- 1rabbitmq简介与布署
- 2时钟及时钟域
- 3practice之Python爬取有道翻译页面_爬取有道在线翻译网站,实现翻译的过程,输出爬取到的信息
- 4Redis之哈希类型
- 5NLP之NER:商品标题属性识别探索与实践
- 6【SpringBoot WEB 系列】SSE 服务器发送事件详解_sseemitter.send
- 7TunesKit Spotify Converter Mac(Spotify音乐转换工具) v1.5.1激活版_tunepat any audiobook converter(有声书转换器) v 1.2.1激活版
- 8大模型 Advanced-RAG(高级检索增强生成):从理论到 LlamaIndex 实战!_rag检索增强生成代码
- 9mysql delete性能,MYSQL delete性能优化!
- 10android home键流程分析_android presshome
RT-Thread实战笔记|LD3320非限定词条语音控制器使用详解_ld3320语音识别算法
赞
踩
视频演示:
【Rt-thread平台使用LD3320语音识别控制器-哔哩哔哩】https://b23.tv/5m9OXt
前言
物联网设计这么火了,这么能离得开语音控制,搭载上国产物联网操作系统RT-Thread,本期跟小飞哥一起学习RT-Thread SPI设备驱动的使用,如何在RT-Thread系统上操作LD3320。
SPI通讯协议介绍
注:此部分摘自rt-thread官网
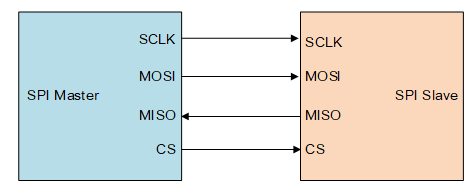
SPI(Serial Peripheral Interface,串行外设接口)是一种高速、全双工、同步通信总线,常用于短距离通讯,主要应用于 EEPROM、FLASH、实时时钟、AD 转换器、还有数字信号处理器和数字信号解码器之间。SPI 一般使用 4 根线通信,如下图所示:
-
MOSI –主机输出 / 从机输入数据线(SPI Bus Master Output/Slave Input)。
-
MISO –主机输入 / 从机输出数据线(SPI Bus Master Input/Slave Output)。
-
SCLK –串行时钟线(Serial Clock),主设备输出时钟信号至从设备。
-
CS –从设备选择线 (Chip select)。也叫 SS、CSB、CSN、EN 等,主设备输出片选信号至从设备。
SPI 以主从方式工作,通常有一个主设备和一个或多个从设备。通信由主设备发起,主设备通过 CS 选择要通信的从设备,然后通过 SCLK 给从设备提供时钟信号,数据通过 MOSI 输出给从设备,同时通过 MISO 接收从设备发送的数据。
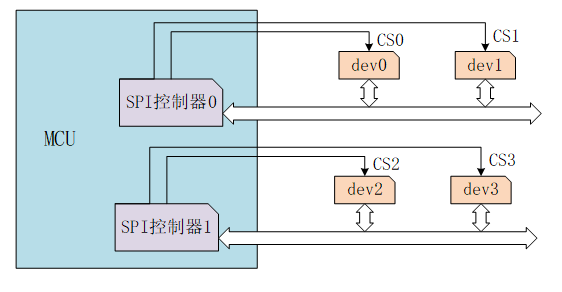
如下图所示芯片有 2 个 SPI 控制器,SPI 控制器对应 SPI 主设备,每个 SPI 控制器可以连接多个 SPI 从设备。挂载在同一个 SPI 控制器上的从设备共享 3 个信号引脚:SCK、MISO、MOSI,但每个从设备的 CS 引脚是独立的。
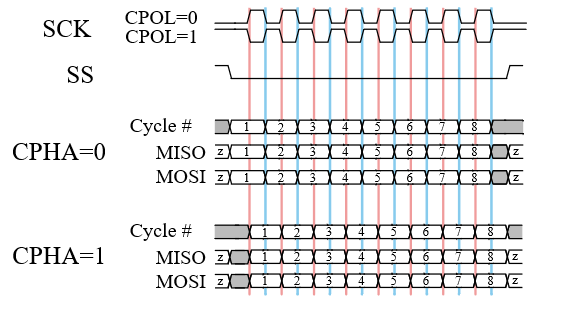
从设备的时钟由主设备通过 SCLK 提供,MOSI、MISO 则基于此脉冲完成数据传输。SPI 的工作时序模式由 CPOL(Clock Polarity,时钟极性)和 CPHA(Clock Phase,时钟相位)之间的相位关系决定,CPOL 表示时钟信号的初始电平的状态,CPOL 为 0 表示时钟信号初始状态为低电平,为 1 表示时钟信号的初始电平是高电平。CPHA 表示在哪个时钟沿采样数据,CPHA 为 0 表示在首个时钟变化沿采样数据,而 CPHA 为 1 则表示在第二个时钟变化沿采样数据。
根据 CPOL 和 CPHA 的不同组合共有 4 种工作时序模式:
-
CPOL=0,CPHA=0
-
CPOL=0,CPHA=1
-
CPOL=1,CPHA=0
-
CPOL=1,CPHA=1。如下图所示:
RT-Thread IIC设备驱动使用
1、挂载SPI设备
函数原型:
- rt_err_t rt_spi_bus_attach_device(struct rt_spi_device *device,
- const char *name,
- const char *bus_name,
- void *user_data)
| 参数 | 描述 |
|---|---|
| device | SPI设备名称 |
| name | SPI设备名称 |
| bus_name | SPI总线名称 |
| user_data | 用户数据指针 |
| 返回 | -- |
| busRET_EOK_name | 成功 |
| 其他错误码 | 失败 |
此函数主要是用来挂载一个 SPI 设备到指定的 SPI 总线,并向内核注册 SPI 设备,并将 user_data 保存到 SPI 设备的控制块里。
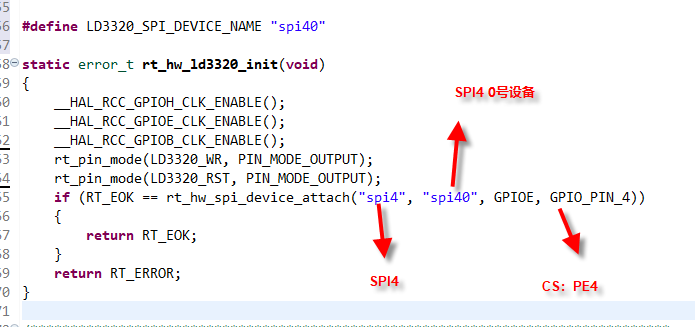
一般 SPI 总线命名原则为 spix, SPI 设备命名原则为 spixy ,如 spi10 表示挂载在 spi1 总线上的 0 号设备。user_data 一般为 SPI 设备的 CS 引脚指针,进行数据传输时 SPI 控制器会操作此引脚进行片选。
光说不练假把式,结合我们本次要操作的LD3320驱动来看看这个函数如何使用
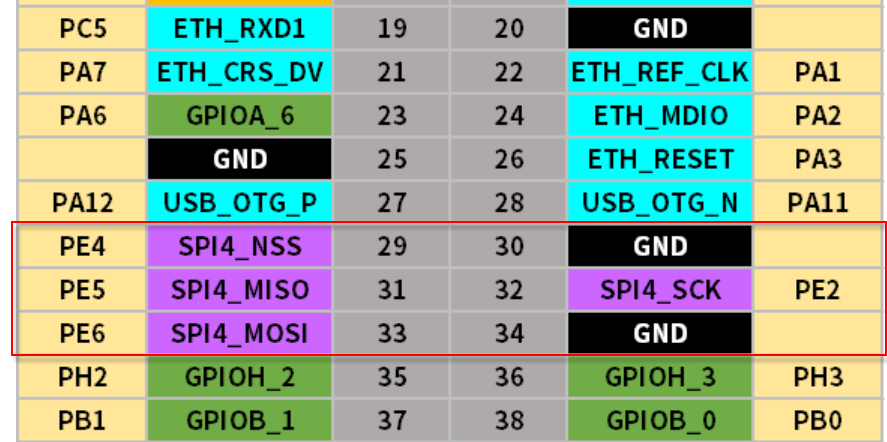
我们以SPI4为例,CS引脚选择PE4
配置SPI
主要涉及SPI通讯模式,最大通讯速率,数据模式等参数,具体怎么配置看从机是什么模式,讲究个主从匹配。
挂载 SPI 设备到 SPI 总线后需要配置 SPI 设备的传输参数。
函数原型:
- rt_err_t rt_spi_configure(struct rt_spi_device *device,
- struct rt_spi_configuration *cfg)
| 参数 | 描述 |
|---|---|
| device | SPI 设备句柄 |
| cfg | SPI 配置参数指针 |
| 返回 | --- |
| RT_EOK | 成功 |
这部分就类似于我们的cubemx中关于SPI的配置,参数在struct rt_spi_configuration 结构体中原型如下:
- struct rt_spi_configuration
- {
- rt_uint8_t mode; /* 模式 */
- rt_uint8_t data_width; /* 数据宽度,可取8位、16位、32位 */
- rt_uint16_t reserved; /* 保留 */
- rt_uint32_t max_hz; /* 最大频率 */
- };
模式:包含 MSB/LSB、主从模式、 时序模式等,可取宏组合如下:
- /* 设置数据传输顺序是MSB位在前还是LSB位在前 */
- #define RT_SPI_LSB (0<<2) /* bit[2]: 0-LSB */
- #define RT_SPI_MSB (1<<2) /* bit[2]: 1-MSB */
-
- /* 设置SPI的主从模式 */
- #define RT_SPI_MASTER (0<<3) /* SPI master device */
- #define RT_SPI_SLAVE (1<<3) /* SPI slave device */
-
- /* 设置时钟极性和时钟相位 */
- #define RT_SPI_MODE_0 (0 | 0) /* CPOL = 0, CPHA = 0 */
- #define RT_SPI_MODE_1 (0 | RT_SPI_CPHA) /* CPOL = 0, CPHA = 1 */
- #define RT_SPI_MODE_2 (RT_SPI_CPOL | 0) /* CPOL = 1, CPHA = 0 */
- #define RT_SPI_MODE_3 (RT_SPI_CPOL | RT_SPI_CPHA) /* CPOL = 1, CPHA = 1 */
-
- #define RT_SPI_CS_HIGH (1<<4) /* Chipselect active high */
- #define RT_SPI_NO_CS (1<<5) /* No chipselect */
- #define RT_SPI_3WIRE (1<<6) /* SI/SO pin shared */
- #define RT_SPI_READY (1<<7) /* Slave pulls low to pause */

-
数据宽度:根据 SPI 主设备及 SPI 从设备可发送及接收的数据宽度格式设置为8位、16位或者32位。
-
最大频率:设置数据传输的波特率,同样根据 SPI 主设备及 SPI 从设备工作的波特率范围设置。
配置示例如下所示(具体根据设备要求):
- struct rt_spi_configuration cfg;
- cfg.data_width = 8;
- cfg.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB;
- cfg.max_hz = 20 * 1000 *1000; /* 20M */
-
- rt_spi_configure(spi_dev, &cfg);
访问 SPI 设备
一般情况下 MCU 的 SPI 器件都是作为主机和从机通讯,在 RT-Thread 中将 SPI 主机虚拟为 SPI 总线设备,应用程序使用 SPI 设备管理接口来访问 SPI 从机器件,主要接口如下所示:
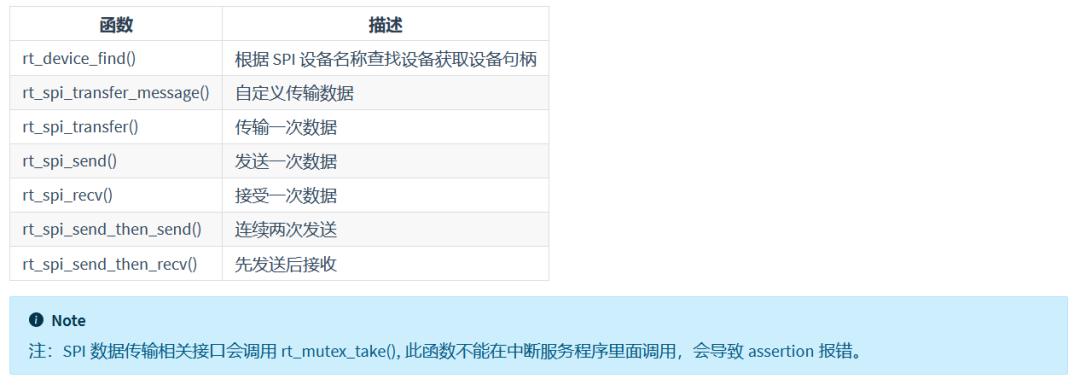
发送、接收函数有好几个,但基础函数是send和receive两个,就不再占用篇幅,一一介绍了,后面会主要看下rt_spi_transfer_message() 自定义数据传输函数,一定要注意,SPI相关的函数不要再中断中调用
-
查找 SPI 设备
和前面章节:IIC设备驱动详解 一样,SPI也是要先查找SPI设备:
rt_device_t rt_device_find(const char* name);
| 参数 | 描述 |
|---|---|
| name | 设备名称 |
| 返回 | --- |
| 设备句柄 | 查找到对应设备将返回相应的设备句柄 |
| RT_NULL | 没有找到相应的设备对象 |
结合LD3320,定义SPI名称为SPI4,看代码:
- struct rt_spi_device *spi_dev_ld3320;
- spi_dev_ld3320 = (struct rt_spi_device *)rt_device_find(name);
- if (!spi_dev_ld3320)
- {
- rt_kprintf("spi sample run failed! can't find %s device!\n", name);
- }
- else
- {
- rt_kprintf("spi sample run success!find %s device!\n", name);
- }
-
自定义传输数据
struct rt_spi_message *rt_spi_transfer_message(struct rt_spi_device *device,struct rt_spi_message *message);

此函数可以传输一连串消息,用户可以自定义每个待传输的 message 结构体各参数的数值,从而可以很方便的控制数据传输方式。struct rt_spi_message 原型如下:
- struct rt_spi_message
- {
- const void *send_buf; /* 发送缓冲区指针 */
- void *recv_buf; /* 接收缓冲区指针 */
- rt_size_t length; /* 发送 / 接收 数据字节数 */
- struct rt_spi_message *next; /* 指向继续发送的下一条消息的指针 */
- unsigned cs_take : 1; /* 片选选中 */
- unsigned cs_release : 1; /* 释放片选 */
- };
sendbuf 为发送缓冲区指针,其值为 RT_NULL 时,表示本次传输为只接收状态,不需要发送数据。
recvbuf 为接收缓冲区指针,其值为 RT_NULL 时,表示本次传输为只发送状态,不需要保存接收到的数据,所以收到的数据直接丢弃。
length 的单位为 word,即数据长度为 8 位时,每个 length 占用 1 个字节;当数据长度为 16 位时,每个 length 占用 2 个字节。
参数 next 是指向继续发送的下一条消息的指针,若只发送一条消息,则此指针值为 RT_NULL。多个待传输的消息通过 next 指针以单向链表的形式连接在一起。
cs_take 值为 1 时,表示在传输数据前,设置对应的 CS 为有效状态。cs_release 值为 1 时,表示在数据传输结束后,释放对应的 CS。
注:* 当 send_buf 或 recv_buf 不为空时,两者的可用空间都不得小于 length。* 若使用此函数传输消息,传输的第一条消息 cs_take 需置为 1,设置片选为有效,最后一条消息的 cs_release 需置 1,释放片选。
具体如何使用,在后面详细介绍
SPI的原理以及一些基本的函数、参数介绍就这样了,小伙伴们也可以去rt-thread官网查看
LD3320简介
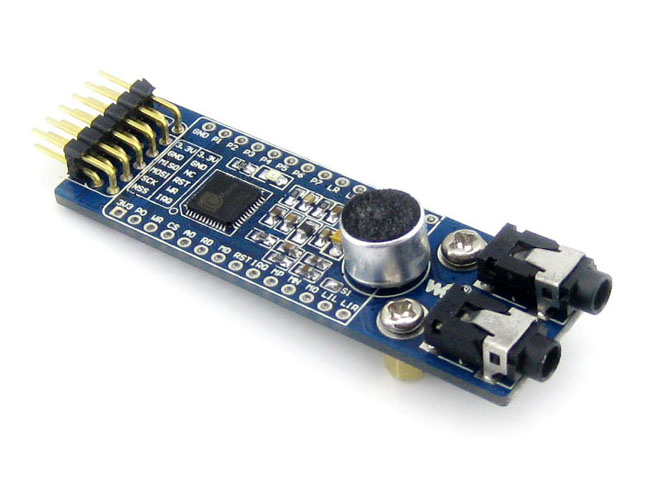
某宝买的,价格挺贵,功能也挺多,语音播放、录放音、语音识别等等,关于LD3320的资料介绍实在是太多了,下面主要介绍几点:
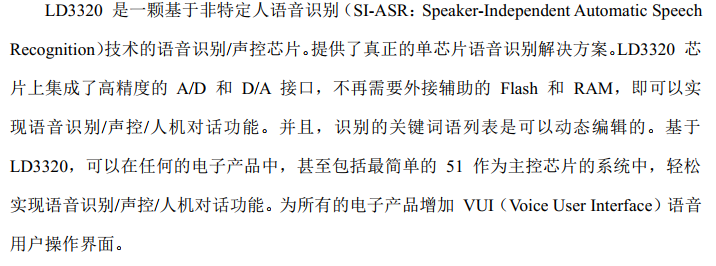
芯片介绍
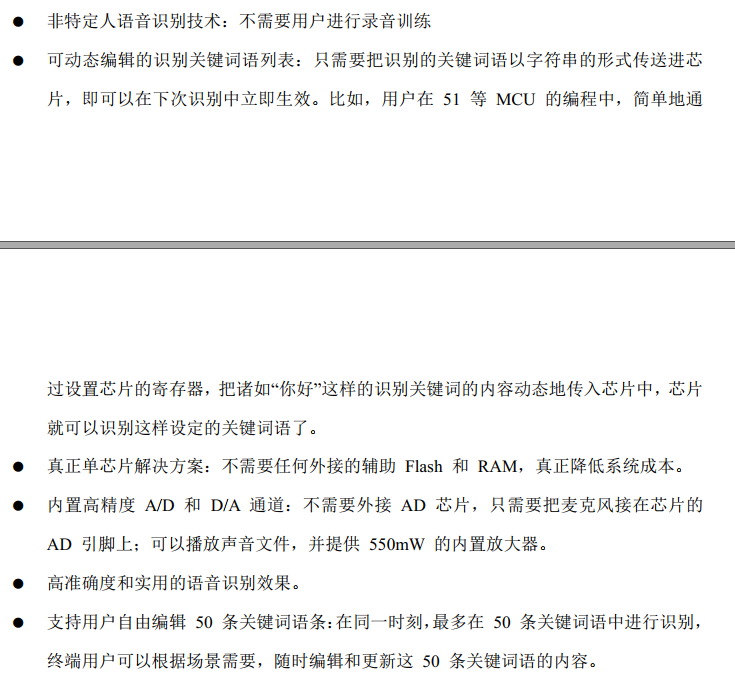
主要特色功能
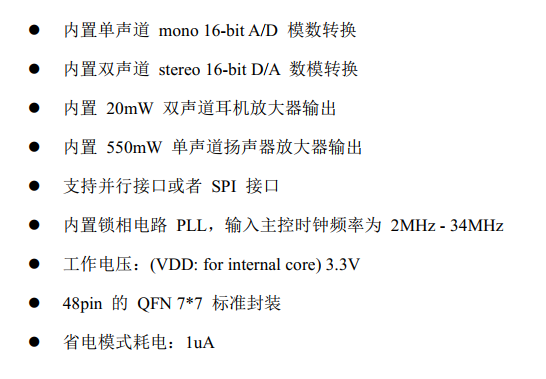
主要技术参数
模块原理图
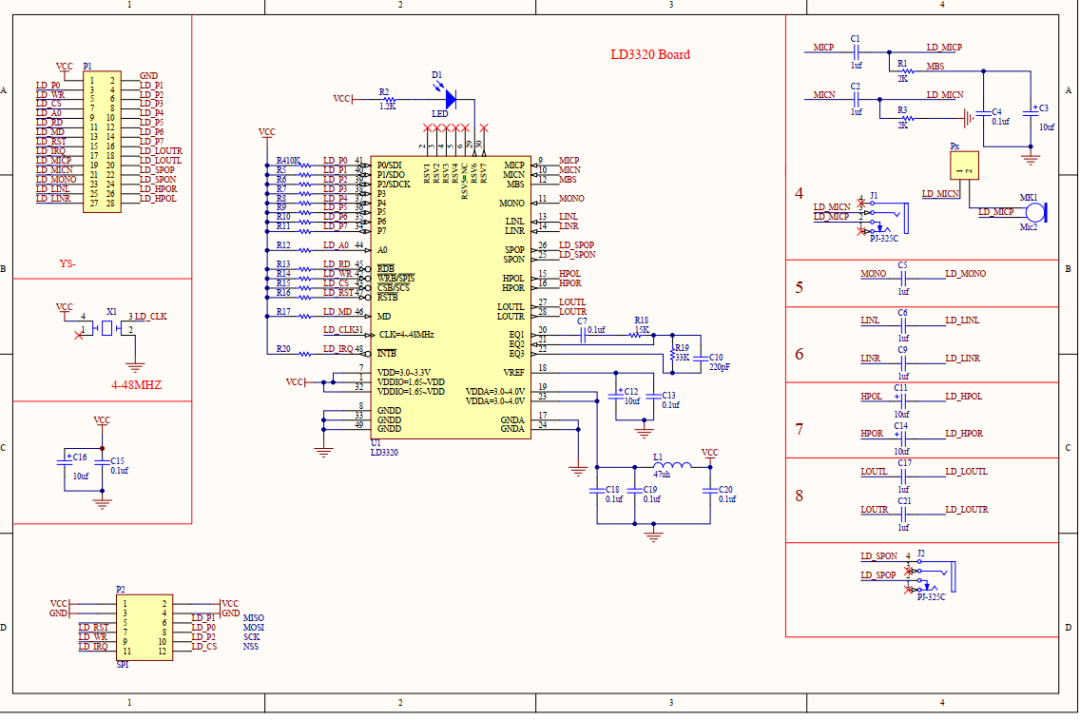
串行驱动时序
标准的SPI协议,看一下即可...
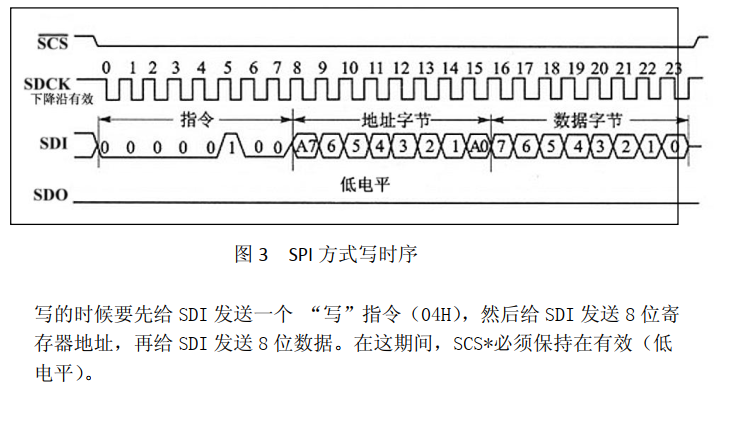
写时序:
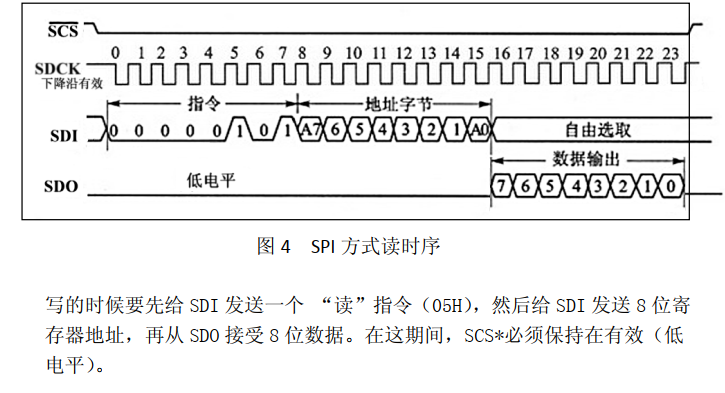
读时序:
代码编写
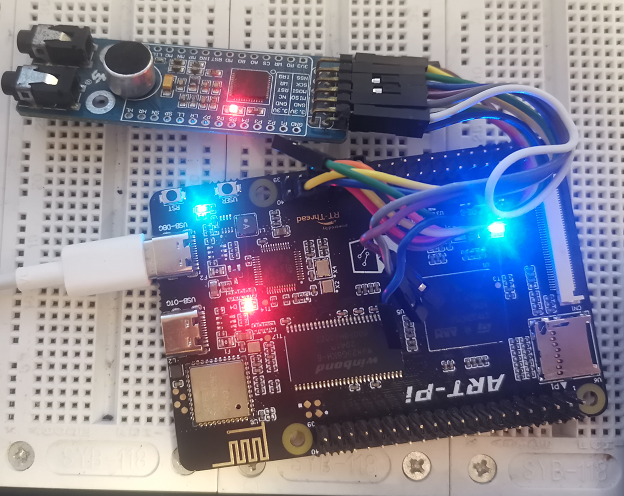
硬件连接:
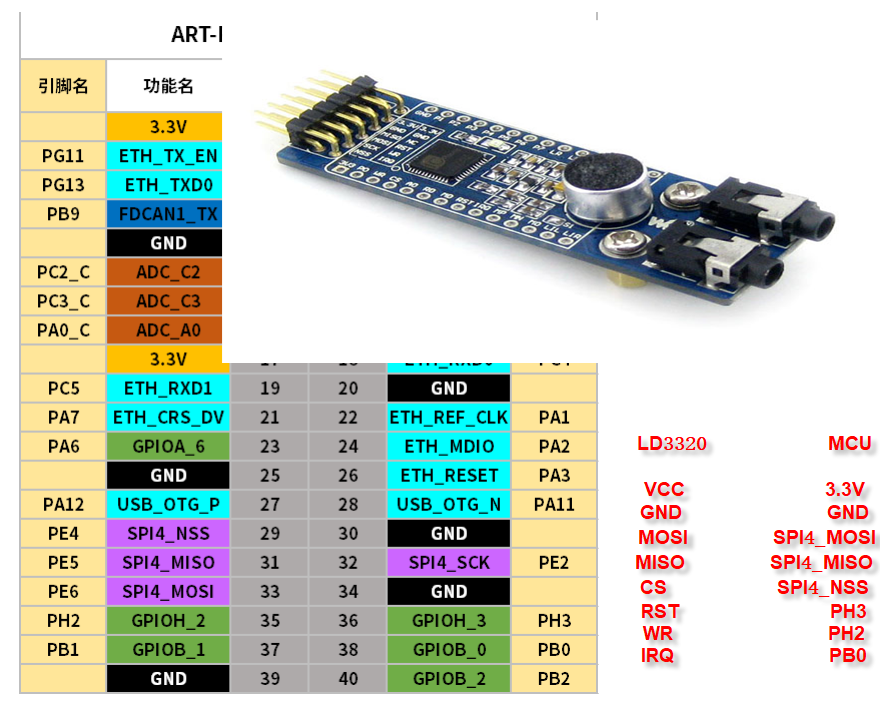
rt studio配置:
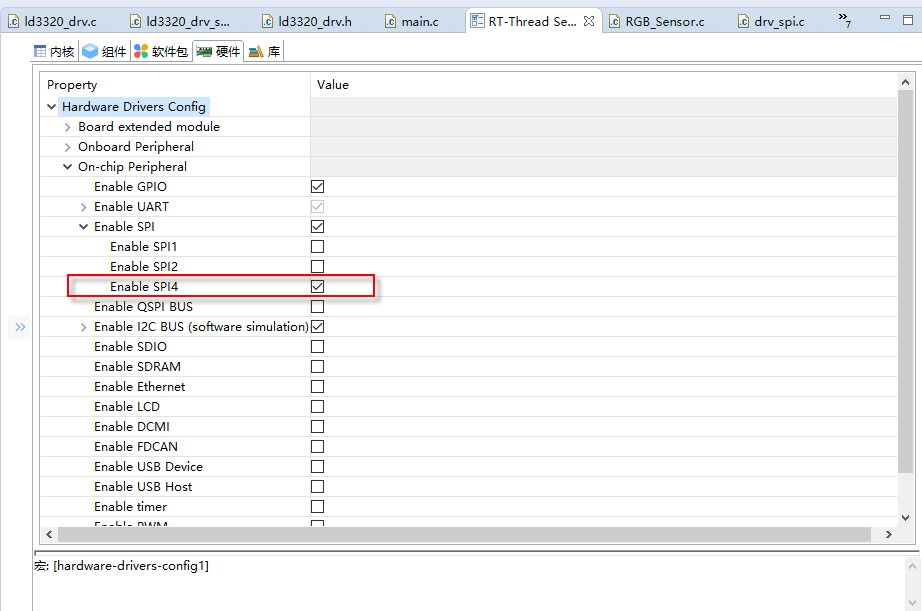
先来对WR、RST、IRQ引脚进行定义
- #define LD3320_WR GET_PIN(H, 2)
- #define LD3320_RST GET_PIN(H, 3)
- #define LD3320_IRQ GET_PIN(B, 0)
- #define LD3320_CS GET_PIN(E, 4)
-
- #define LD3320_WR_Func(x) x ? rt_pin_write(LD3320_WR, PIN_HIGH) : rt_pin_write(LD3320_WR, PIN_LOW)
- #define LD3320_RST_Func(x) x ? rt_pin_write(LD3320_RST, PIN_HIGH) : rt_pin_write(LD3320_RST, PIN_LOW)
- #define LD3320_CS_Func(x) x ? rt_pin_write(LD3320_CS, PIN_HIGH) : rt_pin_write(LD3320_CS, PIN_LOW)
IRQ需要注册中断:
- void rt_ld3320_irq_pin_init()
- {
- rt_pin_mode(LD3320_IRQ, PIN_MODE_INPUT_PULLUP);
-
- rt_pin_attach_irq(LD3320_IRQ, PIN_IRQ_MODE_FALLING, rt_ld3320_isr, RT_NULL);
- rt_pin_irq_enable(LD3320_IRQ, PIN_IRQ_ENABLE);
- }
SPI设备注册初始化:
- void rt_ld3320_init(int argc, char *argv[])
- {
- char name[RT_NAME_MAX];
-
- if (argc == 2)
- {
- rt_strncpy(name, argv[1], RT_NAME_MAX);
- }
- else
- {
- rt_strncpy(name, LD3320_SPI_DEVICE_NAME, RT_NAME_MAX);
- }
- rt_hw_ld3320_init();
-
- spi_dev_ld3320 = (struct rt_spi_device *)rt_device_find(name);
- if (!spi_dev_ld3320)
- {
- rt_kprintf("spi sample run failed! can't find %s device!\n", name);
- }
- else
- {
- rt_kprintf("spi sample run success!find %s device!\n", name);
- }
-
- struct rt_spi_configuration cfg;
- cfg.data_width = 8;
- cfg.mode = RT_SPI_MSB | RT_SPI_MASTER | RT_SPI_MODE_2;
- cfg.max_hz = 6 * 1000 * 100; /* 6M */
-
- if (rt_spi_configure(spi_dev_ld3320, &cfg) == RT_ERROR)
- {
- rt_kprintf("spi4 config error\r\n");
- }
- rt_kprintf("spi4 config success\r\n");
-
- rt_LD_init();
- }
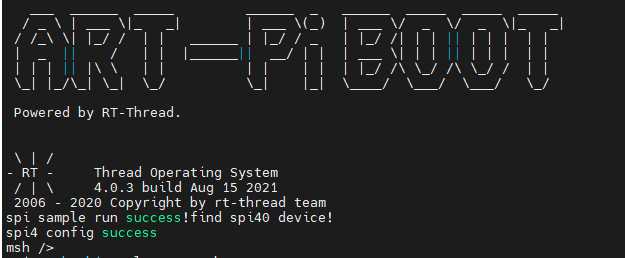
老规矩。不出意外的话,SPI初始化OK的,来看:
接下来编写读写寄存器的基本函数:
写寄存器:结合上面对自定义数据传输函数的介绍,使用自定义数据实现SPI数据传输
- /********************************************************************************
- function:
- Write data to LD3320 reg
- ********************************************************************************/
- static void rt_LD_WriteReg(rt_uint8_t data1, rt_uint8_t data2)
- {
- rt_uint8_t buf[3];
-
- struct rt_spi_message msg;
-
- LD3320_WR_Func(0);
-
- buf[0] = 0x04;
- buf[1] = data1;
- buf[2] = data2;
-
- msg.send_buf = buf;
- msg.recv_buf = RT_NULL;
- msg.length = 3;
- msg.cs_take = 1;
- msg.cs_release = 1;
- msg.next = RT_NULL;
-
- rt_spi_transfer_message(spi_dev_ld3320, &msg);
- }
读取寄存器:
- /********************************************************************************
- function:
- Read data from LD3320 reg
- ********************************************************************************/
- static rt_uint8_t rt_LD_ReadReg(rt_uint8_t reg_addr)
- {
- rt_uint8_t ret_byte;
-
- LD3320_WR_Func(0);
-
- struct rt_spi_message msg1, msg2;
-
- rt_uint8_t buf[3];
-
- buf[0] = 0x05;
- buf[1] = reg_addr;
- buf[2] = 0x00;
-
- msg1.send_buf = buf;
- msg1.recv_buf = RT_NULL;
- msg1.length = 2;
- msg1.cs_take = 1;
- msg1.cs_release = 0;
- msg1.next = &msg2;
-
- msg2.send_buf = RT_NULL;
- msg2.recv_buf = &ret_byte;
- msg2.length = 1;
- msg2.cs_take = 0;
- msg2.cs_release = 1;
- msg2.next = RT_NULL;
-
- rt_spi_transfer_message(spi_dev_ld3320, &msg1);
-
- return (ret_byte);
- }
关于语音播放,录放音的本章先不做介绍,重点看看语音识别如何实现:
模块在开始工作之前,要先对其进行复位操作,就是对芯片的第 47 腿( RSTB*)发送低电平,然后需要对片选 CS 做一次 拉低→拉高的操作,以激活内部 DSP。可按照以下顺序:
- /********************************************************************************
- function:
- LD3320 hardware init
- ********************************************************************************/
- void rt_LD_init(void)
- {
- LD3320_RST_Func(1);
- rt_thread_delay(100);
- LD3320_RST_Func(0);
- rt_thread_delay(100);
- LD3320_RST_Func(1);
-
- rt_thread_delay(100);
- LD3320_CS_Func(0);
- rt_thread_delay(100);
- LD3320_CS_Func(1);
- rt_thread_delay(100);
- }
语音识别的操作顺序是:
语音识别用初始化(包括通用初始化)→写入识别列表→开始识别, 并准备好中断响应函数,打开中断允许位。
这里需要说明一下,如果不用中断方式,也可以通过查询方式工作。在“开 始识别”后,读取寄存器 B2H 的值,如果为 21H 就表示有识别结果产生。
在此之后读取候选项等操作与中断方式相同。
-
通用初始化
- /********************************************************************************
- function:
- Common init
- ********************************************************************************/
- static void rt_LD_Init_Common(void)
- {
- bMp3Play = 0;
-
- rt_LD_ReadReg(0x06);
- rt_LD_WriteReg(0x17, 0x35);
- rt_thread_delay(20);
- rt_LD_ReadReg(0x06);
-
- rt_LD_WriteReg(0x89, 0x03);
- rt_thread_delay(20);
- rt_LD_WriteReg(0xCF, 0x43);
- rt_thread_delay(20);
- rt_LD_WriteReg(0xCB, 0x02);
-
- /*PLL setting*/
- rt_LD_WriteReg(0x11, LD_PLL_11);
- if (nLD_Mode == LD_MODE_MP3)
- {
- rt_LD_WriteReg(0x1E, 0x00);
- rt_LD_WriteReg(0x19, LD_PLL_MP3_19);
- rt_LD_WriteReg(0x1B, LD_PLL_MP3_1B);
- rt_LD_WriteReg(0x1D, LD_PLL_MP3_1D);
- }
- else
- {
- rt_LD_WriteReg(0x1E, 0x00);
- rt_LD_WriteReg(0x19, LD_PLL_ASR_19);
- rt_LD_WriteReg(0x1B, LD_PLL_ASR_1B);
- rt_LD_WriteReg(0x1D, LD_PLL_ASR_1D);
- }
- rt_thread_delay(20);
- rt_LD_WriteReg(0xCD, 0x04);
- rt_LD_WriteReg(0x17, 0x4c);
- rt_thread_delay(20);
- rt_LD_WriteReg(0xB9, 0x00);
- rt_LD_WriteReg(0xCF, 0x4F);
- rt_LD_WriteReg(0x6F, 0xFF);
- }
-
语音识别初始化
- /********************************************************************************
- function:
- ASR init
- ********************************************************************************/
- static void rt_LD_Init_ASR(void)
- {
- nLD_Mode = LD_MODE_ASR_RUN;
- rt_LD_Init_Common();
-
- rt_LD_WriteReg(0xBD, 0x00);
- rt_LD_WriteReg(0x17, 0x48);
- rt_thread_delay(20);
-
- rt_LD_WriteReg(0x3C, 0x80);
- rt_LD_WriteReg(0x3E, 0x07);
- rt_LD_WriteReg(0x38, 0xff);
- rt_LD_WriteReg(0x3A, 0x07);
- rt_thread_delay(20);
-
- rt_LD_WriteReg(0x40, 0);
- rt_LD_WriteReg(0x42, 8);
- rt_LD_WriteReg(0x44, 0);
- rt_LD_WriteReg(0x46, 8);
- rt_thread_delay(20);
- }
-
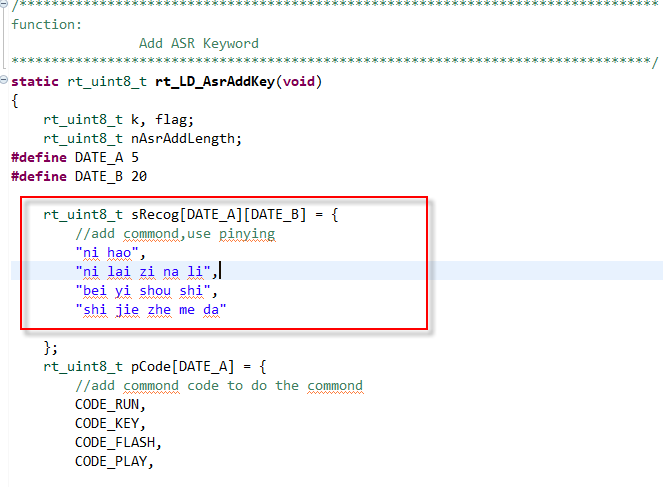
写入识别表
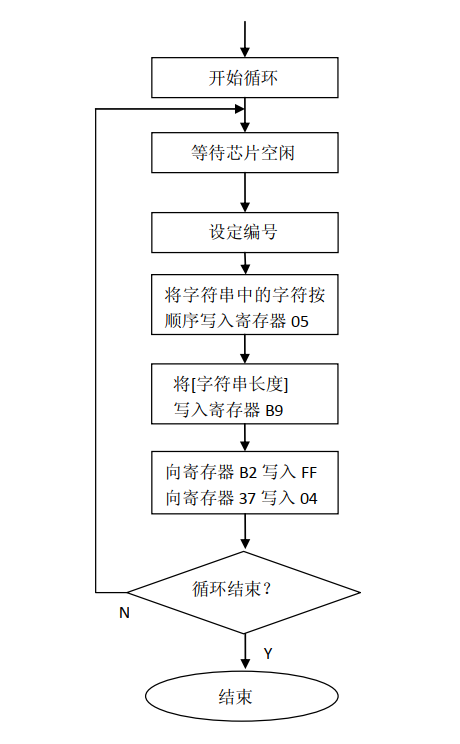
先介绍一个读取 0xB2 寄存器的函数,如果在以后的 ASR 命令函数前不能够 读取到正确 Idle 状态,说明芯片内部可能出错了。经拷机测试,当使用的电 源电压/电流出现不稳定有较大波动时,有小概率会出现这种情况。出现这种 情况时,建议 Reset LD3320 芯片,重新启动设置芯片。
- /********************************************************************************
- function:
- Check ASR state
- ********************************************************************************/
- static rt_uint8_t rt_LD_Check_ASRBusyFlag(void)
- {
- rt_uint8_t j;
- rt_uint8_t flag = 0;
- for (j = 0; j < 10; j++)
- {
- if (rt_LD_ReadReg(0xb2) == 0x21)
- {
- flag = 1;
- //rt_kprintf("success!!! ASR OK\r\n");
- break;
- }
- rt_thread_delay(10);
- //printf("ERROR!!! ASR Busy\r\n");
- }
- return flag;
- }
-
- /********************************************************************************
- function:
- Add ASR Keyword
- ********************************************************************************/
- static rt_uint8_t rt_LD_AsrAddKey(void)
- {
- rt_uint8_t k, flag;
- rt_uint8_t nAsrAddLength;
- #define DATE_A 5
- #define DATE_B 20
-
- rt_uint8_t sRecog[DATE_A][DATE_B] = {
- //add commond,use pinying
- "qian jin",
- "hou tui",
- "zuo zhuan",
- "you zhuan"
-
- };
- rt_uint8_t pCode[DATE_A] = {
- //add commond code to do the commond
- CODE_RUN,
- CODE_KEY,
- CODE_FLASH,
- CODE_PLAY,
-
- };
- flag = 1;
- for (k = 0; k < DATE_A; k++)
- { //write data to LD3320
- if (rt_LD_Check_ASRBusyFlag() == 0)
- {
- flag = 0;
- break;
- }
- rt_LD_WriteReg(0xc1, pCode[k]);
- rt_LD_WriteReg(0xc3, 0);
- rt_LD_WriteReg(0x08, 0x04);
- rt_thread_delay(1);
- rt_LD_WriteReg(0x08, 0x00);
- rt_thread_delay(1);
- for (nAsrAddLength = 0; nAsrAddLength < DATE_B; nAsrAddLength++)
- {
- if (sRecog[k][nAsrAddLength] == 0)
- break;
- rt_LD_WriteReg(0x5, sRecog[k][nAsrAddLength]);
- }
- rt_LD_WriteReg(0xb9, nAsrAddLength);
- rt_LD_WriteReg(0xb2, 0xff);
- rt_LD_WriteReg(0x37, 0x04);
- }
- return flag;
- }
-
-
开始识别
- /********************************************************************************
- function:
- Begin to ASR
- ********************************************************************************/
- static rt_uint8_t rt_LD_AsrRun(void)
- {
- rt_LD_WriteReg(0x35, MIC_VOL);
- rt_LD_WriteReg(0x1C, 0x09);
- rt_LD_WriteReg(0xBD, 0x20);
- rt_LD_WriteReg(0x08, 0x01);
- rt_thread_delay(20);
- rt_LD_WriteReg(0x08, 0x00);
- rt_thread_delay(20);
-
- if (rt_LD_Check_ASRBusyFlag() == 0)
- return 0;
-
- rt_LD_WriteReg(0xB2, 0xff);
- rt_LD_WriteReg(0x37, 0x06);
- rt_LD_WriteReg(0x37, 0x06);
- rt_thread_delay(20);
- rt_LD_WriteReg(0x1C, 0x0b);
- rt_LD_WriteReg(0x29, 0x10);
- rt_LD_WriteReg(0xBD, 0x00);
- return 1;
- }
-
- /********************************************************************************
- function:
- Run ASR
- ********************************************************************************/
- rt_uint8_t rt_LD_ASR(void)
- {
- rt_uint8_t i = 0;
- rt_uint8_t asrflag = 0;
- for (i = 0; i < 5; i++)
- { //run ASR try 5 times
- rt_LD_Init_ASR(); //init ASR
- rt_thread_delay(100);
- if (rt_LD_AsrAddKey() == 0)
- { //Add fixed to LD3320
- rt_kprintf("ERROR!!! LD_AsrAddKey\r\n");
- rt_LD_init(); //ERROR,Reset LD3320
- rt_thread_delay(50);
- continue;
- }
- rt_thread_delay(10);
- if (rt_LD_AsrRun() == 0)
- { //start ASR
- rt_kprintf("ERROR!!! LD_AsrRun\r\n");
- rt_LD_init(); //ERROR,Reset LD3320
- rt_thread_delay(50);
- continue;
- }
- asrflag = 1;
- break;
- }
- //rt_kprintf("RunASR\r\n");
- return asrflag;
- }
-
-
响应中断 如果麦克风采集到声音,不管是否识别出正常结果,都会产生一个 中断信号。而中断程序要根据寄存器的值分析结果。读取 BA 寄存器的值,可以知道有几个候选答案,而 C5 寄存器里的 答案是得分最高、最可能正确的答案。例如发音为“上海”并被成功识别(无其他候选),那么 BA 寄存器 里的数值是 1,而 C5 寄存器里的值是对应的编码 3。
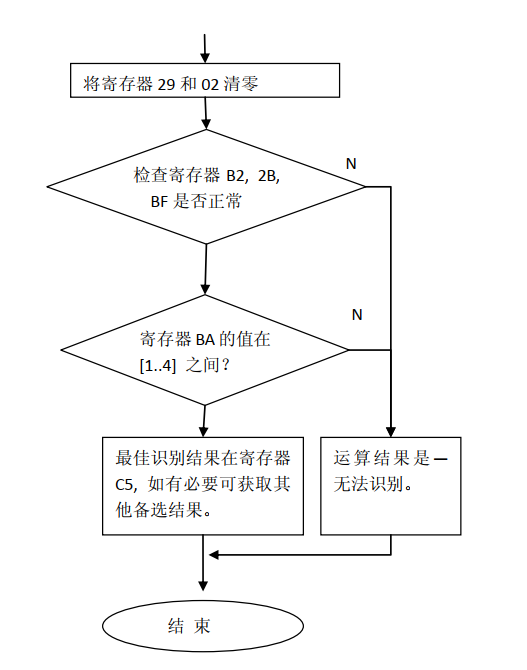
中断到来我们置一标志即可,逻辑处理函数放在main中执行
-
根据识别内容执行对应用户代码
- void rt_ProcessInt()
- {
- rt_uint8_t nAsrResCount = 0;
- ucRegVal = rt_LD_ReadReg(0x2B);
- ucHighInt = rt_LD_ReadReg(0x29); // interrupt enable flag
- ucLowInt = rt_LD_ReadReg(0x02); // interrupt enable flag
- rt_LD_WriteReg(0x29, 0);// interrupt disenable
- rt_LD_WriteReg(0x02, 0);// interrupt disenable
-
- if(nLD_Mode == LD_MODE_ASR_RUN) {
- //rt_kprintf("---------------ASR---------------\r\n");
- //The interruption caused by speech recognition
- //(There is sound input, and there is interruption whether the recognition is successful or failed)
- if((ucRegVal & 0x10) && rt_LD_ReadReg(0xb2)==0x21 && rt_LD_ReadReg(0xbf)==0x35) {
- nAsrResCount = rt_LD_ReadReg(0xba);
- if(nAsrResCount>0 && nAsrResCount<=4) {
- rt_kprintf("ASR SUCCESSFUL \r\n");
- nAsrStatus = LD_ASR_FOUNDOK;
- }
- else {
- rt_kprintf("ASR UNSUCCESSFUL \r\n");
- nAsrStatus = LD_ASR_FOUNDZERO;
- }
- }
- else {
- //rt_kprintf("No ASR \r\n");
- nAsrStatus = LD_ASR_FOUNDZERO;
- }
- rt_LD_WriteReg(0x2b, 0);
- rt_LD_WriteReg(0x1c, 0);
- return;
- }
- rt_kprintf("--------------PLAY MP3--------------\r\n");
- // Play MP3 to produce 3 kinkd of intterupt
- // A. play over
- // B. data send over
- // C. Data will be used up and sent
- if(rt_LD_ReadReg(0xBA) & CAUSE_MP3_SONG_END) {
- // A. play over
- rt_LD_WriteReg(0x2B, 0);
- rt_LD_WriteReg(0xBA, 0);
- rt_LD_WriteReg(0xBC, 0);
- rt_LD_WriteReg(0x08, 1);
- rt_LD_WriteReg(0x08, 0);
- rt_LD_WriteReg(0x33, 0);
- rt_kprintf("play over \r\n");
- bMp3Play = 0; // play status
- return;
- }
- if(nMp3Pos >= nMp3Size) {
- // B. data send over
- rt_LD_WriteReg(0xBC, 0x01);//data voer
- rt_LD_WriteReg(0x29, 0x10);
- return;
- }
- // C. Data will be used up and sent
- rt_LD_ReloadMp3Data();
- rt_LD_WriteReg(0x29, ucHighInt);
- rt_LD_WriteReg(0x02, ucLowInt);
- }
至此,语音识别流程就算完了,来看看如何调用:
创建两个线程,关于如何创建,紧跟小飞哥步伐,小飞哥会在后面的实战中详细介绍
- int ld3320_sample(void)
- {
-
- static rt_thread_t tid1 = RT_NULL,tid2 = RT_NULL;
-
- rt_ld3320_irq_pin_init();
- /* 创建线程 */
- tid1=rt_thread_create(
- "thread1",
- thread1_entry,
- RT_NULL,
- THREAD_STACK_SIZE,
- THREAD_PRIORITY, THREAD_TIMESLICE);
- /* 如果获得线程控制块,启动这个线程 */
- if (tid1 != RT_NULL)
- rt_thread_startup(tid1);
-
- /* 创建线程 */
- tid2=rt_thread_create(
- "thread2",
- thread2_entry,
- RT_NULL,
- THREAD_STACK_SIZE,
- THREAD_PRIORITY, THREAD_TIMESLICE);
- /* 如果获得线程控制块,启动这个线程 */
- if (tid2 != RT_NULL)
- rt_thread_startup(tid2);
-
- return 0;
- }
- /* 导出到 msh 命令列表中 */
- //MSH_CMD_EXPORT(ld3320_sample, ld3320 sample);
- INIT_COMPONENT_EXPORT(ld3320_sample);
任务函数:
- /* 线程入口 */
- static void thread1_entry(void* parameter)
- {
-
- int i;
- while(1)
- {
- /* rt_kprintf("success!!! thread1_entry OK\r\n");
- rt_thread_delay(500);*/
- if(ld3320_flag)
- {
- ld3320_flag=0;
- rt_ProcessInt();
- }
- else {
- ld3320_flag=0;
- i++;
- if(i%500==0){
-
- rt_kprintf("\r\n\rvoice checking,please speak...\r\n");
- i=0;
- }
- rt_thread_delay(1);
- }
- }
- }
-
- /* 线程入口 */
- static void thread2_entry(void* parameter)
- {
- rt_uint8_t nAsrRes = 0;
-
- while (1)
- {
- if (bMp3Play)
- {
- rt_kprintf("*********playing*********\r\n");
- continue;
- }
- switch (nAsrStatus)
- {
- case LD_ASR_RUNING:
- case LD_ASR_ERROR:
- break;
- case LD_ASR_NONE:
- nAsrStatus = LD_ASR_RUNING;
- if (rt_LD_ASR() == 0) //Start the ASR process once
- nAsrStatus = LD_ASR_ERROR;
- break;
- case LD_ASR_FOUNDOK:
- nAsrRes = rt_LD_GetResult(); //once ASR process end, get the result
- switch (nAsrRes)
- { //show the commond
- case CODE_RUN:
- rt_kprintf("voice control system is runing.....\r\n");
- break;
- case CODE_KEY:
- rt_kprintf("voice control system is runing.....\r\n");
- break;
- case CODE_FLASH:
- rt_kprintf("voice control system is runing.....\r\n");
- break;
- case CODE_PLAY:
- rt_kprintf("voice control system is runing.....\r\n");
- break;
- default:
- break;
- }
- nAsrStatus = LD_ASR_NONE;
- break;
- case LD_ASR_FOUNDZERO:
- default:
- nAsrStatus = LD_ASR_NONE;
- break;
- }
- rt_Board_text(nAsrRes); //do the commond
- nAsrRes = 0;
-
- }
- /* rt_kprintf("success!!! thread2_entry OK\r\n");
- rt_thread_delay(500);*/
- }
至此,完成,ending
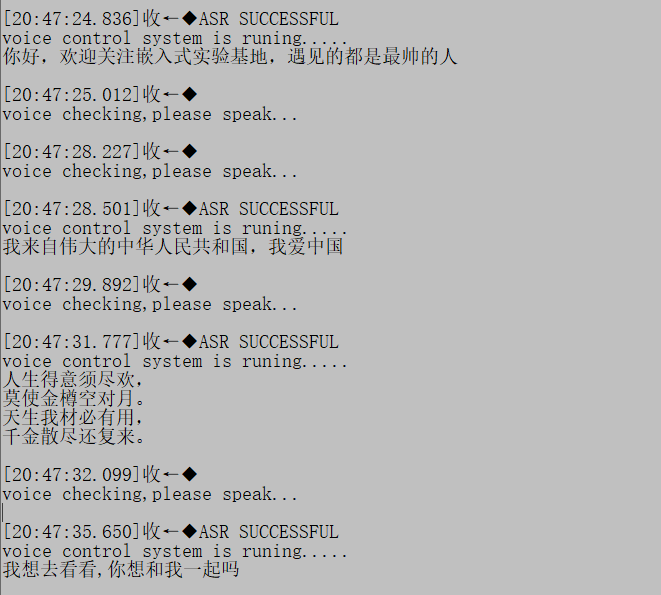
效果演示
既然能够语音识别了,来,咱们一起和它对对话,分别对他说:你好,你来自哪里,背一首诗,世界这么大 识别之后分别对应输出相应的内容:
资料获取
关注公众号,后台回复“LD3320”即可获取源码资料,欢迎添加小飞哥好友,进群交流,欢迎点击阅读原文