
热门标签
热门文章
- 1【AI大模型应用开发】【RAG优化 / 前沿】0. 综述:盘点当前传统RAG流程中存在的问题及优化方法、研究前沿_rag中文档加载loader的优化
- 2新农人新思路 智能可视化管理系统赋能新型农业发
- 3怎么分析某个明星或者公众人物ins的数据?_分析其他人ins账号点赞数
- 4Hugging Face之ckip实体识别标注体系整理_ckip的ner
- 5AI识别技术详解 --在windows环境中部署基于YOLO v8模型的目标检测
- 6线性代数在AI中的应用
- 7用4种回归方法绘制预测结果图表:向量回归、随机森林回归、线性回归、K-最近邻回归_回归预测的结果示意图
- 8tab切换之图片切换_26.uuu
- 9Scikit-Learn 1.4使用指南:模型选择和评估 排序特征重要性_sklearn 特征重要性
- 10【全面了解自然语言处理三大特征提取器】RNN(LSTM)、transformer(注意力机制)、CNN_cnn,rnn,lstm,transformer之间的优缺点
当前位置: article > 正文
KUKA机器人的旋转角ABC与ABB机器人四元数的区别_abb机器人wpr和kuka机器人abc怎么对应
作者:小蓝xlanll | 2024-04-06 00:09:28
赞
踩
abb机器人wpr和kuka机器人abc怎么对应
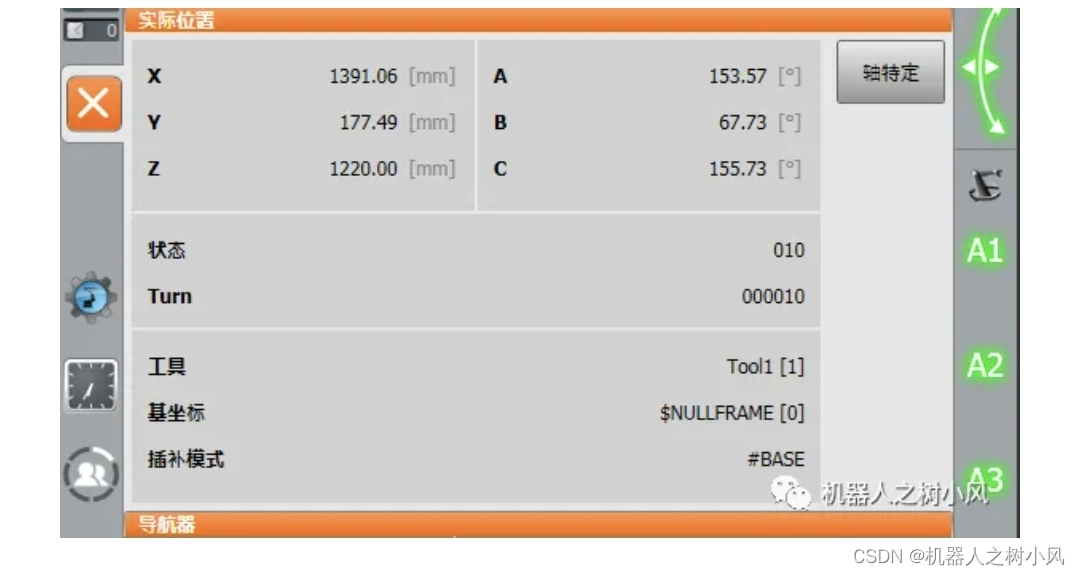
一、KUKA机器人中的旋转角ABC是采用欧拉角来表示的,用来描述机器人的空间姿态。其中A、B、C分别代表绕Z轴、Y轴和X轴的旋转角度,这种旋转是相对于机器人法兰原点进行的。欧拉角描述的旋转顺序是很重要的,因为不同的旋转顺序会得出不同的结果。此外,在KUKA机器人编程中还有“S”和“T”两个重要参数,这两个参数可以反应机器人的静态姿态和运动过程中的姿态,在机器人的移动过程中起到关键作用,可以帮助确定机器人的路径和姿态。例如,当机器人从一点移动到另一点时,会根据设定的“S”和“T”参数来规划一条最优的路径进行移动。但它们并不等于欧拉角,而是有其特殊的意义和用途。
在KUKA机器人示教器上可以查看机器人的实际位置,包括A、B、C以及S(状态)和T(Turn)。如下图:
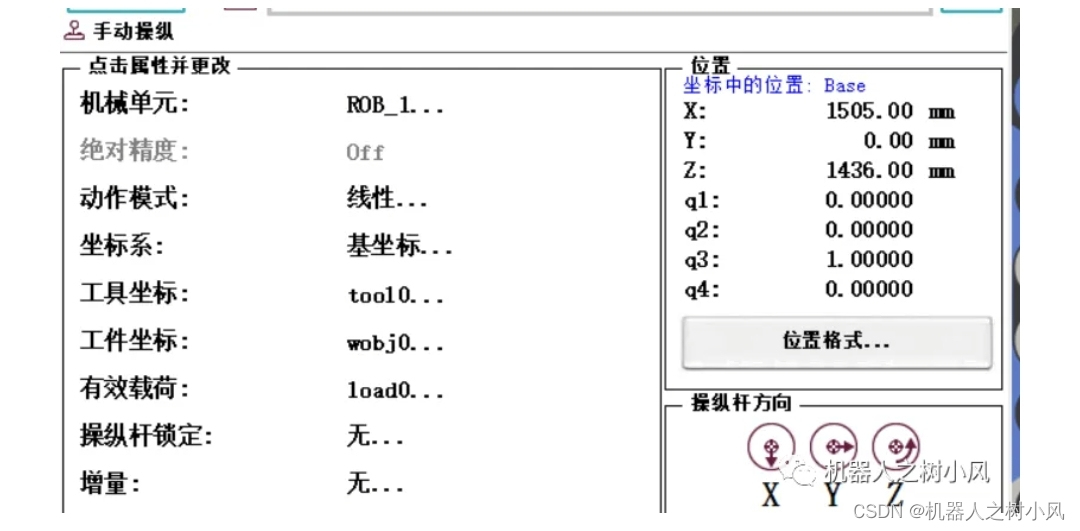
二、而ABB机器人使用的是四元数(q1、q2、q3和q4)来表示机器人的姿态。四元数是一种数学工具,可以用来表示三维空间中的旋转,它比欧拉角更为直观且不易产生"万向锁"问题。例如,当ABB机器人的五个轴都垂直向下时,四元数为[0,0,-1,0]或[0,0,1,0];当五个轴都垂直向上时,四元数为[1,0,0,0]或[-1,0,0,0]。这些四元数可以帮助我们精确地定义机器人在工作空间中的方向。为了方便理解与操作,ABB机器人也提供了欧拉角与四元数之间的转换关系,可以通过特定的函数将欧拉角转换为四元数,也可以将四元数转换为欧拉角。这种转换关系使ABB机器人的控制更为灵活,可以根据具体的应用需求选择最适合的姿态表示方法。
ABB机器人的四元数查看如图:
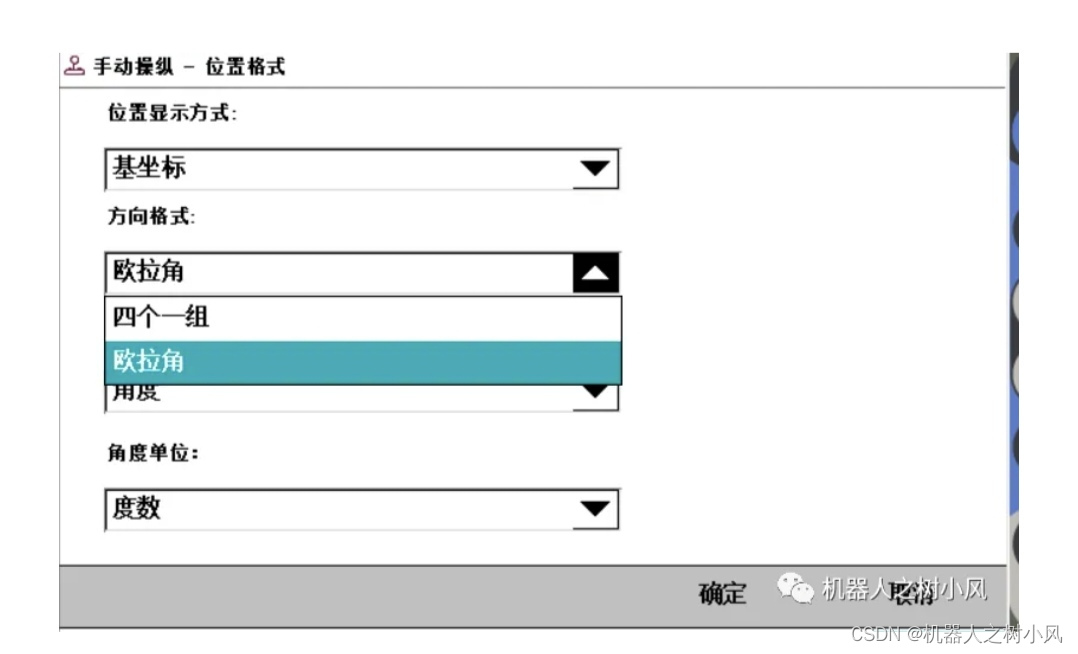
也可以点击【位置格式】,进行【欧拉角】的选择,就可以查看RX、RY、RZ的值了。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/368665
推荐阅读
相关标签

