
- 1【老九学堂】【C++】小议二维数组_二维数组的形式
- 2二维数组的定义和引用_二维数组的定义与使用
- 3MySQL 中的锁有哪些类型,MySQL 中加锁的原则_mysql 范围更新使用什么锁
- 4Spring Cloud Gateway 彻底解决Exceeded limit on max bytes to buffer : 262144报错问题
- 5使用TensorFlow Serving进行模型的部署和客户端推理_tensorflow server
- 6FPGA以太网入门(三)——UDP测试实验(基于紫光同创)_fpga udp ip核
- 7Extjs Store 的用法详解
- 8[小白系列]sigmoid和tanh激活函数的绘制(分开画,合起来画,总有一款适合你),逐行代码详解_visio 激活函数的小圈怎么画
- 9Django利用Channels+websocket开发聊天室_django websocket channels
- 10Shell三剑客之sed命令详解_shell sed
自然语言处理--基于HMM+维特比算法的词性标注
赞
踩
自然语言处理作业2--基于HMM+维特比算法的词性标注
一、理论描述
词性标注是一种自然语言处理技术,用于识别文本中每个词的词性,例如名词、动词、形容词等;
词性标注也被称为语法标注或词类消疑,是语料库语言学中将语料库内单词的词性按其含义和上下文内容进行标记的文本数据处理技术;
词性标注可以由人工或特定算法完成,使用机器学习方法实现词性标注是自然语言处理的研究内容。常见的词性标注算法包括隐马尔可夫模型、条件随机场等;
词性标注是对文本进行语言学分析的重要工具,可以帮助计算机理解和处理自然语言文本。通过词性标注,计算机可以更准确地理解句子的结构和含义,从而实现诸如信息抽取、文本分类、句法分析等自然语言处理任务。它主要被应用于文本挖掘和NLP领域,是各类基于文本的机器学习任务(如语义分析、指代消解)的预处理步骤,是自然语言处理中一项非常重要的基础性工作。
二、算法描述
本文实现HMM+维特比算法,具体算法描述如下:
维特比算法是一种动态规划算法,通过计算每个观测节点的不同隐状态的最大概率,并记录路径,最终返回最大概率的路径
函数的输入参数包括观测序列的长度(observation_len)、隐含序列的长度(hidden_len)、初始概率(init_p)、转移概率矩阵(trans_p)和发射概率矩阵(emit_p)
函数首先创建两个二维数组max_probabilities和paths,用于存储每个观测节点的不同隐状态的最大概率和路径
然后,函数通过遍历第一个观测节点的每个隐状态,计算其最大概率,并记录路径。接着,函数遍历后续的每个观测节点,根据维特比算法的公式计算累计概率,得到每个隐状态的最大概率,并更新路径
最后,函数返回最大概率的路径
三、详细描述
以“Bear is move”为例,使用HMM+维特比算法进行词性标注的详细描述如下:
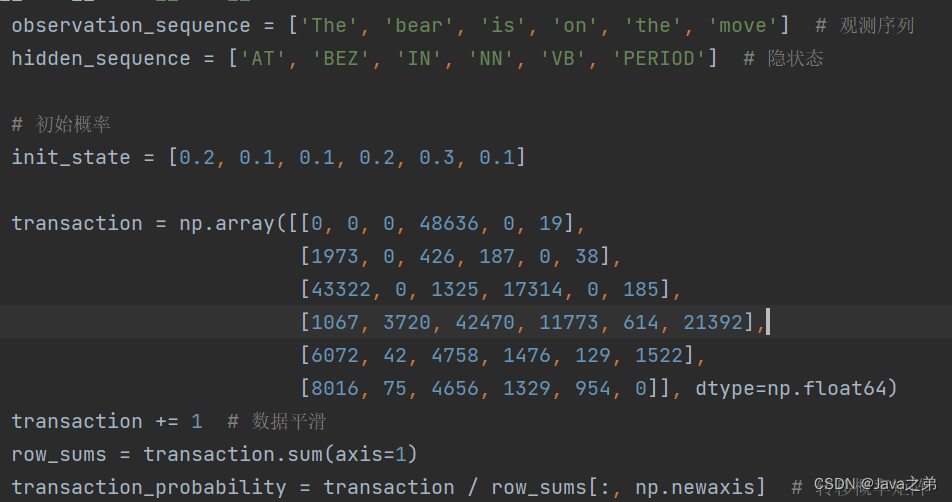
观测序列:['Bear', 'is', 'move']
隐序列:['AT', 'BEZ', 'IN', 'NN', 'VB', 'PERIOD']
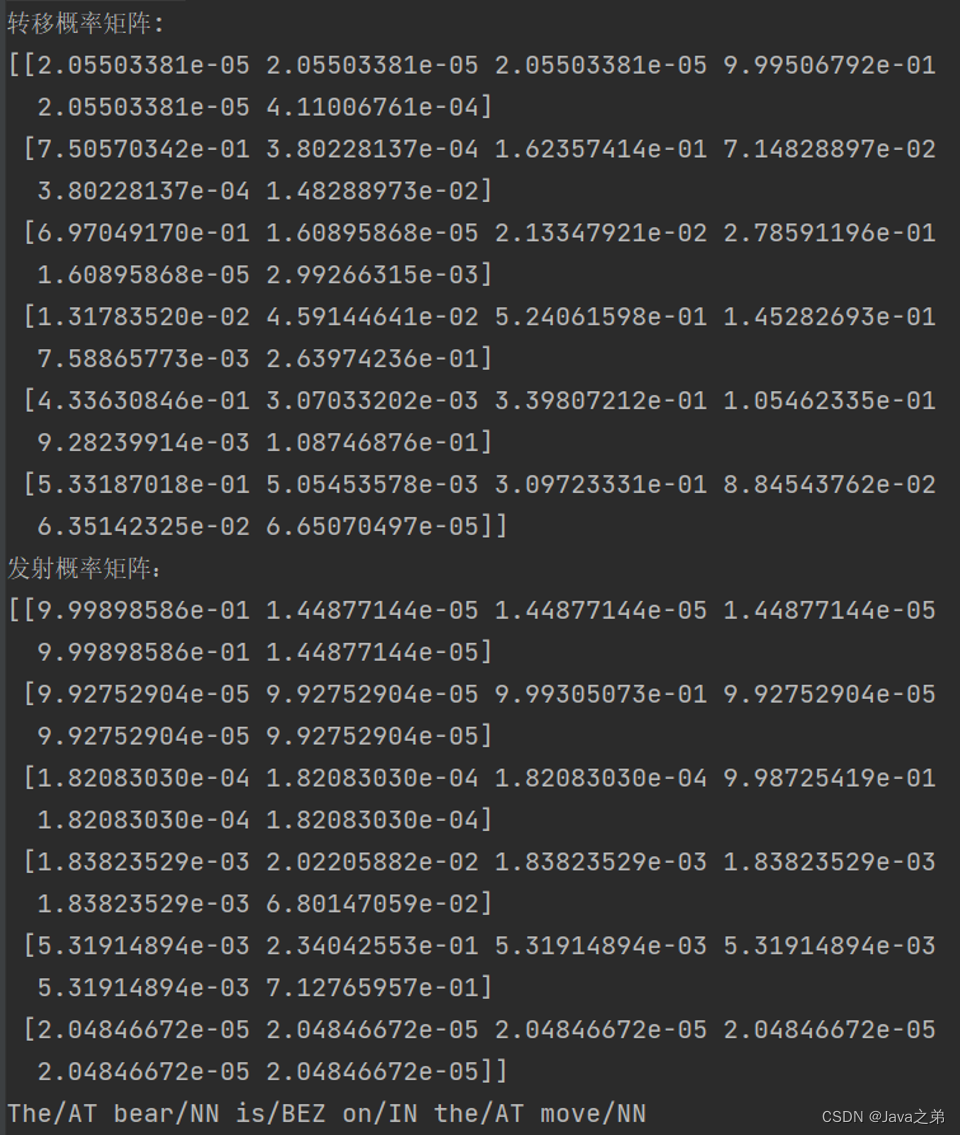
输出:Bear/VB is/BEZ move/NN
初始概率:
| AT | BEZ | IN | NN | VB | PERIOD |
| 0.2 | 0.1 | 0.1 | 0.3 | 0.2 | 0.1 |
转移概率矩阵(已经进行数据平滑): 由当前词性转移到下一个词性的概率
| AT | BEZ | IN | NN | VB | PERIOD | |
| AT | 2.05503381e-05 | 2.05503381e-05 | 2.05503381e-05 | 9.99506792e-01 | 2.05503381e-05 | 4.11006761e-04 |
| BEZ | 7.50570342e-01 | 3.80228137e-04 | 1.62357414e-01 | 7.14828897e-02 | 3.80228137e-04 | 1.48288973e-02 |
| IN | 6.97049170e-01 | 1.60895868e-05 | 2.13347921e-02 | 2.78591196e-01 | 1.60895868e-05 | 2.99266315e-03 |
| NN | 1.31783520e-02 | 4.59144641e-02 | 5.24061598e-01 | 1.45282693e-01 | 7.58865773e-03 | 2.63974236e-01 |
| VB | 4.33630846e-01 | 3.07033202e-03 | 3.39807212e-01 | 1.05462335e-01 | 9.28239914e-03 | 1.08746876e-01 |
| PERIOD | 5.33187018e-01 | 5.05453578e-03 | 3.09723331e-01 | 8.84543762e-02 | 6.35142325e-02 | 6.65070497e-05 |
发射概率矩阵(已进行数据平滑):由隐序列到观测序列的概率
| Bear | is | move | |
| AT | 1.44877144e-05 | 1.44877144e-05 | 1.44877144e-05 |
| BEZ | 9.92752904e-05 | 9.99305073e-01 | 9.92752904e-05 |
| IN | 1.82083030e-04 | 1.82083030e-04 | 1.82083030e-04 |
| NN | 2.02205882e-02 | 1.83823529e-03 | 6.80147059e-02 |
| VB | 2.34042553e-01 | 5.31914894e-03 | 7.12765957e-01 |
| PERIOD | 2.04846672e-05 | 2.04846672e-05 | 2.04846672e-05 |
最大概率矩阵:
V0(j)=init(j)×bj(o0) (init为初始概率,b发射概率矩阵)
Vt(j)=max(Vt−1(i)×aij)×bj(ot) (a为转移概率矩阵,b为发射概率矩阵)
使用paths更新并保存j(观测状态)条路径取到最大概率时的i(隐状态),用于回溯
根据最大概率矩阵 max_probabilities,找到最后一个观测状态 "move" 对应的最大概率的隐状态,作为最终的词性标注结果
四、软件演示
五、问题和总结
- 模型参数的选择会影响标注结果的准确性
- 数据集较小,模型训练效果可能不够理想

