
- 1超级简单的Python爬虫入门教程(非常详细),通俗易懂,看一遍就会了_爬虫python入门
- 2【Doris】Doris 最佳实践-Compaction调优(3)_doris中如何查看哪个表的版本有堆积?
- 3⑩② 【MySQL索引】详解MySQL`索引`:结构、分类、性能分析、设计及使用规则。_mysql 索引名带`
- 4CentOS 7.6 防火墙打开、关闭,端口开启、关闭_centos7.6开放端口命令
- 5李宏毅-2023春机器学习 ML2023 SPRING-学习笔记:2/24 正确认识chatGPT_李宏毅2023gpt
- 6yaw(pan)/pitch(tilt)/roll计算_yaw pitch roll计算
- 7Vivado PLL锁相环 IP核的使用
- 8雪花id如何保证连续且不重复
- 9解决ssh:connect to host github.com port 22: Connection timed out与kex_exchange_identification_cloning into 'gonganzichan'... ssh: connect to hos
- 10循环队列的初始化,入队,出队,求队长,取队头元素_循环队列初始化
全地形比赛小车制作分享_全地形小车设计思路
赞
踩
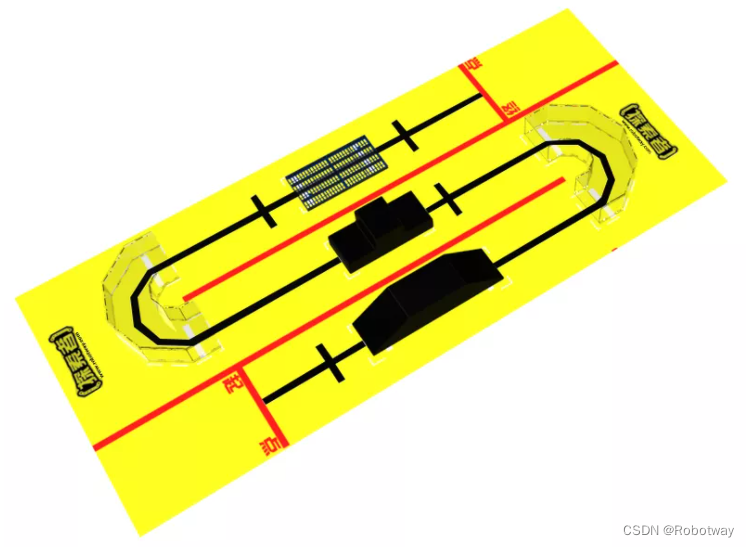
1. 比赛场地
场地中设定四种五个不同特点、不同难度的障碍物,每种障碍物均有一定的分值,参赛队根据比赛规则自主设计制作机器人,完成穿越各个障碍物的比赛。
障碍物分别为模拟工业用栅格地毯、楼梯、管道、独木桥,各障碍物由黑色引导线连接,形成完整的比赛赛道,并设置比赛起点和终点,比赛场地由组委会统一布置。
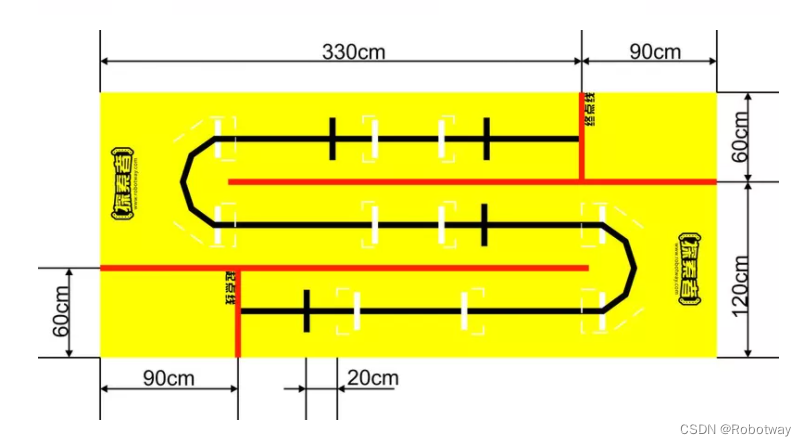
比赛场地及四种障碍物(栅格地面,管道,窄桥,楼梯)尺寸标记(含引导黑线、比赛起点和终点)。
(1)场地整体图:
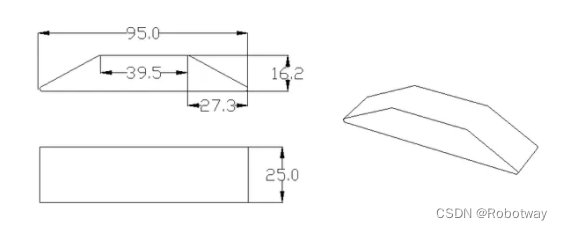
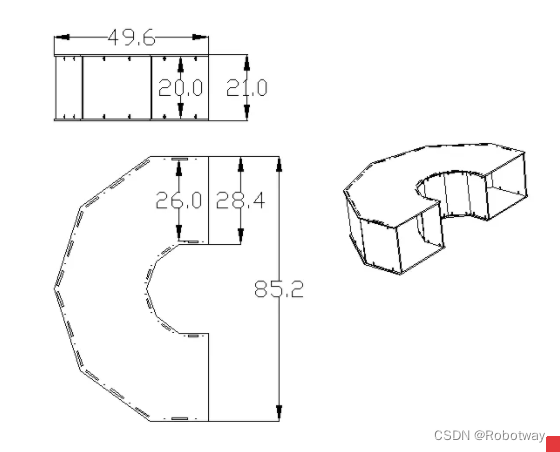
(2)窄桥尺寸图:
单位:cm
材料:发泡EVA
颜色:黑色
(3)台阶尺寸图:
单位:cm
材料:发泡EVA
颜色:黑色
(4)管道尺寸图:
单位:cm
材料:亚克力
颜色:透明
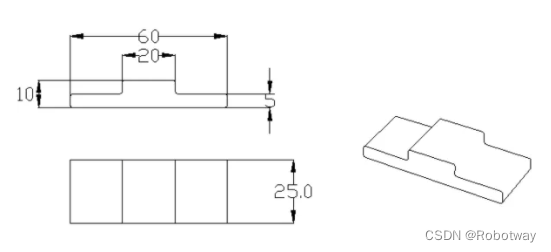
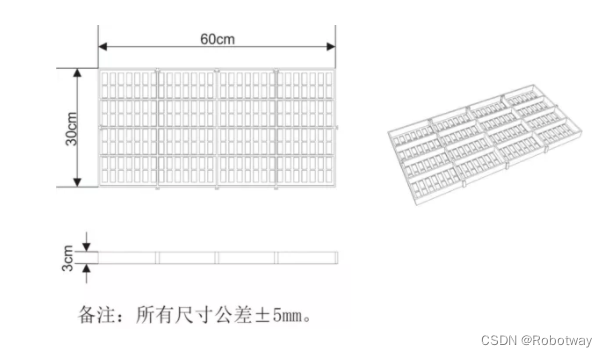
(5)栅格地面尺寸图:
单位:cm
材料:工程塑料
颜色:蓝色
2. 示例样机
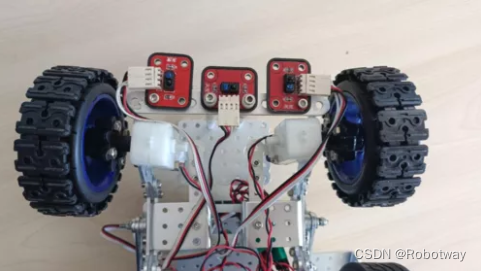
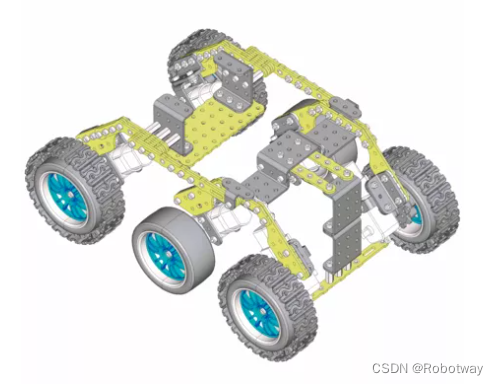
本文采用的示例样机,在四个前后轮上缠绕了履带片以增大轮径,提高越障的性能。
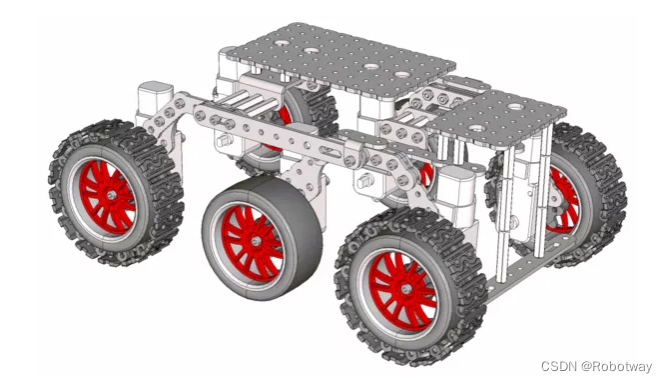
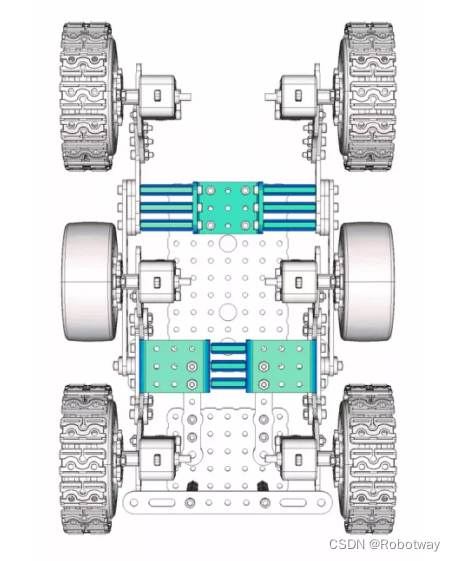
两侧摇臂用零件(下图所示蓝色零件)固定在了一起,单侧摇臂不能单独摆动,只能同时摆动,损失了一些灵活性,但是增加了行驶中的稳定性,尤其是增加了攀爬越障时的稳定性,车身不容易跑偏。
车头位置并排安装3个灰度传感器。

3. 示例程序
电子模块:Arduino UNO(Basra控制板)×1,Bigfish扩展板×1,灰度传感器×3。
编程环境:Arduino1.8.19
程序源代码如下:
| /*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-26 https://www.robotway.com/ -------------------------------- 实验功能: 实现小车沿黑线行驶,遇到黑线构成的路口能够按既定策略执行. 假想循迹场地,有直线、左转弯、右转弯、十字路口; -------------------------------- 实验接线: 小车车头并排安装三个灰度传感器 车头 .------------. | | | | 左侧轮 | | 右侧轮 D5, D6 *------------* D9, D10
----------------------------------------------------------------------------------*/ // //; int pin[3] = {A4, A3, A0}; //按车头前进方向,从右至左定义,后面经过公式计算,会转化为从左至右的顺序 int s; void setup() { pinMode( 5 , OUTPUT); pinMode( 6 , OUTPUT); pinMode( 9 , OUTPUT); pinMode( 10 , OUTPUT); } void loop() { s = 0; for(int i=0; i<3; i++) //循环获取三个传感器的值 { s|= (!digitalRead(pin[i]) << i); //经过左移运算和或运算后,按照A0、A3、A4的顺序产生一个三位2进制数值,表示3个传感器的组合触发状态 } switch (s) { case 0x00: //三个均未触发 Forwards(); break; case 0x01: //右侧传感器触发,直线上摆动或遇到右转弯 Right(); break; case 0x02: //中间传感器触发,直线上直行 Forwards(); break; case 0x03: //右侧两个触发,遇到右转弯 Right(); break; case 0x04: //左侧传感器触发,直线上摆动或遇到左转弯 Left(); break; case 0x06: //左侧两个触发,遇到左转弯 Left(); break; case 0x07: //三个同时触发,遇到十字路口 Forwards(); break; default:;break; } } void Left() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , LOW ); digitalWrite( 10 , LOW ); } void Right() { digitalWrite( 5 , LOW ); digitalWrite( 6 , LOW ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } void Forwards() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } |
4. 样机扩展
也可以使用探索者的各类兼容零件制作样机
5. 资料下载
资料内容:月球车底盘-全地形比赛-样机3D文件、月球车底盘-全地形比赛-例程文件、全地形赛-场地制作文件
详情请参考: 全地形比赛-月球车

