
热门标签
热门文章
- 1OpenCV-Python——第18.2章:图像直方图均衡化_opencv flaten
- 2oracle ebs integrated soa gateway,Oracle EBS R12.1 对SOA框架的响应
- 3win7编程接口的一些变化
- 4万界星空科技电子装配行业MES解决方案
- 5机器学习系列(六) -- K-means算法 (食物数据集)_肉类 数据集 机器学习
- 6SSO单点登录,实现对接SAML 协议对接IDP, 实现可拆解的SP服务_saml idp
- 7Unity3D中SendMessage的简单使用_unity sendmessage
- 8蓝图基础(1) —— 变量和变量类型_蓝图变量类型
- 9关于unity工程中无法创建tile(瓦片)_unity tilemap无法绘制
- 10unity 内置图标_animationvisibilitytoggleoff
当前位置: article > 正文
【Kaggle】Save My Paper 基于自编码器的文本图像去噪_用于图像降噪的卷积自编码器
作者:小蓝xlanll | 2024-03-02 14:01:57
赞
踩
用于图像降噪的卷积自编码器
一、题目介绍
本题目来自Kaggle。
光学字符识别(OCR)已经在众多领域得到了应用。但是,一些老旧文件常常面临褶皱,污损,褪色等问题。本题旨在开发某种算法对扫描的含有不同噪声文本图像进行修复。
二、数据分析
数据集的图像含有两种尺寸,分别为
- [540 × 258 × 1]
- [540 × 420 × 1]
所以我们需要在构建数据集时对图像的尺寸进行统一,同时注意,数据集均为单通道8bit图像。
三、模型介绍
自编码器属于自监督学习的范畴,但是在这里我们以干净的图像作为监督来训练自编码器,以使其能够完成降噪的任务。其结构示意图如下所示。
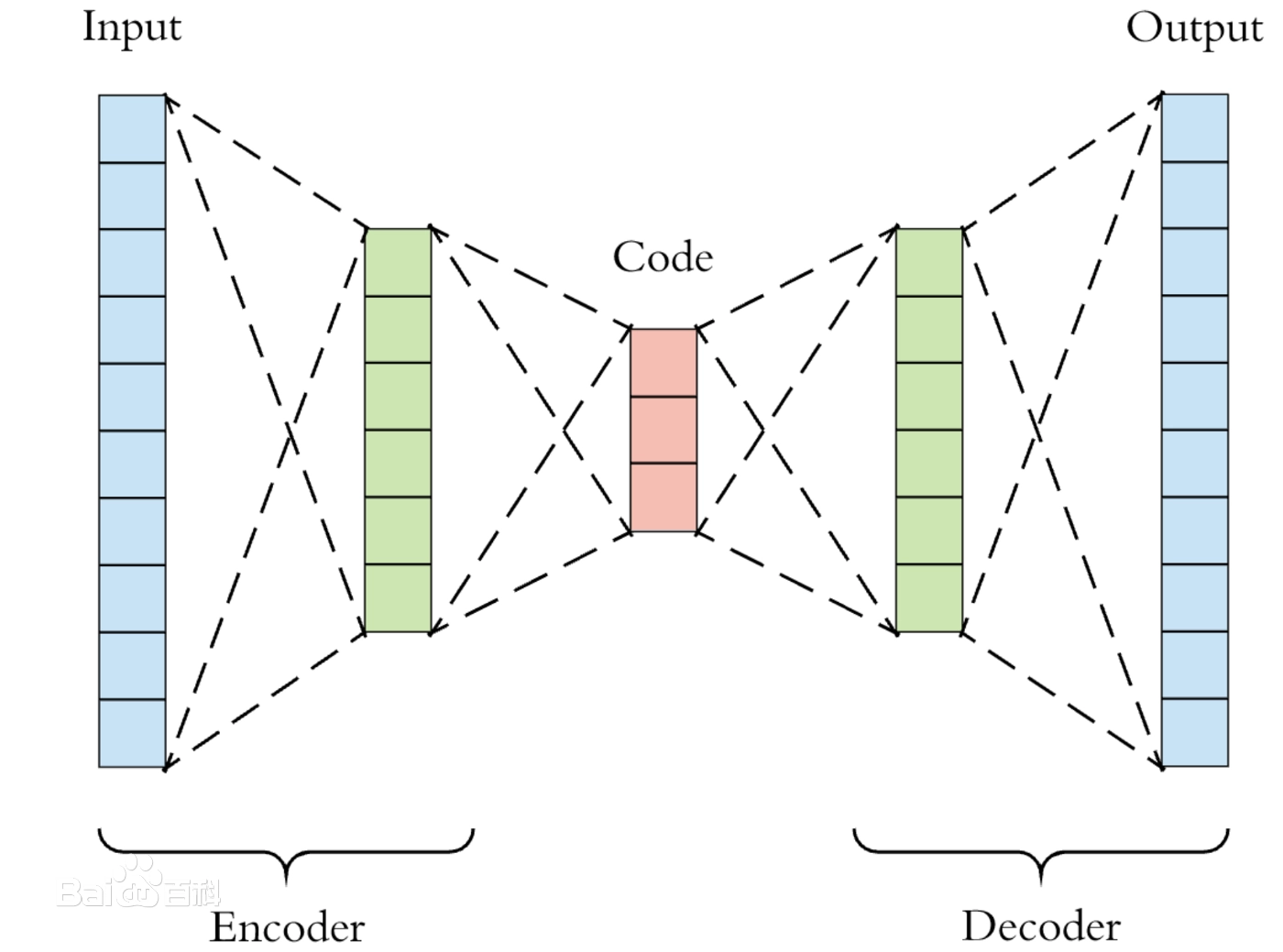
网络分为两个部分,编码器Encoder负责对输入样本进行特征提取(编码),解码器Decoder负责对编码器生成的编码向量解码,将其还原为想要的样本。以噪声图像作为输入,干净图像作为输出。
这里使用的网络结如下所示:
AutoEncoder( (Encoder): Sequential( (0): Conv2d(1, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (1): ReLU() (2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (3): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (4): ReLU() (5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (6): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (7): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (8): ReLU() (9): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (10): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (11): ReLU() (12): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (13): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (14): ReLU() (15): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (16): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) ) (Decoder): Sequential( (0): ConvTranspose2d(256, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (1): ReLU() (2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (3): ConvTranspose2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), output_padding=(1, 1)) (4): ReLU() (5): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (6): ConvTranspose2d(128, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (7): ReLU() (8): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (9): ConvTranspose2d(64, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (10): ReLU() (11): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (12): ConvTranspose2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (13): ConvTranspose2d(32, 16, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), output_padding=(1, 1)) (14): ReLU() (15): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (16): ConvTranspose2d(16, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (17): Sigmoid() ) )

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
加入BatchNorm是为了加速优化,解决梯度消失的问题。
四、PyTorch实现
4.1 数据集构建
import os from PIL import Image from torch.utils.data import Dataset class TrainDataset(Dataset): def __init__(self, sample_list, train_path="./data/train/", clean_path="./data/train_cleaned/", transform=None): self.train_path = train_path self.clean_path = clean_path self.transform = transform self.sample_list = sample_list def __getitem__(self, idx): self.noise_item_path = self.train_path + self.sample_list[idx] self.clean_item_path = self.clean_path + self.sample_list[idx] image_noise = Image.open(self.noise_item_path) image_clean = Image.open(self.clean_item_path) if self.transform: image_clean = self.transform(image_clean) image_noise = self.transform(image_noise) return image_noise, image_clean def __len__(self): return len(self.sample_list) class TestDataset(Dataset): def __init__(self, test_path="D:/PythonProject/Denoising Dirty Documents/data/test/", transform=None): self.test_path = test_path self.test_list = os.listdir(test_path) self.transform = transform def __len__(self): return len(self.test_list) def __getitem__(self, idx): self.test_item_path = self.test_path + self.test_list[idx] image_test = Image.open(self.test_item_path) if self.transform: image_test = self.transform(image_test) return image_test, self.test_list[idx]
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
训练集包括输入的噪声样本和作为监督的干净样本,测试集包括测试样本和测试样本名称(以便生成新样本)
4.2 模型构建
import torch import torch.nn as nn class AutoEncoder(nn.Module): def __init__(self): super(AutoEncoder, self).__init__() # Encoder self.Encoder = nn.Sequential( nn.Conv2d(1, 64, 3, 1, 1), nn.ReLU(), nn.BatchNorm2d(64), nn.Conv2d(64, 64, 3, 1, 1), nn.ReLU(), nn.MaxPool2d(2, 2), nn.BatchNorm2d(64), nn.Conv2d(64, 128, 3, 1, 1), nn.ReLU(), nn.BatchNorm2d(128), nn.Conv2d(128, 128, 3, 1, 1), nn.ReLU(), nn.BatchNorm2d(128), nn.Conv2d(128, 256, 3, 1, 1), nn.ReLU(), nn.MaxPool2d(2, 2), nn.BatchNorm2d(256), ) # Decoder self.Decoder = nn.Sequential( nn.ConvTranspose2d(256, 128, 3, 1, 1), nn.ReLU(), nn.BatchNorm2d(128), nn.ConvTranspose2d(128, 128, 3, 2, 1, 1), nn.ReLU(), nn.BatchNorm2d(128), nn.ConvTranspose2d(128, 64, 3, 1, 1), nn.ReLU(), nn.BatchNorm2d(64), nn.ConvTranspose2d(64, 32, 3, 1, 1), nn.ReLU(), nn.BatchNorm2d(32), nn.ConvTranspose2d(32, 32, 3, 1, 1), nn.ConvTranspose2d(32, 16, 3, 2, 1, 1), nn.ReLU(), nn.BatchNorm2d(16), nn.ConvTranspose2d(16, 1, 3, 1, 1), nn.Sigmoid(), ) def forward(self, x): encoder = self.Encoder(x) decoder = self.Decoder(encoder) return decoder
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
4.3 优化方案和训练过程
import os import torch import torch.optim import numpy as np from torchvision.datasets import MNIST import visdom from torch.utils.data import DataLoader import torchvision.transforms as transforms from torchvision.utils import save_image import argparse from PIL import Image from model import AutoEncoder from dataset import TrainDataset, TestDataset parser = argparse.ArgumentParser(description='PyTorch AutoEncoder Training') parser.add_argument('--epoch', type=int, default=20, help="Epochs to train") parser.add_argument('--seed', type=int, default=2022) parser.add_argument('--batch_size', type=int, default=2) parser.add_argument('--lr', type=float, default=1e-2) parser.add_argument('--momentum', type=float, default=0.9) parser.add_argument('--nesterov', default=True, type=bool, help='nesterov momentum') parser.add_argument('--weight_decay', default=1e-5, type=float) parser.add_argument('--checkpoint', default="Gray_checkpoint.pkl", type=str) parser.add_argument('--mode', type=str, choices=['train', 'test']) parser.add_argument('--version', default="default", type=str) parser.add_argument('--prefetch', type=int, default=0) parser.set_defaults(augment=True) args = parser.parse_args() use_cuda = True torch.manual_seed(args.seed) device = torch.device("cuda" if use_cuda else "cpu") print() print(args) def adjust_learning_rate(optimizer, epochs): lr = args.lr * ((0.5 ** int(epochs >= 20)) * (0.1 ** int(epochs >= 40)) * (0.1 ** int(epochs >= 60))) for param_group in optimizer.param_groups: param_group['lr'] = lr def train_test_split(data, random_seed=55, split=0.8): np.random.shuffle(data) train_size = int(len(data) * split) return data, data[train_size:] def to_img(x): x = (x + 1.) * 0.5 x = x.clamp(0, 1) return x def aug(img, thr): img = np.array(img) print(img) h, w = img.shape for i in range(h): for j in range(w): if img[i, j] < thr * 255: img[i, j] = 0 return Image.fromarray(img) def build_dataset(): sample_list = os.listdir("D:/PythonProject/Denoising Dirty Documents/data/train/") train_list, val_list = train_test_split(sample_list) normalize = transforms.Normalize(mean=[0.5], std=[0.5]) transform = transforms.Compose([ transforms.Resize([400, 400]), transforms.ToTensor(), normalize, ]) test_transform = transforms.Compose([ transforms.ToTensor(), normalize ]) train_set = TrainDataset(sample_list=train_list, train_path="D:/PythonProject/Denoising Dirty Documents/data/train/", clean_path="D:/PythonProject/Denoising Dirty Documents/data/train_cleaned/", transform=transform) val_set = TrainDataset(sample_list=val_list, train_path="D:/PythonProject/Denoising Dirty Documents/data/train/", clean_path="D:/PythonProject/Denoising Dirty Documents/data/train_cleaned/", transform=transform) test_set = TestDataset(test_path="D:/PythonProject/Denoising Dirty Documents/data/test/", transform=test_transform) train_loader = DataLoader(dataset=train_set, batch_size=args.batch_size, num_workers=args.prefetch, shuffle=True, pin_memory=True) val_loader = DataLoader(dataset=val_set, batch_size=args.batch_size, num_workers=args.prefetch, shuffle=False, pin_memory=True) test_loader = DataLoader(dataset=test_set, batch_size=1, num_workers=args.prefetch, shuffle=False, pin_memory=True) return train_loader, val_loader, test_loader def build_model(): model = AutoEncoder().to(device) return model def validation(model, val_loader, criterion): model.eval() val_loss = 0 with torch.no_grad(): for batch_idx, (inputs, targets) in enumerate(val_loader): inputs, targets = inputs.to(device), targets.to(device) y = model(inputs) loss = criterion(y, targets) val_loss = val_loss + loss.item() val_loss /= len(val_loader.dataset) print('\nTest set: Average loss: {:.4f}\n'.format(val_loss)) return val_loss def train(model, train_loader, optimizer, criterion, epoch): model.train() print("Epoch: %d" % (epoch + 1)) running_loss = 0 for batch_idx, (image_noise, image_clean) in enumerate(train_loader): image_noise, image_clean = image_noise.to(device), image_clean.to(device) image_gen = model(image_noise) optimizer.zero_grad() loss = criterion(image_gen, image_clean) loss.backward() optimizer.step() running_loss = running_loss + loss.item() if (batch_idx + 1) % 10 == 0: print('Epoch: [%d/%d]\t' 'Iters: [%d/%d]\t' 'Loss: %.4f\t' % ( epoch, args.epoch, batch_idx + 1, len(train_loader.dataset) / args.batch_size, (running_loss / (batch_idx + 1)))) if (epoch + 1) % 1 == 0: y = to_img(image_gen).cpu().data save_image(y, './temp/image_{}.png'.format(epoch + 1)) return running_loss / (len(train_loader.dataset) / args.batch_size + 1) def clean_noise(model, test_loader): model.load_state_dict(torch.load(args.checkpoint), strict=True) for batch_idx, (inputs, name) in enumerate(test_loader): inputs = inputs.to(device) y = to_img(model(inputs).cpu().data)[0] trans = transforms.Compose([ transforms.ToPILImage(), transforms.Lambda(lambda img: aug(img, 0.7)), transforms.ToTensor() ]) y = trans(y) save_image(y, './outputs/{}'.format(name[0])) train_loader, val_loader, test_loader = build_dataset() model = build_model() if __name__ == '__main__': if args.mode == 'train': criterion = torch.nn.MSELoss() optimizer_model = torch.optim.Adam(model.parameters(), lr=args.lr, weight_decay=1e-5) for epoch in range(0, args.epoch + 1): adjust_learning_rate(optimizer_model, epochs=epoch) train(model=model, train_loader=train_loader, optimizer=optimizer_model, criterion=criterion, epoch=epoch) validation(model=model, val_loader=val_loader, criterion=criterion) torch.save(model.state_dict(), args.version + "_checkpoint.pkl") if args.mode == 'test': clean_noise(model=model, test_loader=test_loader)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
在测试集上测试的时候,采用了简单的图像增强处理,以使得文字看起来更加清晰。
五、测试结果与分析
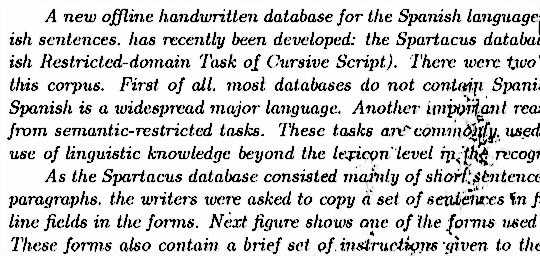
样本一

样本二:
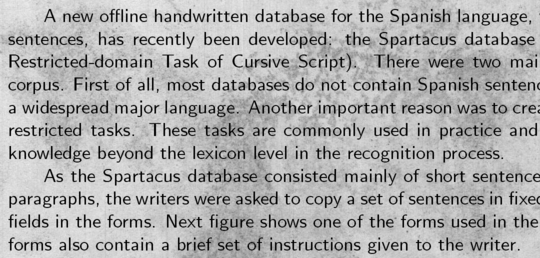
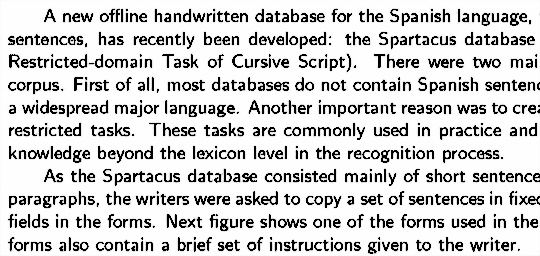
分析:在一定程度上可以减轻噪声的影响,性能不足之处可能由于数据集过小和训练不充分造成。此外,对于540 * 258尺寸的图像,生成图像的大小变为540 * 256,这可能由于卷积和反卷积操作造成了图像尺寸的变换,可以在网络结构上进一步改进。
本文内容由网友自发贡献,转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/180818
推荐阅读
相关标签

