- 1Ubuntu 安装RabbitMQ_ubuntu离线安装rabbitmq
- 2HTML5 表单新增的属性
- 3如何判断循环队列为队空or队满?_判断循环队列为空和队满的条件
- 4面试 SQL整理 常见的SQL面试题:经典50题
- 5ViewPager和ViewPager2的简单使用,TabLayout与ViewPager2联用以及轮播图的实现。_tablayout和viewpager2
- 6前端必备————图片转换成css或js方法_根据图片自动写css
- 7.NET框架- in ,out, ref , paras使用的代码总结 C#中in,out,ref的作用 C#需知--长度可变参数--Params C#中的 具名参数 和 可选参数 DEMO...
- 8YOLOv7论文,网络结构,官方源码,超详细解
- 9Xinlinx zynq7045国产替代 FMQL45T900全国产化 ARM开发板_xinlinx7045的gtxbank最高速率
- 10Android studio第一次构建Gradle项目下载很慢甚至失败的解决方法_android studio grade一直下载不好怎么办
采用keras深度学习框架搭建卷积神经网络模型实现垃圾分类,基于树莓派上进行实时视频流的垃圾识别源代码_keras cnn图像分类代码
赞
踩
一、项目概述
简介:该垃圾分类项目主要在于对各种垃圾进行所属归类,本次项目采用keras深度学习框架搭建卷积神经网络模型实现图像分类,最终移植在树莓派上进行实时视频流的垃圾识别。
前期:主要考虑PC端性能,并尽可能优化模型大小,训练可采用GPU,但调用模型测试的时候用CPU运行,测试帧率和准确性(测试10张左右图像的运行时间取平均值或实时视频流的帧率)。
后期:部署在树莓派端,在本地进行USB摄像头实时视频流的垃圾分类(归类)。
框架语言: keras+python。
PC端:
Keras: 2.2.0
Opencv: 3.4
Python: 3.6
Numpy:1.16
二、数据集
data1: https://www.kaggle.com/asdasdasasdas/garbage-classification
数据集包含6个分类:cardboard (393), glass (491), metal (400), paper(584), plastic (472) andtrash(127).
data2: https://www.kesci.com/home/dataset/5d133d11708b90002c570588
该数据集是图片数据,分为训练集85%(Train)和测试集15%(Test)。其中O代表Organic(有机垃圾),R代表Recycle(可回收)。
data3 : https://copyfuture.com/blogs-details/2020083113423317484akwfwu4mzs89w
一共 56528 张图片,214 类,总共 7.13 GB。
三、leNet5 模型搭建
本次项目采用深度学习来进行图像识别,如今深度学习中最流行的无疑是卷积神经网络,因此,我们搭建了包含5层卷积层的神经网络来进行垃圾分类。
由于本次项目包含三个数据集,对应三个类别(6分类,2分类,214分类),但是设计的模型都是一样的,因此,下面就以data1进行网络搭建、训练、测试讲解。
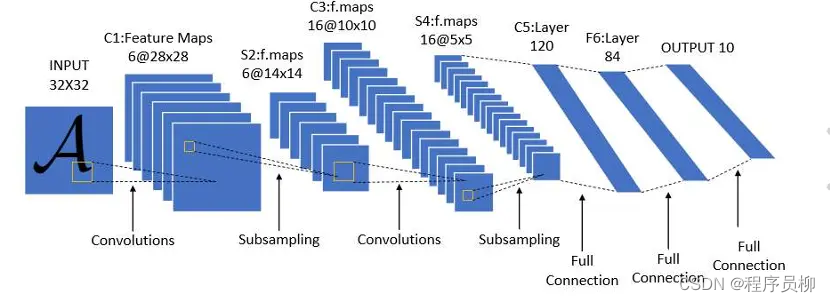
卷积神经网络实例
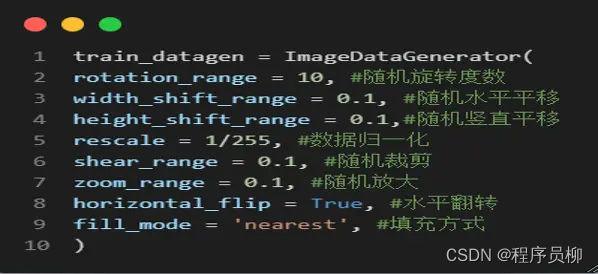
在正式训练之前我们还使用了数据增广技术(ImageDataGenerator)来对我们的小数据集进行数据增强(对数据集图像进行随机旋转、移动、翻转、剪切等),以加强模型的泛化能力。
1、模型构建
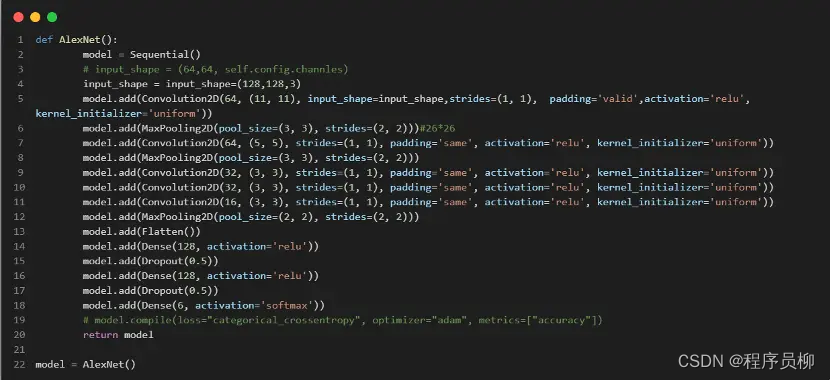
其中conv2d表示执行卷积,maxpooling2d表示执行最大池化,Activation表示特定的激活函数类型,Flatten层用来将输入“压平”,用于卷积层到全连接层的过渡,Dense表示全连接层(128-128-6,最后一位表示分类数目)。
参数设置:为训练设置一些参数,比如训练的epoches,batch_szie,learning rate等
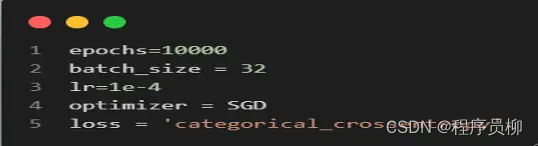
在这里我们使用了SGD优化器,由于这个任务是一个多分类问题,可以使用类别交叉熵(categorical_crossentropy)。但如果执行的分类任务仅有两类,那损失函数应更换为二进制交叉熵损失函数(binary cross-entropy)

2、模型保存
将神经网络在data1数据集上训练的结果(参数,权重文件)进行保存,方便后期调用训练好的模型进行预测。
模型保存文件名为:trash_data1_AlexNet3.h5, 我们设置为保存模型效果最好的一次。

四、训练并测试
首先是观察数据,看看我们要识别的垃圾种类有多少,以及每一类的图片有多少。
1、训练结果
训练代码已经写好了,接下来开始训练(图片归一化尺寸为128,batch_size为32,epoches为5000,一般5k就已经算比较多的啦,效果好的话可以提前结束)。
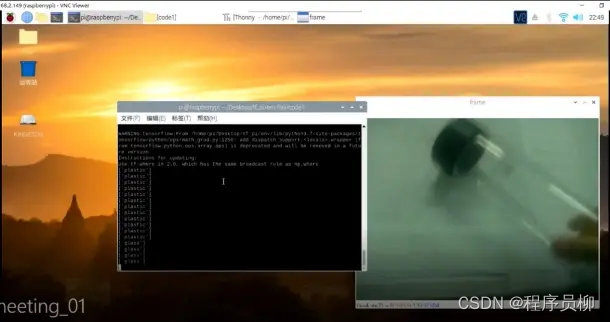
进行训练

训练过程中的打印结果:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uMn5Uw7C-1677564333820)(https://images.gitee.com/uploads/images/2021/0926/154235_83fc43cd_5661830.png "图片 8.png")]](https://img-blog.csdnimg.cn/9b769a7ccd7c4160a75fcdcf77143978.png)
2、模型保存
3、预测单张图片
现在我们已经得到了我们训练好的模型trash_data1_AlexNet3.h5,然后我们编写一个专门用于预测的脚本predict.py
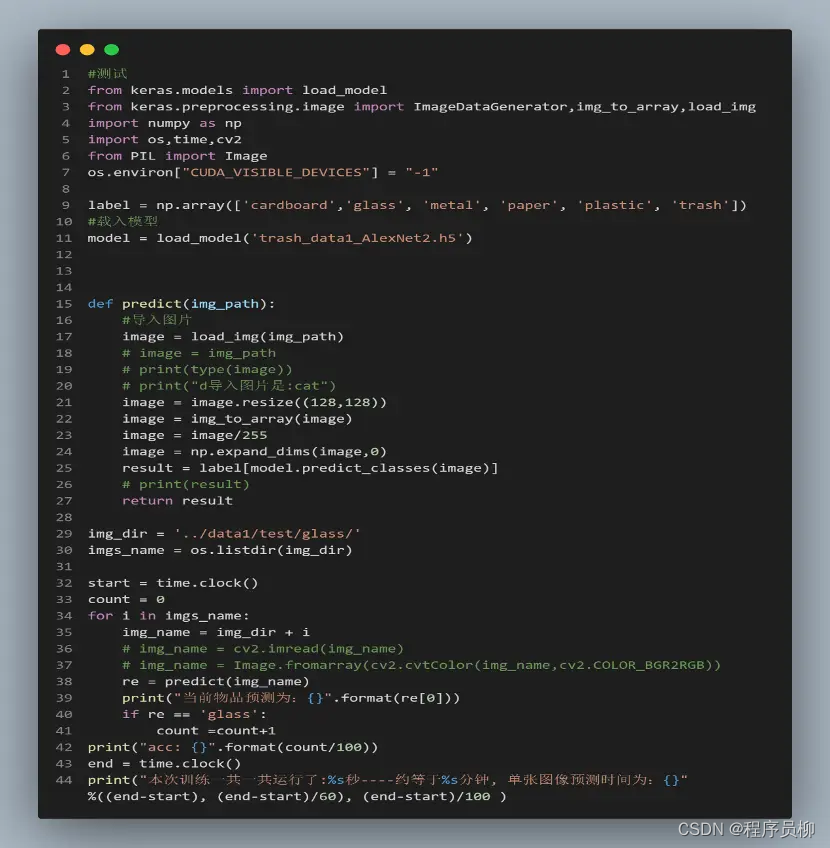
预测脚本中的代码编写思路是:载入训练好的模型-》读入图片信息-》预测-》展示预测效果
我们这里写了一个循环测试,方便计算单张图像的预测时间
4、测试结果
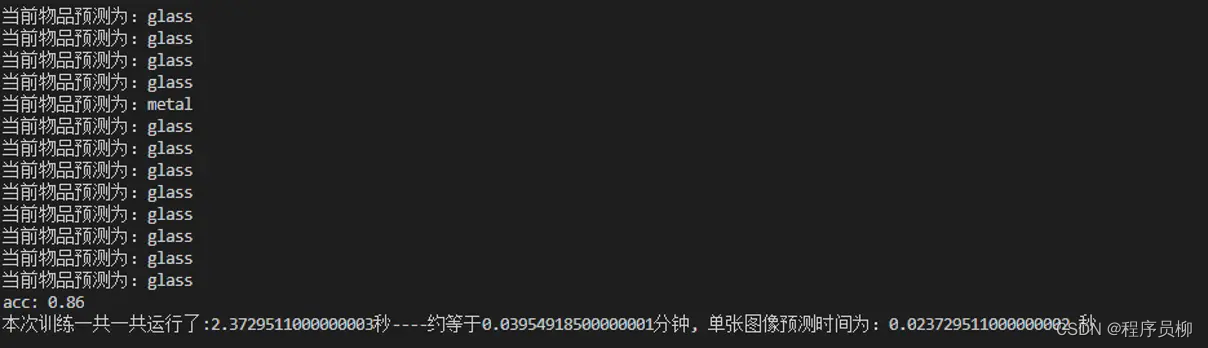
data1:
model size: 178M
acc accuracy(test) :86%
硬件:AMD R5 3600 内存:16G
测试100张图像耗时:2.37s
单张图像耗时:0.0237s
data2:
model size: 128M
acc accuracy(test) :94%
硬件:AMD R5 3600 内存:16G
测试1112张图像耗时:90.52s
单张图像耗时:0.0814
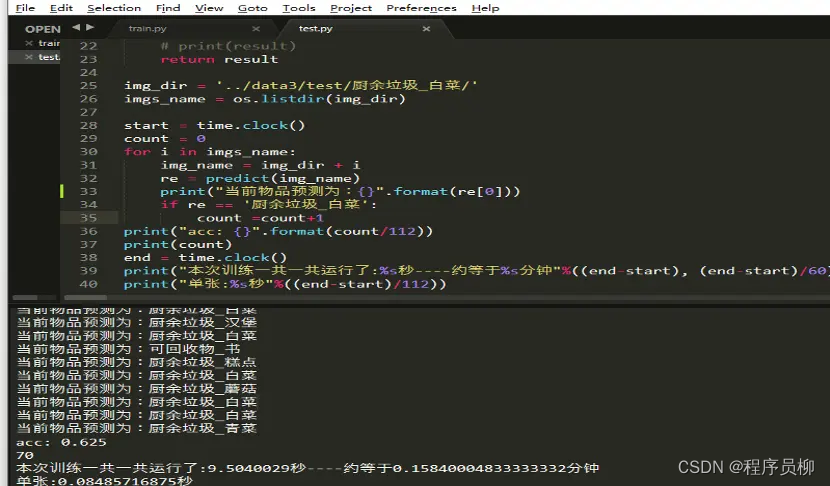
data3
model size: 128M
acc accuracy(test) :72%
硬件:AMD R5 3600 内存:16G
测试1112张图像耗时:8.69s
单张图像耗时:0.077
五、树莓派端部署/配置深度学习环境
系统环境:2020-08-20-raspios-buster-armhf-full
**工程要求:Tensorflow 1.14.0+ Keras 2.2.4 + Python 3.7 **
1、配置好ssh和vnc之后,换源:
第一步,先备份源文件
sudo cp/etc/apt/sources.list /etc/apt/sources.list.bak
sudo cp/etc/apt/sources.list.d/raspi.list /etc/apt/sources.list.d/raspi.list.bak
- 1
- 2
- 3
第二步,编辑系统源文件
sudo nano/etc/apt/sources.list
- 1
第三步,将初始的源使用#注释掉,添加如下两行清华的镜像源。Ctrl+O ++ Ctrl+X
【注意】这里的树莓派系统是Raspbian-buster系统,在写系统源链接时要注意是buster,网上很多教程都是之前stretch版本,容易出错!
debhttp://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main contribnon-free rpi
deb-srchttp://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main contribnon-free rpi
- 1
- 2
- 3
第四步,保存执行如下命令sudo apt-get update,完成源的更新软件包索引。
sudo apt-get update&&upgrade
- 1
第五步,还需要更改系统源
sudo nano/etc/apt/sources.list.d/raspi.list
- 1
用#注释掉原文件内容,用以下内容取代:用#注释掉原文件内容,用以下内容取代:
debhttp://mirrors.tuna.tsinghua.edu.cn/raspberrypi/ buster main ui
deb-srchttp://mirrors.tuna.tsinghua.edu.cn/raspberrypi/ buster main ui
- 1
- 2
- 3
第六步,配置换源脚本,更改pip源
新建文件夹:
mkdir ~/.pip
sudo nano~/.pip/pip.conf
- 1
- 2
- 3
在pip.conf文件中输入以下内容:
[global]
timeout=100
index-url=https://pypi.tuna.tsinghua.edu.cn/simple/
extra-index-url=http://mirrors.aliyun.com/pypi/simple/
[install]
trusted-host=
pypi.tuna.tsinghua.edu.cn
mirrors.aliyun.com
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
2、python虚拟环境配置
首先进行系统软件包更新
sudo apt-getupdate
sudo apt-getupgrade
sudorpi-update
- 1
- 2
- 3
- 4
- 5
然后更新自带的pip,由于Raspbian自带的pip3为9.0.1版本,较为老旧,我们使用以下命令来更新pip3:
python3 -mpip install --upgrade pip
- 1
尝试在更新完pip3后,键入命令:
pip3 list
- 1
新建个文件夹(虚拟环境用)
cd Desktop
mkdir tf_pi
cd tf_pi
- 1
- 2
- 3
- 4
- 5
安装虚拟环境这个好东西
python3 -mpip install virtualenv
- 1
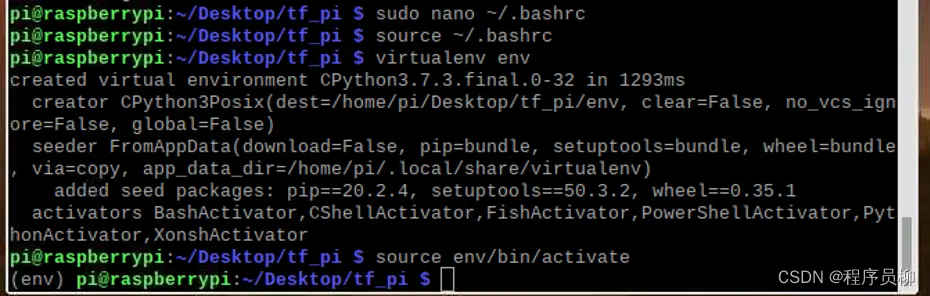
增加环境变量,使得该好东西可以用起来
sudo chmod -R777 /root/.bashrc
sudo nano ~/.bashrc
- 1
- 2
- 3
把exportPATH=/home/pi/.local/bin/:$PATH 放到最后,添加环境变量
source ~/.bashrc
- 1
成功了之后:整一个虚拟环境
virtualenvenv
sourceenv/bin/activate
- 1
- 2
- 3
3、安装tensorflow1.14.0
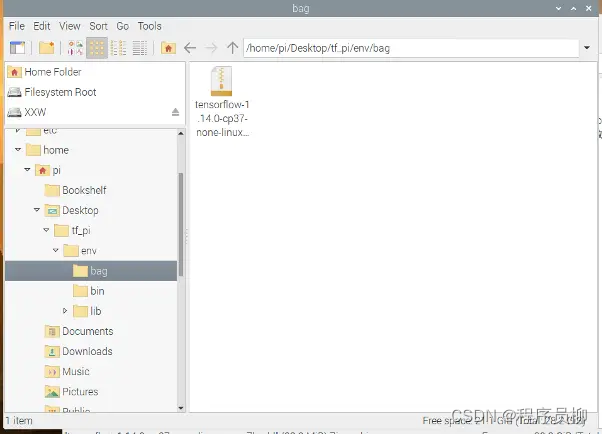
用电脑下载:(链接)python3.7版本只能安装1.14.0-Buster版本的TensorFlow
https://github.com/lhelontra/tensorflow-on-arm/releases/tag/v1.14.0-buster

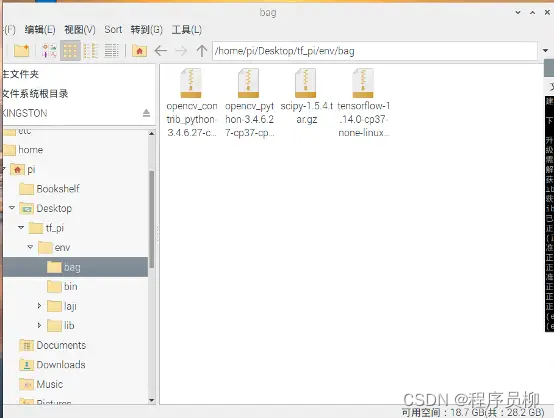
用U盘将这个文件拷到树莓派上,建一个bag文件夹存放
安装依赖包:
sudo aptinstall libatlas-base-dev
- 1
安装一些环境
sudo apt-getinstall -y libhdf5-dev libc-ares-dev libeigen3-dev
python3 -mpip install keras_applications==1.0.8 --no-deps
python3 -mpip install keras_preprocessing==1.1.0 --no-deps
python3 -mpip install h5py==2.9.0
sudo apt-getinstall -y openmpi-bin libopenmpi-dev
sudo apt-getinstall -y libatlas-base-dev
python3 -mpip install -U six wheel mock
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
安装tensorflow
cd env
cd bag
pip3 install tensorflow-1.14.0-cp37-none-linux_armv7l.whl
- 1
- 2
- 3
- 4
- 5
这里要安装二十分钟。。。出错了再来一遍就好了。。
测试是否成功并查看版本:
python
import tensorflow as tf
tf.version
- 1
- 2
- 3
- 4
- 5
4、安装keras
安装一些依赖
sudo apt-getinstall libhdf5-serial-dev
pip3 installh5py
sudo apt-getinstall gfortran
sudo aptinstall libopenblas-dev
pip3 install-i https://pypi.tuna.tsinghua.edu.cn/simple/ pillow
sudo pip3install pybind11
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
第一个下载numpy:第一次的时候发现安装成功但调用失败了,我觉得是numpy版本过高导致出错了
下载keras还是tensorflow的时候会自动下载numpy(之前已存在,它会先卸载再安装高版本的numpy,之前不存在,它会直接安装高版本的numpy),所以要先下载keras,再卸载numpy,然后再安装低版本的numpy
看一下子numpy版本,太高了
重新安装
pip3uninstall numpy
pip3 installnumpy==1.16.0
- 1
- 2
- 3
第二个下载scipy【直接pip安装百分之九十九的可能都会失败。所以先下载再安装。。。先下载这个链接复制到树莓派上,然后解压到指定文件夹/home/pi/Desktop/tf_pi/env/lib/python3.7/site-packages下】
https://mirrors.tuna.tsinghua.edu.cn/pypi/web/packages/aa/d5/dd06fe0e274e579e1dff21aa021219c039df40e39709fabe559faed072a5/scipy-1.5.4.tar.gz
cd/home/pi/Desktop/tf_pi/env/bag
- 1
tar -zxvf scipy-1.5.4.tar.gz-C /home/pi/Desktop/tf_pi/env/lib/python3.7/site-packages
然后进到这个文件夹里开启安装:【花里胡哨的各种代码配置呀啥的,会安装三十分钟左右】
cd /home/pi/Desktop/tf_pi/env/lib/python3.7/site-packages/scipy-1.5.4
pythonsetup.py install
- 1
- 2
- 3
pip3 list看一看:【太六了,终于成功了】

再使用这个命令安装keras:
pip3 install keras==2.2.4
- 1
请注意;由于在virtualenv里面,一定一定要避免sudo pip3 install,否则会安装到默认路径下!发现keras安装到默认环境了,所以调用不成功,pip list没有
解决办法重新安装
pip3install keras==2.2.4
- 1
安装好了之后记得reboot重启一下子。
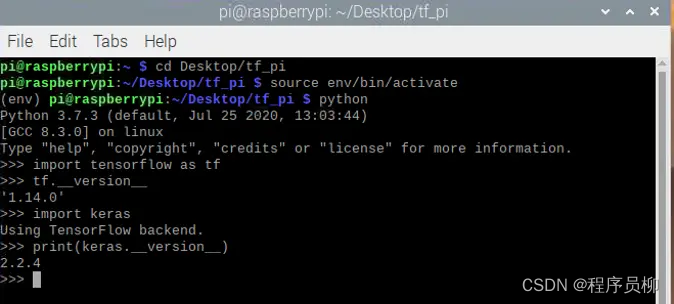
5、开始测试;import keras前面加import os就能忽略提示
因为keras可以配合很多框架,我们用的tf所以会有backend的提示
进入虚拟环境:
cd ~/Desktop/tf_pi
sourceenv/bin/activate
- 1
- 2
- 3
python
import tensorflowas tf
tf.__version__
import keras
print(keras.__version__)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
六、用树莓派跑分类识别的代码
系统环境:2020-08-20-raspios-buster-armhf-full
**工程要求:Tensorflow 1.14.0+ Keras 2.2.4 + Python 3.7 **
1、把代码还有图片集,拷到树莓派上
其实Filezilla这个FTP传输就很方便
2、激活虚拟环境
cd ~/Desktop/tf_pi
sourceenv/bin/activate
- 1
- 2
- 3
3、克隆代码并进入代码目录
克隆代码
cd ~/Desktop/tf_pi/env
git clone https://gitee.com/yangkun_monster/raspberrypi-Garbage-classification.git
- 1
- 2
- 3
- 4
若提示git命令未找到:
sudo apt-get install git
进入代码目录:
cd ~/Desktop/tf_pi/env/Garbage-Classification/code1
- 1
这里更改test.py的测试集路径
pythontest.py
- 1
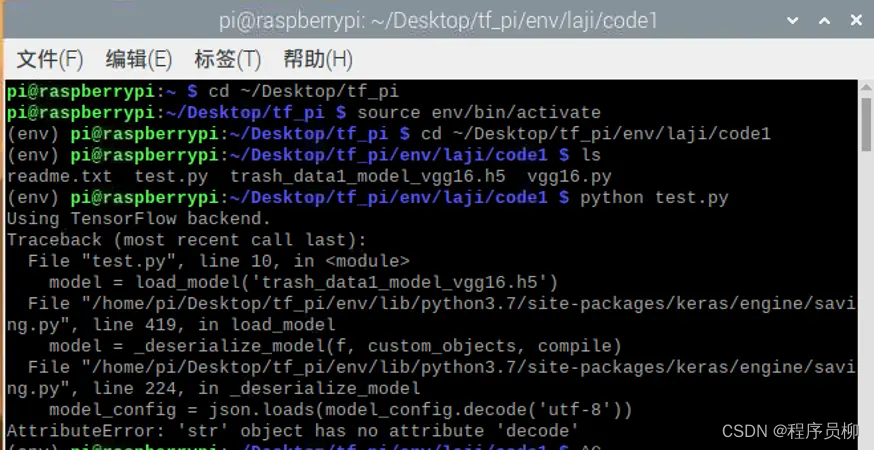
发现有个文件解码有问题,于是根据错误的消息的路径,去这里:
/home/pi/Desktop/tf_pi/env/lib/python3.7/site-packages/keras/engine
- 1
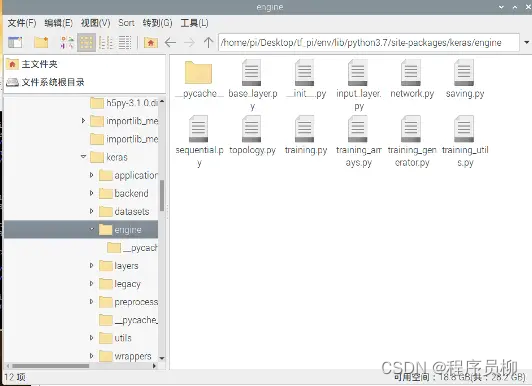
在.decode(‘utf-8’)前面加.encode(‘utf8’)
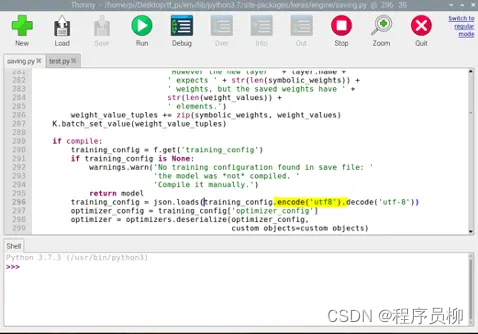
再次到测试这里运行python test.py,解决了!
测试AlexNet需要把test.py文件里的权重文件路径改了,把输入图片维度由(150,150) 改为(128,128)
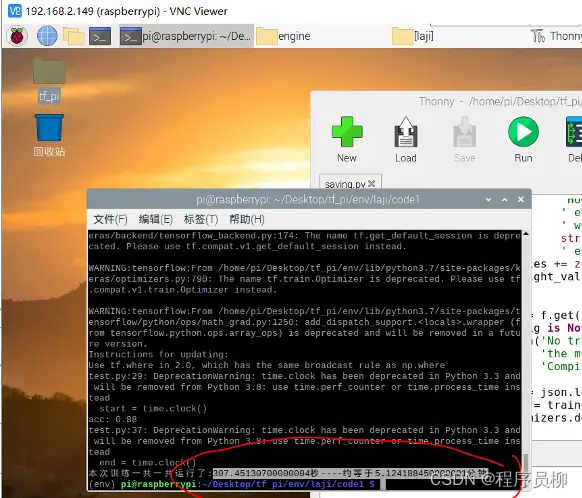
Code1测试结果:test100张玻璃
| 网络 | VGG16 | AlexNet |
|---|---|---|
| 精度 | 89% | 87% |
| 时间 | 307秒 | 80秒 |
Code2测试结果:test100张窗帘(两种,R可回收,O不可回收)
| 网络 | VGG16 | AlexNet |
|---|---|---|
| 精度 | 98% | 98% |
| 时间 | 309秒 | 46秒 |
七、树莓派安装opencv并测试视频接口
系统环境:2020-08-20-raspios-buster-armhf-full
工程要求:opencv 3.4.6.27
cd ~/Desktop/tf_pi
source env/bin/activate
- 1
- 2
- 3
cd ~/Desktop/tf_pi/env/laji/code1
python data1_video_test.py
- 1
- 2
- 3
- 4
- 5
1、安装必要的库
pip3 install numpy sudo apt-get install libhdf5-dev -y build-dep libhdf5-dev sudo apt-get install libatlas-base-dev -y sudo apt-get install libjasper-dev -y sudo apt-get install libqt4-test -y sudo apt-get install libqtgui4 -y sudo apt install libqt4-test pip3 install libqtgui4 sudo apt-get install cmake sudo apt installcmake-qt-gui sudo apt-get install libgtk2.0-dev sudo apt-get install pkg-config pip3 install boost pip3 install dlib

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
2、电脑浏览器下载以下两个文件
https://www.piwheels.org/simple/opencv-contrib-python/opencv_contrib_python-3.4.6.27-cp37-cp37m-linux_armv7l.whl
https://www.piwheels.org/simple/opencv-python/opencv_python-3.4.6.27-cp37-cp37m-linux_armv7l.whl
3、将两个文件拷贝到树莓派上去
4、安装这两个文件,先更新pip
pip install --upgrade pip
pip3 install 文件位置
- 1
- 2
- 3
注意,由于是虚拟环境,就不能做sudo,会安装到默认路径
cd env/bag
pip3 installopencv_contrib_python-3.4.6.27-cp37-cp37m-linux_armv7l.whl
pip3 install opencv_python-3.4.6.27-cp37-cp37m-linux_armv7l.whl
- 1
- 2
- 3
- 4
- 5
5、测试
先打开摄像头设置
sudo raspi-config
- 1
然后运行摄像头程序