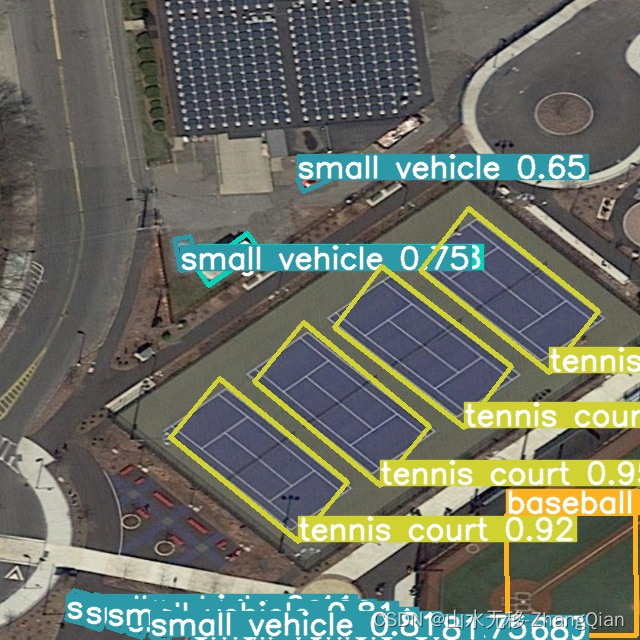
3 测试效果
pytorch效果
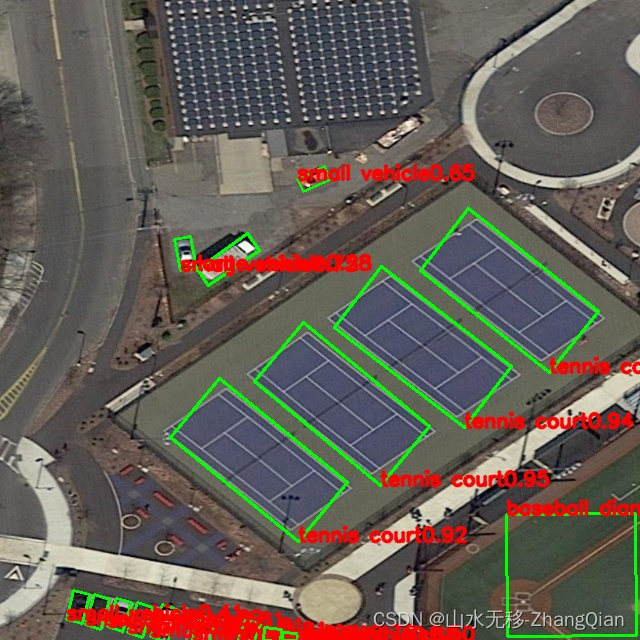
onnx 效果
4 rk3588部署完整代码
板端效果

板端时耗(芯片rk3588,模型输入640x640,检测类别15类)

推荐阅读
相关标签

