- 1Linux下Root权限无法读取文件探究_输入输出错误,尝试对 进行stat调用时
- 2软件测试入职一年多薪资正常应该有多少?_软件测试有经验一年的工作薪资
- 3navicat premium 12+ Mac 3分钟 破解方案_all patch solutions are suppressed
- 4云计算——ACA学习 阿里云云计算服务概述_飞天操作系统
- 5构建第一个ArkTS应用(纯HarmonyOS应用)_arkts sdk版本
- 6hi3861 OpenHarmony PCA9685 舵机控制板
- 7docker inspect命令详解_docker inspect 详解
- 8使用TortoiseGit处理代码冲突
- 9训练自己的yolov5样本, 并部署到rv1126 <四>_rk_mpi_sys_getmediabuffer
- 10用python写个基于深度学习的股票价格预测模型
OpenCV中使用YOLO对象检测
赞
踩
点击上方“小白学视觉”,选择加"星标"或“置顶”
- 重磅干货,第一时间送达
-
本文转自:opencv学堂
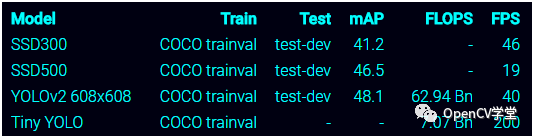
OpenCV在3.3.1的版本中开始正式支持Darknet网络框架并且支持YOLO1与YOLO2以及YOLO Tiny网络模型的导入与使用。YOLO是一种比SSD还要快的对象检测网络模型,算法作者在其论文中说FPS是Fast R-CNN的100倍,基于COCO数据集跟SSD网络的各项指标对比
在最新的OpenCV3.4上我也测试了YOLO3,发现不支持,因为YOLO3有个新层类型shortcut,OpenCV3.4的Darknet暂时还不支持。这里首先简单的介绍一下YOLO网络基本结构,然后在通过代码演示Darknet支持的YOLO在OpenCV使用。
一:YOLO网络
对象检测网络基本上可以分为两种,一种称为两步法、另外一种称为一步法,很显然基于图像分类加上滑动窗口的方式最早的R-CNN就是两步法的代表之一,两步法的前面基本上是一个卷积神经网络,可以是VGGNet或者Inception之类的,然后再加上一个滑动窗口,但是这种方法太慢,所以就有了区域推荐(RP),预先推荐一些感兴趣的区域,进行预言,这些方法普遍有一个缺点,计算量比较大,导致性能低下无法实时,而YOLO采样了一种完全不同的方法,达到对图像每个区域只计算一次(You Only Look Once - YOLO),YOLO把图像分为13x13的Cell(网格):

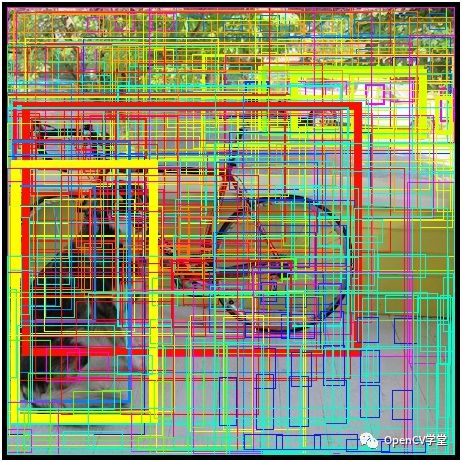
每个Cell预测5个BOX,同时YOLO也会生成一个置信分数,告诉每个BOX包含某个对象的可能性是多少,注意置信分数不会直接说明BOX内是检测到何种对象,最终那些得分高的BOX被加粗显示如下:

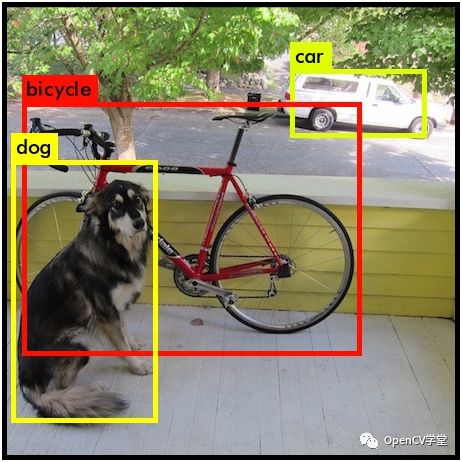
对于每个BOX来说,Cell会预测检测对象类别,这部分的工作就像是一个分类器一样,基于VOC数据集20中对象检测,YOLO结合分数与分类信息对每个BOX给出一个最终可能对象类型的可能性值,如下图,黄色区域85%可能性是狗:
因为总数是13x13的网格,每个网格预言5个BOX,所以最终有854个BOX,证据表明绝大多数的BOX得分会很低,我们只要保留30%BOX即可(取决于你自己的阈值设置),最终输出:
从上面可以看出整个图像只是被计算了一次,真正做到了降低计算量,提高了检测实时性。上述检测使用的YOLO的网络结构如下:
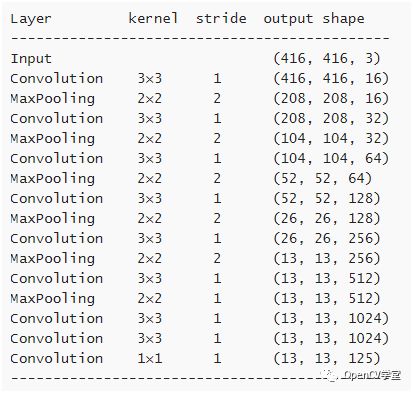
发现只有CNN层,没有FC层,是不是简单到爆,最后说一下为什么最后一层卷积层深度是125, 因为每个Cell检测5个BOX,对每个BOX来说,包含如下数据
BOX本身信息,x、y、w、h
置信分数
基于VOC数据集的20个对象类别
所以对每个BOX来说有25个参数,5个BOX= 5x25=125个参数。
上面是得到的网络模型就是tiny-YOLO网络模型,可以在移动端实时对象检测。这个跟作者在论文中提到的稍微有点差异,论文中作者是输入图像为448x448,分为7x7的网格(Cell),结构如下:
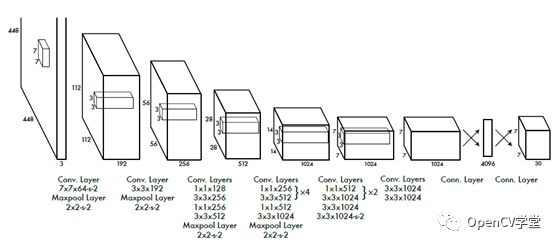
最终输出是每个Cell预测两个BOX,做20个分类,它得到最终是
BOX本身信息,x、y、w、h
置信分数
深度 = SS(B5+20), 其中20个表示分类数目,S表示网络分割,B表示BOX个数。S=7、B=2,最终输出是77*30
二:在OpenCV中使用YOLO
OpenCV在3.3.1版本中开始支持Darknet,可能有人会问,Darknet是什么鬼,它是YOLO的作者自己搞出来的深度学习框架,支持C/C++/Python语言,支持YOLOv1、YOLOv2、YOLOv3等网络模型训练与使用。但是在OpenCV只是前馈网络,只支持预测,不能训练。OpenCV中基于YOLO模型我使用的是tiny-YOLO网络模型,支持20中对象检测。代码实现步骤如下:1.加载网络模型
- String modelConfiguration = "D:/vcprojects/images/dnn/yolov2-tiny-voc/yolov2-tiny-voc.cfg";
- String modelBinary = "D:/vcprojects/images/dnn/yolov2-tiny-voc/yolov2-tiny-voc.weights";
- dnn::Net net = readNetFromDarknet(modelConfiguration, modelBinary);
- if (net.empty())
- {
- printf("Could not load net...\n");
- return;
- }
2.加载分类信息
- vector<string> classNamesVec;
- ifstream classNamesFile("D:/vcprojects/images/dnn/yolov2-tiny-voc/voc.names");
- if (classNamesFile.is_open())
- {
- string className = "";
- while (std::getline(classNamesFile, className))
- classNamesVec.push_back(className);
- }
3.加载测试图像
- // 加载图像
- Mat frame = imread("D:/vcprojects/images/fastrcnn.jpg");
- Mat inputBlob = blobFromImage(frame, 1 / 255.F, Size(416, 416), Scalar(), true, false);
- net.setInput(inputBlob, "data");
4.检测
- // 检测
- Mat detectionMat = net.forward("detection_out");
- vector<double> layersTimings;
- double freq = getTickFrequency() / 1000;
- double time = net.getPerfProfile(layersTimings) / freq;
- ostringstream ss;
- ss << "detection time: " << time << " ms";
- putText(frame, ss.str(), Point(20, 20), 0, 0.5, Scalar(0, 0, 255));
5.显示与运行效果
- // 输出结果
- for (int i = 0; i < detectionMat.rows; i++)
- {
- const int probability_index = 5;
- const int probability_size = detectionMat.cols - probability_index;
- float *prob_array_ptr = &detectionMat.at<float>(i, probability_index);
- size_t objectClass = max_element(prob_array_ptr, prob_array_ptr + probability_size) - prob_array_ptr;
- float confidence = detectionMat.at<float>(i, (int)objectClass + probability_index);
- if (confidence > confidenceThreshold)
- {
- float x = detectionMat.at<float>(i, 0);
- float y = detectionMat.at<float>(i, 1);
- float width = detectionMat.at<float>(i, 2);
- float height = detectionMat.at<float>(i, 3);
- int xLeftBottom = static_cast<int>((x - width / 2) * frame.cols);
- int yLeftBottom = static_cast<int>((y - height / 2) * frame.rows);
- int xRightTop = static_cast<int>((x + width / 2) * frame.cols);
- int yRightTop = static_cast<int>((y + height / 2) * frame.rows);
- Rect object(xLeftBottom, yLeftBottom,
- xRightTop - xLeftBottom,
- yRightTop - yLeftBottom);
- rectangle(frame, object, Scalar(0, 0, 255), 2, 8);
- if (objectClass < classNamesVec.size())
- {
- ss.str("");
- ss << confidence;
- String conf(ss.str());
- String label = String(classNamesVec[objectClass]) + ": " + conf;
- int baseLine = 0;
- Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
- rectangle(frame, Rect(Point(xLeftBottom, yLeftBottom),
- Size(labelSize.width, labelSize.height + baseLine)),
- Scalar(255, 255, 255), CV_FILLED);
- putText(frame, label, Point(xLeftBottom, yLeftBottom + labelSize.height),
- FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 0, 0));
- }
- }
- }
- imshow("YOLO-Detections", frame);

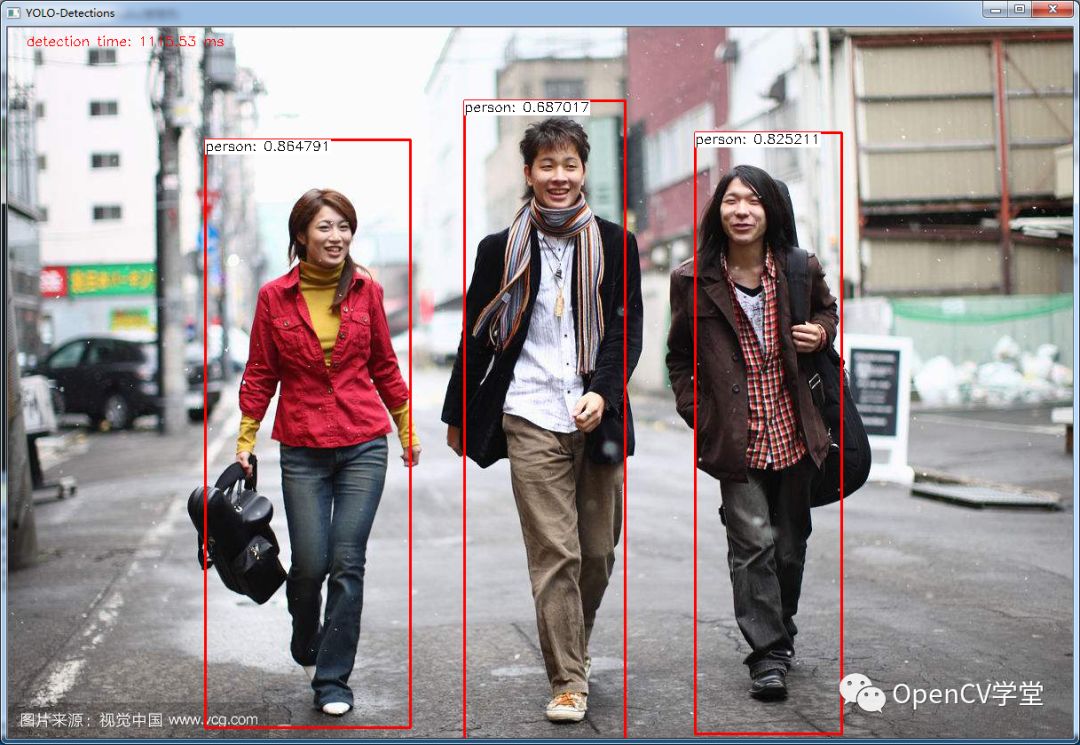
运行结果如下:
文章中提到模型可以到本人的GITHUB上下载即可,地址如下
https://github.com/gloomyfish1998/opencv_tutorial
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~