- 16.12物联网RK3399项目开发实录-驱动开发之UART 串口的使用(wulianjishu666)
- 2【SSH了解、Git使用和GitCode配置】
- 3热烈庆祝景联文科技北京分公司正式成立!
- 4hadoop集群全部都启动了,但是还是访问不了网页的解决方法_hadoop启动但是打不开网页
- 5提取数据_提取图表曲线数据的方法
- 6关于多副本和纠删码(二)--EC(纠删码)原理_求一份ec纠删码表,3~40节点所支持的所有ec类型,包含m+n,m+n:b。以及每种ec类型支
- 7C++ 小游戏大全_c++游戏
- 8数据库:PostgreSQL 和 MySQL对比_mysql postgresql
- 9Arduino开发 esp32cam+opencv人脸识别距离+语音提醒_esp32 arduino摄像头代码
- 10天龙八部网单服务器装备修改,【图文教程】手把手教你修改游戏称号、武器外观!!!...
pixhawk光流,思码光thone-flow的使用_pixhawk2.4.8 光流传感器
赞
踩
测试硬件:Holybro pixhawk FMU V5
测试固件:V1.13
测试光流:thone-flow
这此从淘宝店家( 玩物励志科技 )购买了迷你光流传感器,也就是图中的思码光光流。价格相比px4flow相差将近十倍!!

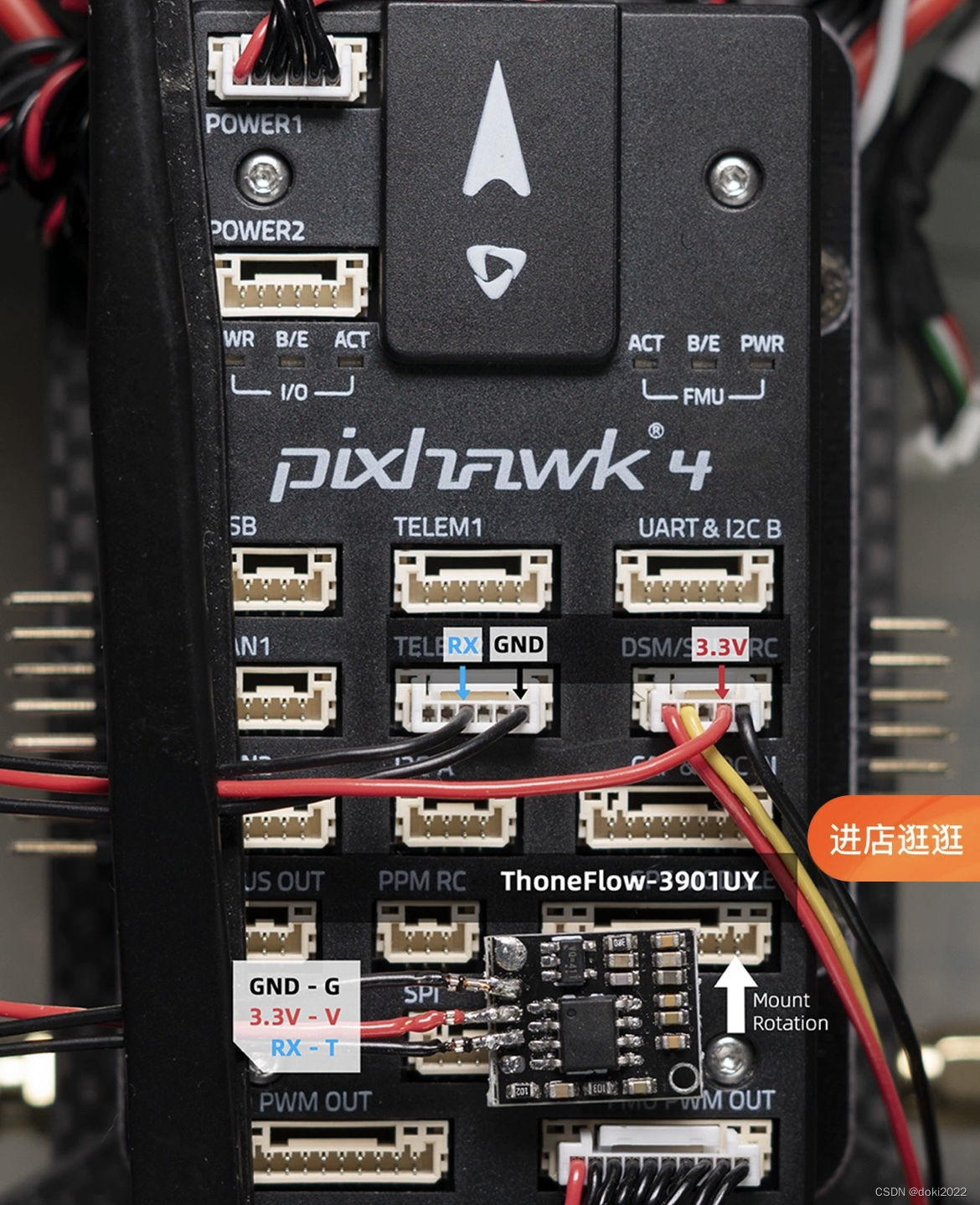
首先思码光光流采用的是pmw3901,且为串口形式发送,我们只需要接vcc、gnd和rx三根线。可以参考一下图片中的接线方式(来自淘宝地面售货站),但该店貌似已经不再经营了,很可惜。
QGC地面站参数设置SENS_EN_PMW3901=1,SENS_TFLOW_CFG=102(如果你插的口是TELEM1,那就设置为101,以此类推)。该板子的唯一一个遗憾便是只能采用3.3v供电,因此接线虽然只有三跟,但需要两个插口,一个用来供电,一个用来传输数据。5v供电会烧!!后续可以考虑加装一个电源模块上去,由5v供电。
1. 如果mavlink消息中还是没有optical_flow消息的话,再把EKF2_AID_MASK设置为仅使用光流,这样应该就有数据了。
2.光流需要搭配测距传感器来使用,看看你是不是测距传感器没有设置好。我这边采用的是TFmini,接线时注意vcc和gnd千万不能接反,多注意。QGC地面站设置EKF2_RNG_AID=1,SENS_EN_TFMINI=enable。这样mavlink消息中便可以看到distance_sensor的数据。
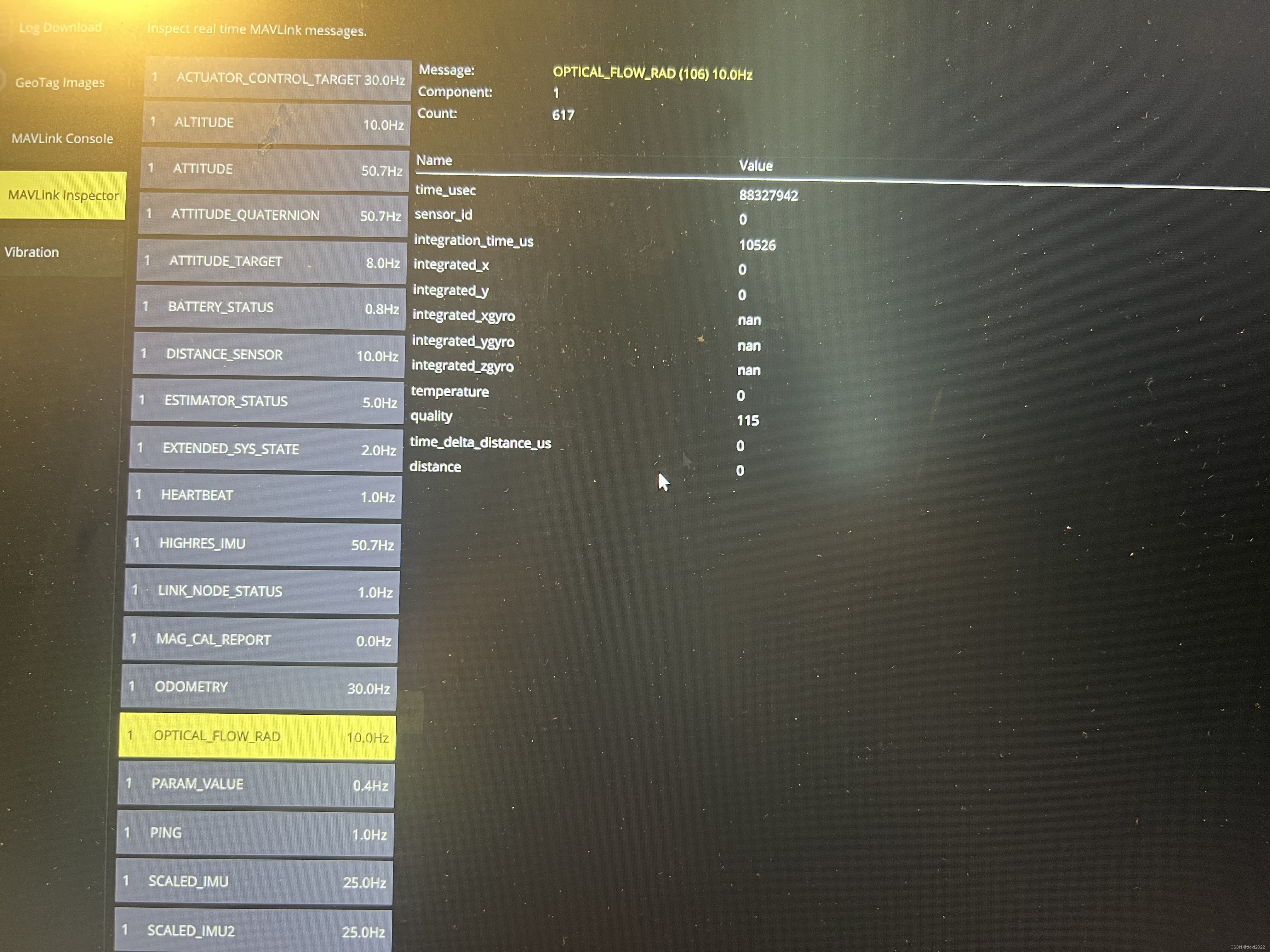
在QGC地面站中tfmini和光流数据如下效果。移动光流,optical_flow中的integrated_x和integrated_y有非零的数据,测试成功!

3.对于安装部分,tfmini直接安装在飞行器底部即可。光流的话,可以看到PMW3901模块上黄色圈出有一个小缺口,这个缺口指示电路板背面的方向。因此红色箭头指向飞行器正前方,也就是光流的安装方向,镜头对地,缺口对后方。

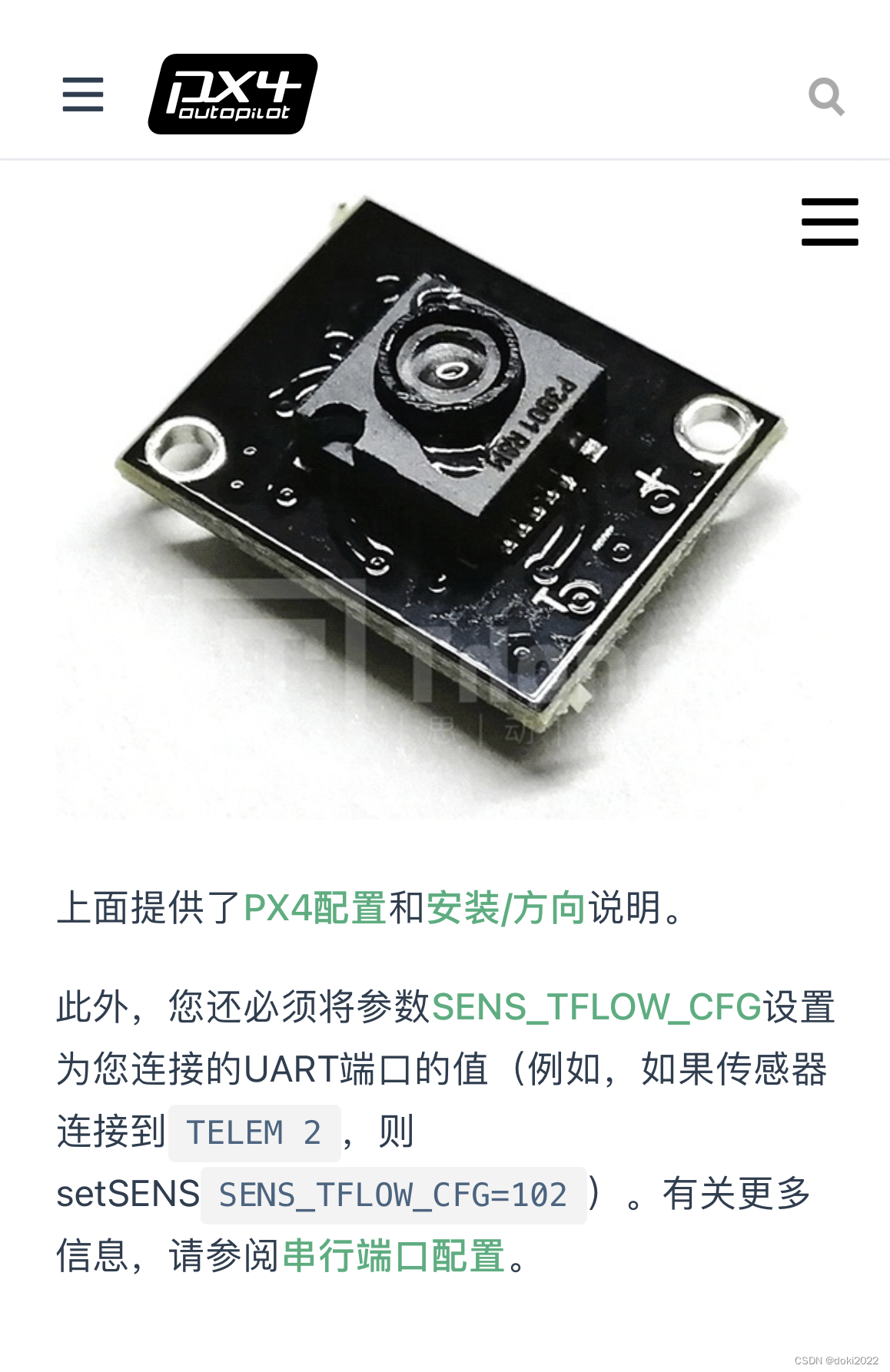
px4的官网对此也有说明,翻译后内容如下。如果光流计并不安装在正中心,可以QGC地面站更改SENS_FLOW_ROT参数设置值。

2022.9.6更新
wifi数传的使用
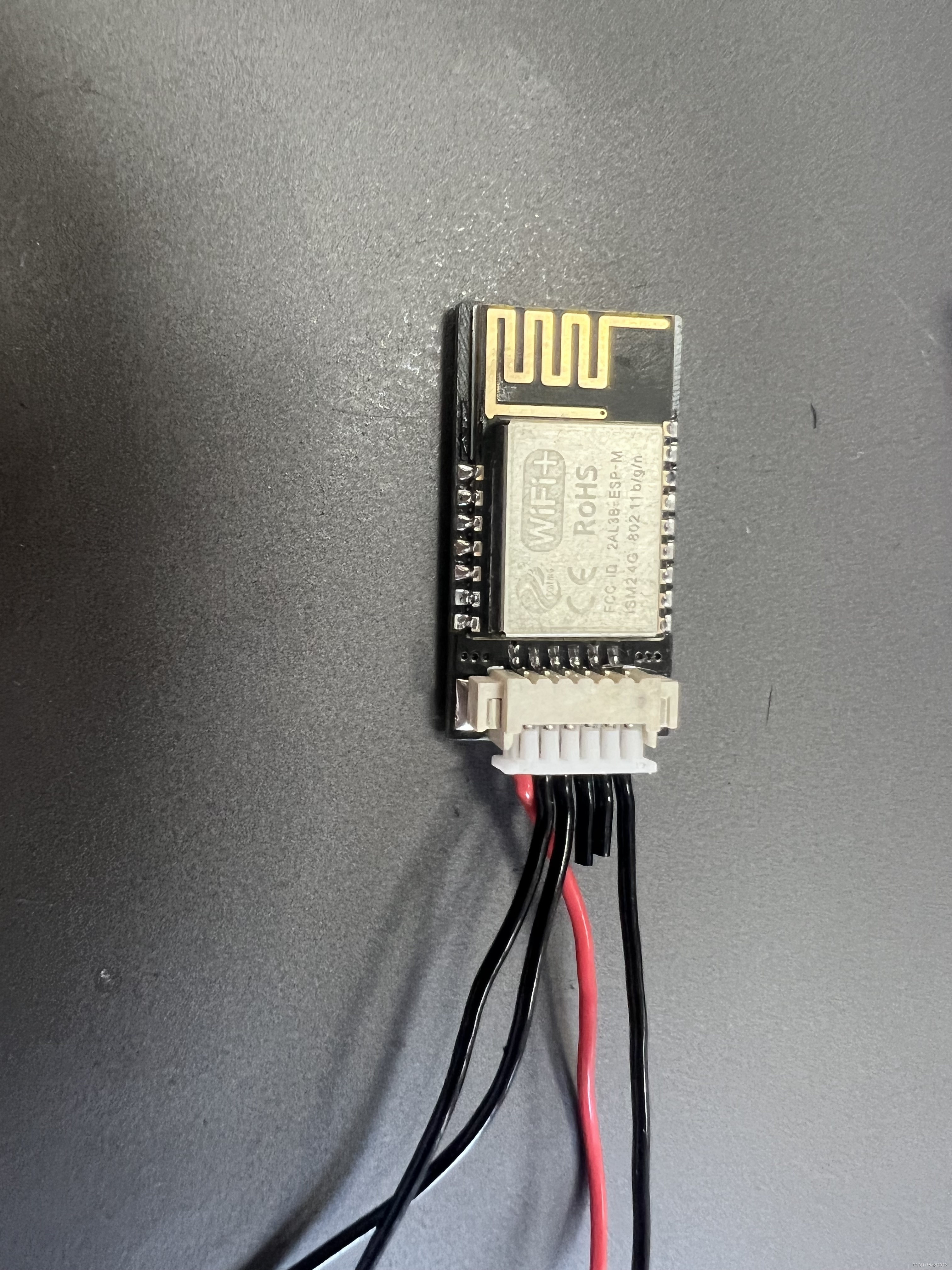
购买的是ESP8266 wifi数传,因为懒得自己搞了多花了三十多块钱直接买了现成的,图片如下。当然也可以自己做一个,我感觉应该不难,烧个固件好像就可以。csdn教程也很多。
pixhawk4线材包中有现成的线,确认了vcc gnd直接连就ok了,这个线tx-rx,rx-tx这些都是对的,不要向我一样碰到个不懂的客服在那瞎指挥。
然后按照客服的教程,给这个模块上电后,会有一个wifi信号,电脑连上wifi信号。再QGC地面站--通讯连接部分选择UDP通信,点下面的连接,一般一两秒就能ok
连上没反应的话:
1:传统的按照客服所说,关闭防火墙之类的,可以试试,我这边依旧不行。
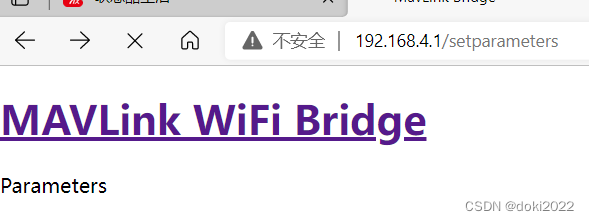
2:连上这个模块的wifi后,打开浏览器,输入192.168.4.1,点击set up。注意看一下这个的波特率。我买的这个应该适配的是pixhawk 2.4.6-2.4.8,并不是pixhawk4。里面设置的波特率是57600,而pixhawk4默认串口的波特率是921600。看下一步。
3:进入QGC参数部分改,MAV_1_CONFIG=TELEM4,重启飞控,搜索参数ser_.....,可以看到一个什么ser-telem1-bud(名字不记得了),这个波特率改成57600.重启飞控。改用电池供电,断开usb线。wifi模块插telem2口。然后老一套点连接,应该就成功了,选择自动连接的话,只要电脑连上模块的wifi,打开qgc直接就是wifi数传的界面。
2022年10月11日更新
正点原子pmw3901的使用 淘宝价格120左右 4m版本
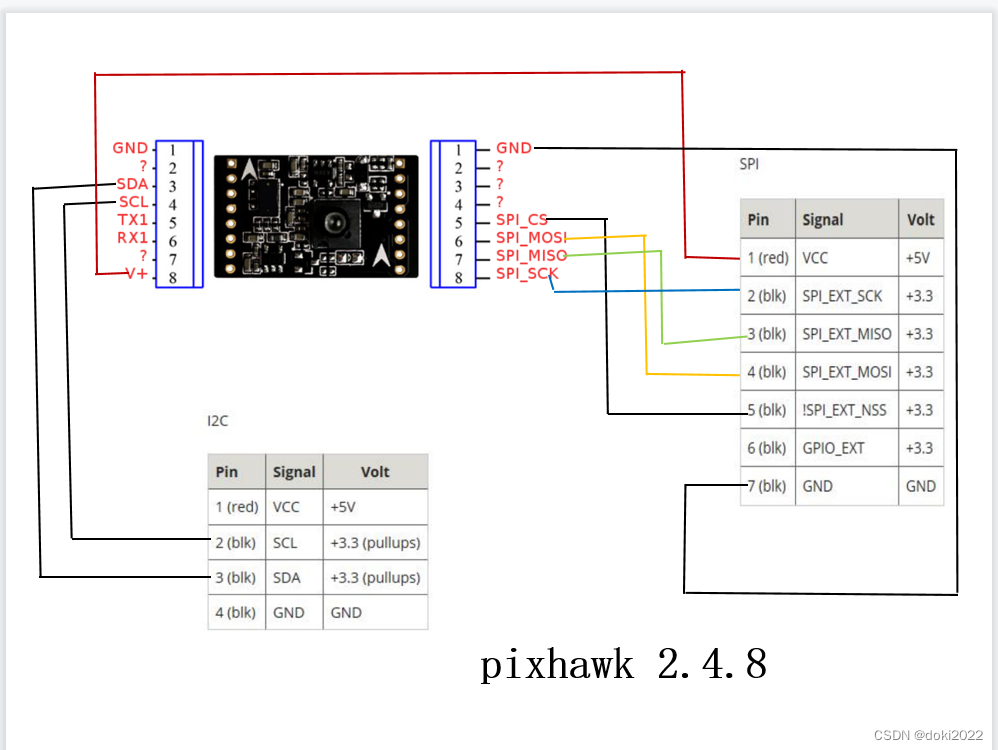
官网也有这个光流的资料,参数部分别的按照官网来,多修改一个参数:sens_flow_roation=0就行,不修改的话,飞机会朝着斜前方飞,根本定不住。接线提供接线图如下(pixhawk 2.4.6/2.4.8),px4接线spi接口部分按照官网来,iic只需sda和scl部分就行。