
- 1软件推荐 篇三十七:开源免费无广告的在线音乐免费播放 | MusicFree纯净无广告体验-小众冷门推荐
- 2android 上安装 mysql 数据库 rk3188测试平台_安卓下 mysql
- 3文献学习-6-微创手术中视频检索的无监督特征解缠
- 4华为ensp模拟器使用:VRRP经典实例_华为vrrp配置实例
- 5最全pom.xml详解_pom.xml 最全
- 6pytorch深度学习入门(5)之-Torchaudio音频加载
- 7天工大模型登顶多模态榜单!解决幻觉、跨语言两大难题
- 8新特性解读 | MySQL 8.0 轻松改配置,云上友好_修改mysql plugin 8.0
- 9开源模型应用落地-工具使用篇-Spring AI(七)_org.springframework.ai.chat
- 10如何用vue-cli3脚手架搭建一个基于ts的基础脚手架_vue3+ts 组件库脚手架
大语言模型---强化学习
赞
踩
本文章参考,原文链接:https://blog.csdn.net/qq_35812205/article/details/133563158
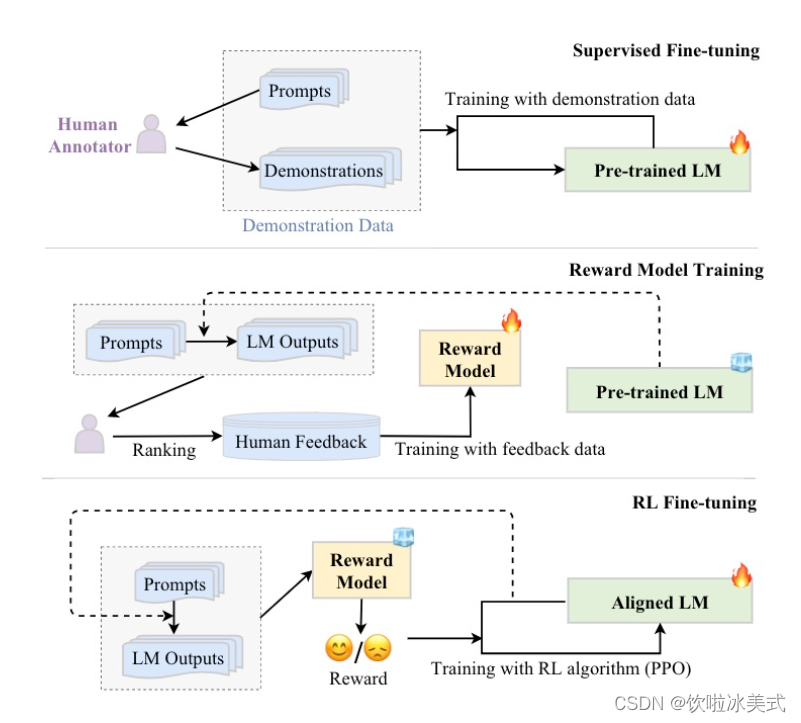
SFT使用交叉熵损失函数,目标是调整参数使模型输出与标准答案一致,不能从整体把控output质量
RLHF(分为奖励模型训练、近端策略优化两个步骤)则是将output作为一个整体考虑,优化目标是使模型生成高质量回复
引发思考:
使用排序数据集和DPO(Direct Preference Learning)直接偏好学习或其他替代方法(如RAILF、ReST等)来训练模型。这可以帮助模型生成更高质量的回复,而不是直接使用RLHF。
为了减少幻觉(如拒绝回答),可以构造排序数据集(如good response为拒绝话术,bad response是没拒绝的胡乱回答)进行RLHF。这种方法可以帮助模型学习在拒绝回答时如何更好地处理情况。
奖励模型训练:奖励模型通常也采用基于 Transformer 架构的预训练语言模型。在奖励模型中,移除最后一个
非嵌入层,并在最终的 Transformer 层上叠加了一个额外的线性层。无论输入的是何种文本,奖励
模型都能为文本序列中的最后一个标记分配一个标量奖励值,样本质量越高,奖励值越大。
在RLHF中(比如MOSS-RLHF)是使用奖励模型来初始化评论家模型(critic model)和奖励模型(reward model),评论家模型也使用奖励模型初始化,便于在早期提供较准确的状态值估计;但是注意PPO会对策略模型、评论家模型训练并更新;奖励模型、参考模型不参与训练。
异策略:固定一个演员和环境交互(不需要更新),将交互得到的轨迹交给另一个负责学习的演员训练。PPO就是策略梯度的异策略版本。通过重要性采样(这里使用KL散度)进行策略梯度的更新。PPO解决了传统策略梯度方法的缺点:高方差、低数据效率、易发散等问题。
PPO-clip算法通过引入裁剪机制来限制策略更新的幅度,使得策略更新更加稳定
强化学习基础知识
1、强化学习框架的六要素
强化学习(RL)是研究agent智能体和环境交互的问题,目标是使agent在复杂而不确定的环境中最大化奖励值。
智能体(Agent):强化学习的主体也就是作出决定的“大脑”;
环境(Environment):智能体所在的环境,智能体交互的对象;
行动(Action):由智能体做出的行动;
奖励(Reward):智能体作出行动后,该行动带来的奖励;
状态(State):智能体自身当前所处的状态;
目标(Objective):指智能体希望达成的目标。
串起6要素:一个在不断变化的【环境】中的【智能体】,为了达成某个【目标】,需要不断【行动】,行动给予反馈即【奖励】,智能体对这些奖励进行学习,改变自己所处的【状态】,再进行下一步行动,即持续这个【行动-奖励-更新状态】的过程,直到达到目标。
策略与价值:
- agent在尝试各种行为时,就是在学习一个策略policy(一套指导agent在特定状态下行动的规则)
- agent会估计价值value,即预测未来采取某个行为后所能带来的奖励
任何一个有智力的个体,它的学习过程都遵循强化学习所描述的原理。比如说,婴儿学走路就是通过与环境交互,不断从失败中学习,来改进自己的下一步的动作才最终成功的。再比如说,在机器人领域,一个智能机器人控制机械臂来完成一个指定的任务,或者协调全身的动作来学习跑步,本质上都符合强化学习的过程。
奖励模型(Reward Model)和评论模型(Critic Model)
奖励模型(Reward Model):奖励模型是强化学习中一个基本元素,它定义了智能体执行特定动作后将得到的奖励。换句话说,奖励模型为智能体在其环境中执行的每个动作提供奖励(正面)或惩罚(负面)。这个模型帮助智能体理解哪些动作是有利的,哪些不是,因此,智能体尝试通过最大化获得的总奖励来找到最优策略。
评论模型(Critic Model):评论模型是一种基于值迭代的方法,它在每个状态或动作上评估(或者"评论")期望的未来奖励。评论者用来估计一个动作或状态的长期价值,通常在演员-评论者模型(Actor-Critic Models)中使用,演员选择动作,评论者评估动作。
两者的主要区别在于,奖励模型直接反映了每个动作的即时反馈,而评论模型是对未来奖励的一个预测或估计,关注的是长期价值,通常基于数学期望来进行评估。
RLHF对齐
1. 训练奖励模型和RL
用奖励模型训练SFT模型,生成模型使用奖励或惩罚来更新策略,以便生成更高质量、符合人类偏好的文本。
| 奖励模型 | RL强化学习 | |
| 作用 | (1)学习人类兴趣偏好,训练奖励模型。由于需要学习到偏好答案,训练语料中含有response_rejected不符合问题的答案。 (2)奖励模型能够在RL强化学习阶段对多个答案进行打分排序。 | 根据奖励模型,训练之前的sft微调模型,RL强化学习阶段可以复用sft的数据集 |
| 训练语料 | {‘question’: ‘土源性线虫感染的多发地区是哪里?’, ‘response_chosen’: ‘苏北地区;贵州省剑河县;西南贫困地区;桂东;江西省鄱阳湖区;江西省’, ‘response_rejected’: ‘在热带和亚热带地区的农村。’}, | 根据奖励模型,训练之前的sft微调模型,RL强化学习阶段可以复用sft的数据集 |
RLHF(reinforcement learning from human feedback)
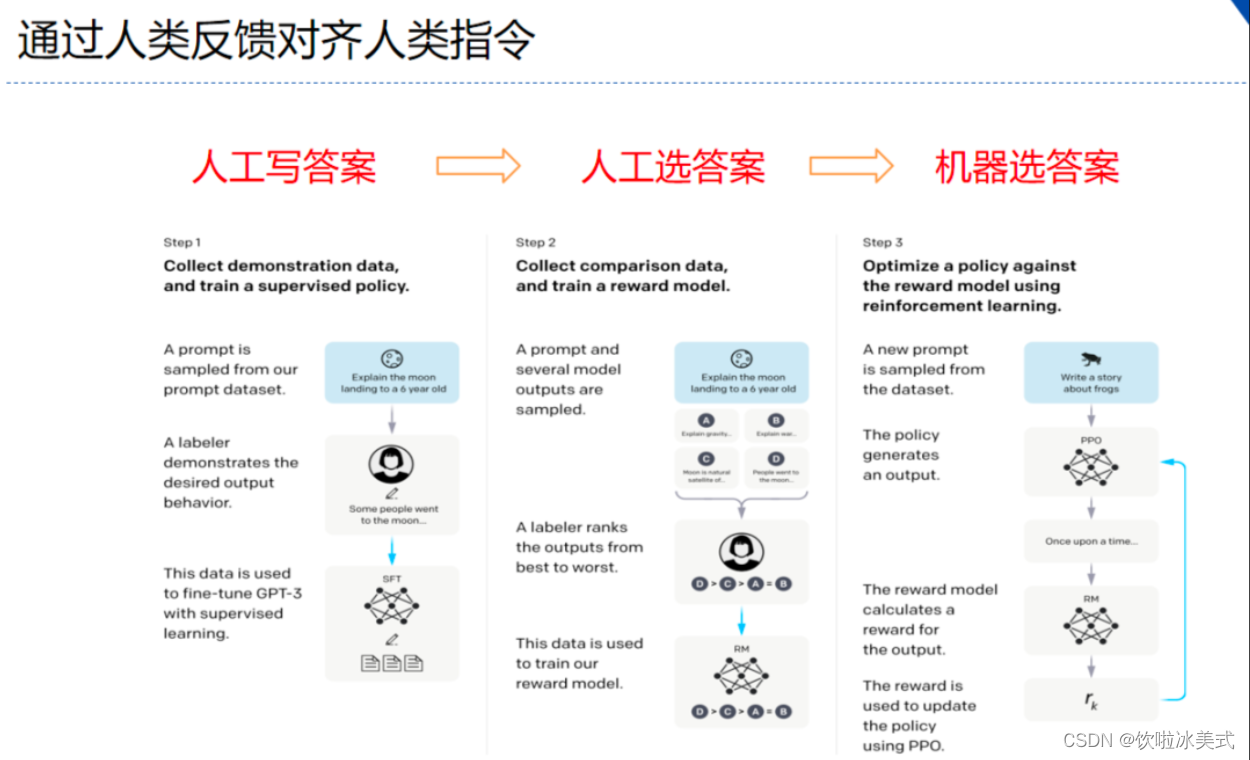
分为三个步骤:
- step1 我做你看:有监督学习,从训练集中挑出一批prompt,人工对prompt写答案。其实就是构造sft数据集进行微调。
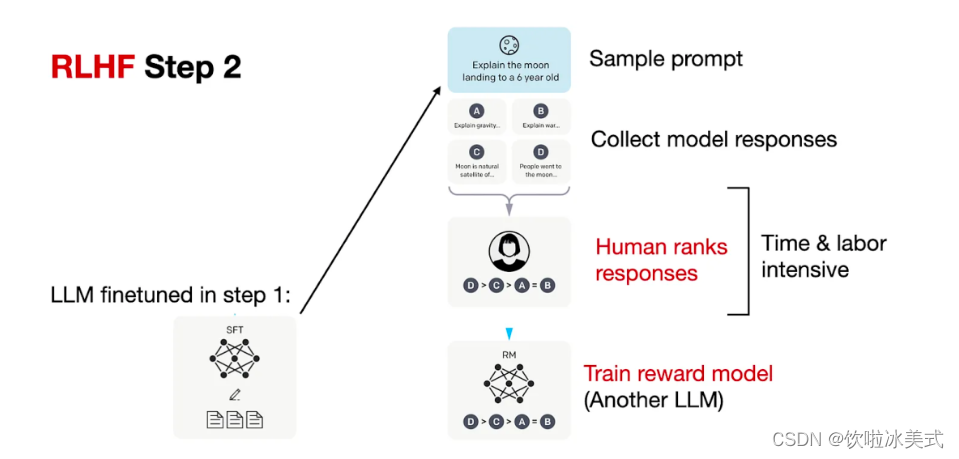
- step2 你做我看:奖励模型训练,这次不人工写答案了,而是让GPT或其他大模型给出几个候选答案,人工对其质量排序,Reward model学习一个打分器;这个让机器学习人类偏好的过程就是【对齐】,但可能会导致胡说八道,可以通过KL Divergence等方法解决。
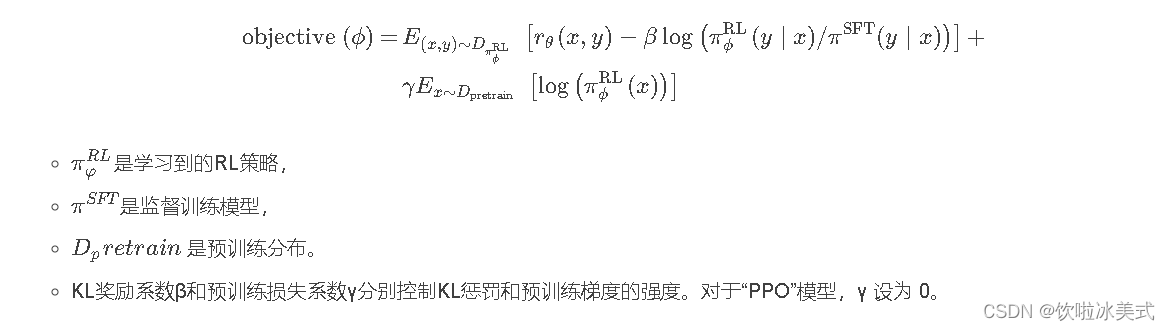
- step3 自学成才:PPO训练,利用第二阶段的奖励模型RM计算奖励分数,同时使用PPO(近端策略优化)更新第一步训练得到的sft模型,最大优化该目标函数:
常见的公开偏好数据集
源自《Llama 2: Open Foundation and Fine-Tuned Chat Models》Table 6:
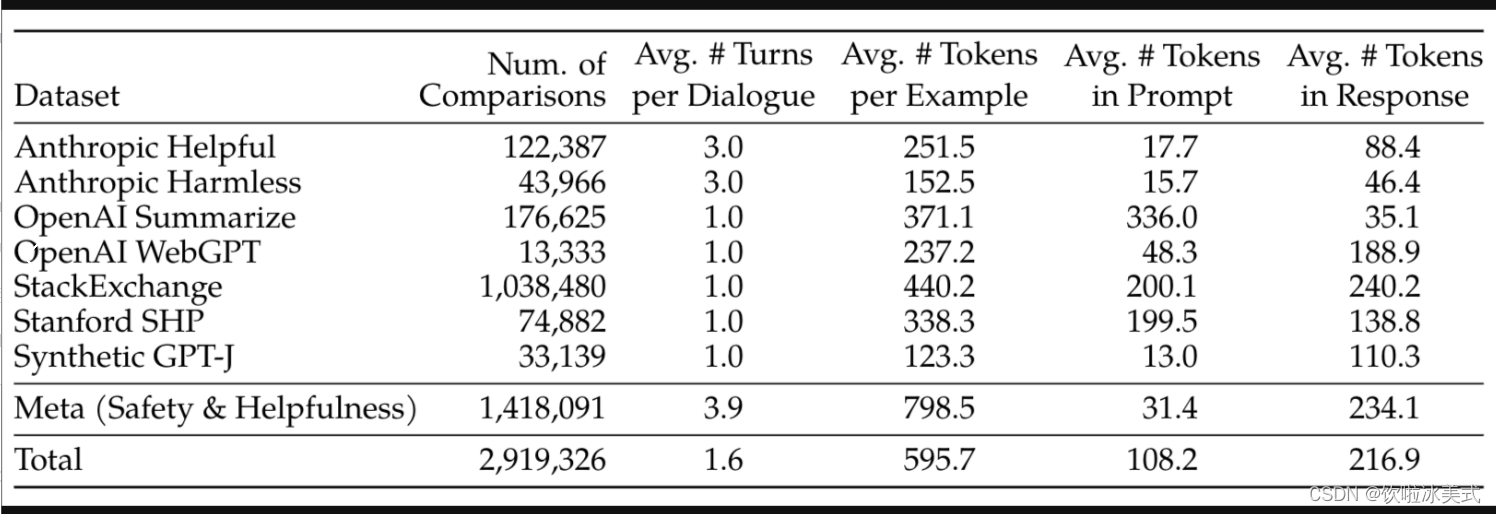
如:https://huggingface.co/datasets/lvwerra/stack-exchange-paired
PPO近端策略优化
PPO思想:保证策略改进同时,通过一些约束来控制策略更新的幅度;在每次迭代中,通过采样多个轨迹数据来更新策略:
- 使用当前策略对环境交互,收集多个轨迹数据
- 利用第一步的轨迹数据计算当前策略和旧策略之间的KL散度,通过控制KL散度大小来限制策略更新的幅度
- 使用优化器对策略进行更新,使其更加接近当前的样本策略
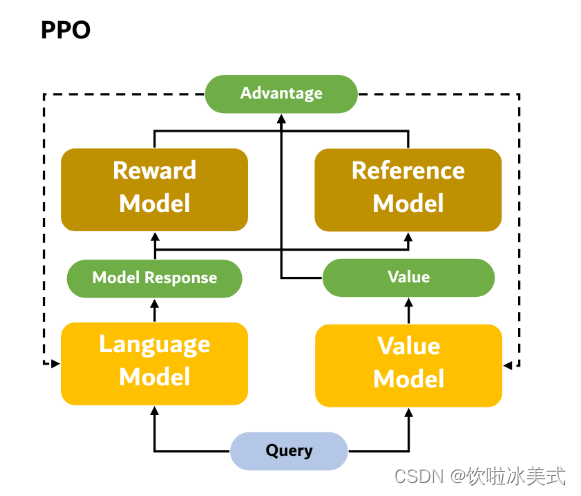
近端策略优化PPO涉及到四个模型:
(1)策略模型(Policy Model),生成模型回复。
(2)奖励模型(Reward Model),输出奖励分数来评估回复质量的好坏。
(3)评论模型(Critic Model/value model),来预测回复的好坏,可以在训练过程中实时调整模型,选择对未来累积收益最大的行为。
(4)参考模型(Reference Model)提供了一个 SFT 模型的备份,帮助模型不会出现过于极端的变化。
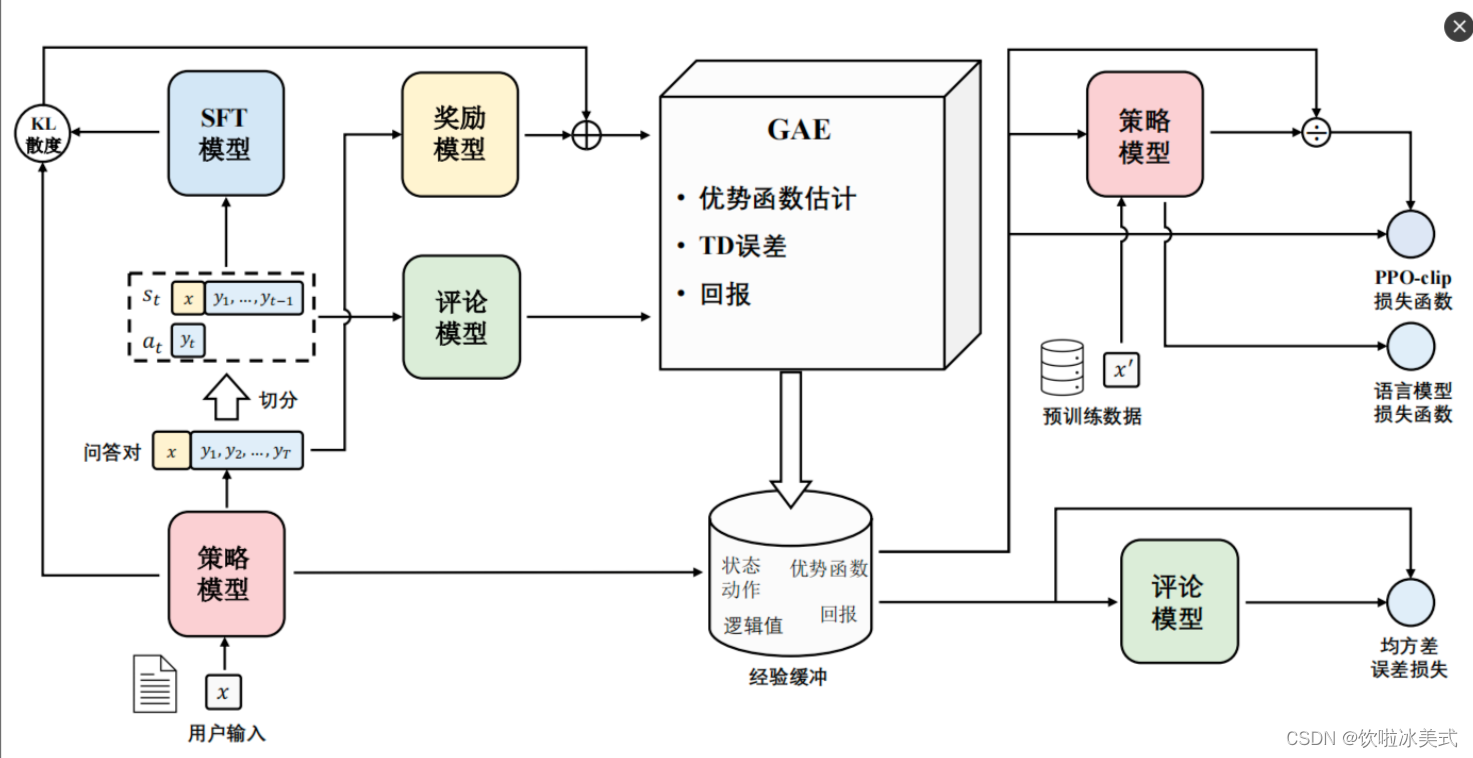
近端策略优化PPO的实施流程如下:
环境采样:策略模型基于给定输入生成一系列的回复,奖励模型则对这些回复进行打分获得奖励。
优势估计:利用评论模型预测生成回复的未来累积奖励,并借助广义优势估计(Generalized Advantage Estimation,GAE)算法来估计优势函数,能够有助于更准确地评估每次行动的好处。
GAE:基于优势函数加权估计的GAE可以减少策略梯度估计方差
优化调整:使用优势函数来优化和调整策略模型,同时利用参考模型确保更新的策略不会有太大的变化,从而维持模型的稳定性。
相关强化学习概念对应:
- Policy:现有LLM接受输入,进行输出的过程。
- State:当前生成的文本序列。
- Action Space:即vocab,也就是从vocab中选取一个作为本次生成的token。
KL散度(Kullback-Leibler Divergence),可以衡量两个概率分布之间的差异程度。在 PPO 算法中,KL 散度(Kullback-Leibler Divergence)的计算公式如下:

其中,π_old 表示旧的策略,π_new 表示当前的样本策略。KL 散度的含义是用 π_old 的分布对 π_new 的分布进行加权,然后计算两个分布之间的差异程度。
具体来说,KL 散度的计算方法是首先计算 π_old(i) / π_new(i) 的比值,然后对其取对数并乘以 π_old(i) 来进行加权。最后将所有加权后的结果相加,即可得到 KL 散度的值。这里的KL散度值是一个【惩罚项】,即经过RL训练后模型和SFT后模型的KL散度(繁殖两个模型偏差太多,导致模型效果下降,RLHF的主要目的是alignment)。
注意:KL 散度是一个非对称的度量,即 KL(π_old || π_new) 与 KL(π_new || π_old) 的值可能不相等。在 PPO 算法中,我们通常使用 KL(π_old || π_new) 来控制策略更新的幅度,因为 KL(π_old || π_new) 的值通常比 KL(π_new || π_old) 更容易控制,并且更能够反映出策略改变的方向。
DPO、PPO 和 BPO 都是用于训练强化学习代理的算法,但它们在算法原理和实现上有一些不同之处。
-
DPO(Direct Policy Optimization):DPO 是一种直接策略优化方法,它通过直接优化策略函数来提高代理的性能。与值函数(价值函数)相比,DPO 不需要估计状态值或状态动作值,而是直接优化策略函数来最大化长期累积奖励。DPO 可能包括各种方法,如 REINFORCE 算法、TRPO(Trust Region Policy Optimization)等。
-
PPO(Proximal Policy Optimization):PPO 也是一种策略优化方法,它专注于近端策略优化。PPO 通过限制每次策略更新的大小来确保稳定性和收敛性,这通常通过一种叫做“近端策略裁剪”的方法来实现。PPO 在训练过程中不需要使用价值函数,而是直接优化策略函数。PPO 的设计目标是简化和提高算法的稳定性。
-
BPO(Batch Policy Optimization):BPO 是一种批量策略优化方法,它使用离线收集的数据批次进行策略更新。与在线方法不同,BPO 不需要与环境交互来收集数据,而是使用事先收集的大量数据进行策略更新。BPO 可以更有效地利用离线数据,但也面临着样本效率和数据偏差等挑战。

