
热门标签
热门文章
- 1Linux基础 - SSH之秘钥登录_chmod 600 id_rsa
- 2免费安全的内网穿透实现——Tailscale_tailscale windows
- 3sublime text 格式化json快捷键配置_sublime text json
- 4物联网(AIOT)--下一个技术风口_物联网设备层
- 5windows环境下yolov5使用tensorrt加速,生成engine文件_yolov5 export.py
- 6基于注意力机制的seq2seq模型_基于点积的注意力机制 seq2seq
- 7python抖音github_使用 Python 下载抖音无水印视频
- 8mac下Tomcat的安装和配置_tomcat foler
- 9实测物联网平台云监控WEB设备iot系统源码_iot源代码
- 10NLP(六十五)LangChain中的重连(retry)机制_retrying langchain_google_genai.chat_models._chat_
当前位置: article > 正文
livox-avia+Ubuntu简单使用_livox avia ipv4
作者:小蓝xlanll | 2024-04-24 21:04:26
赞
踩
livox avia ipv4
安装ROS和LIVOX-SDK,具体参考我之前的链接:
FAST-LIO算法前置安装教程_ubuntu20.04系统运行fast-lio1-CSDN博客
安装好后直接网线接口连接。
使用ifconfig确定livox的网线接口ip地址是哪个。
使用usb转网线的需要注意,可能ifconfig里面显示会没有IPv4地址。如果无法确认就拔了查一遍,插上再查一遍。
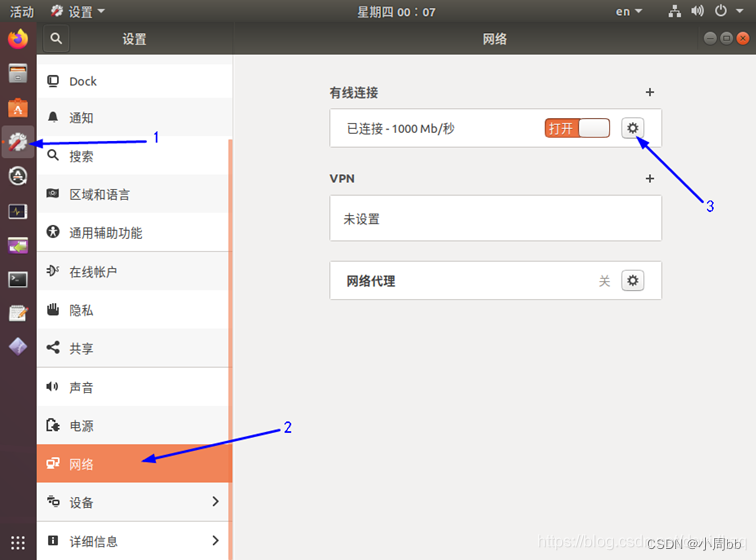
确定好端口之后,直接在设置里面修改ip地址。
具体的ip地址是192.168.1.1XX,掩码是255.255.255.0,具体ip看设备,若是没办法确认可以在window的livox-viewer里面看到(注意修改的IP地址要和设备不一样,可以只差一位)。
最后在ws_livox文件夹下的终端输入:
- source devel/setup.bash
- roslaunch livox_ros_driver livox_lidar.launch
雷达数据就会显示在rviz上。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/481534
推荐阅读
相关标签

