
热门标签
当前位置: article > 正文
虚拟仿真测试介绍(9):硬件在环(HIL)测试简介
作者:小蓝xlanll | 2024-05-29 22:43:42
赞
踩
硬件在环
- 如果方便,请帮忙分享、喜欢和收藏 ,谢谢!
“关于硬件在环HIL测试的简单介绍,供大家批评。”
01 是什么
硬件在环hardware-in-the-loop,简称HIL,大家可能经常听到,那这到底是什么呢?可以说是一种对控制器进行测试的手段,而其名字已经揭示了含义。名字中的“hardware”硬件,即是这个测试手段的被测对象,一般是控制器实物,比如整车控制器VCU、电池管理系统BMS、ADAS控制器或者是自动驾驶的计算平台;“in-the-loop”在环,强调了被测控制器要在一个闭合的回路里,这个回路即是控制器接收被控对象的状态并发出控制指令,然后得到被控对象反馈并再次发出控制指令的过程。形成了这个测试闭环,就可通过设置被测对象不同的状态,来测试控制器能否对不同的工况进行正确处理,其功能是否都能够正常工作。
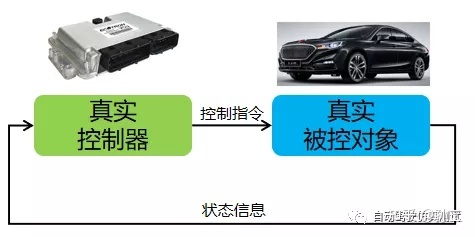
那么如何形成这个测试闭环呢?我们从真实控制器和真实被控对象的情况说起。比如真实的自动驾驶控制器控制真实车辆时,控制器发送控制指令(如加速、减速、转向等)给车辆上的执行器,车辆根据控制指令做出相应的动作,然后车辆上安装的传感器检测状态信息(如车速、横摆角、障碍物信息等),并反馈给控制器,控制器继续根据新的状态信息计算并发出控制指令,周而复始。
进行HIL测试时,使用HIL设备替代真实被控对象,接收所有控制指令,并模拟所有状态信息返回给真实控制器,使控制器以为自己在控制真实对象,从而形成测试闭环。

这要求HIL设备一方面能够按照真实被控对象和控制器接口的线路形式和协议收发信息,另一方面能够对控制指令做出正确响应并发出正确的状态值。从而,HIL设备一般由这样几部分构成:
(1)被控对象仿真模型ÿ
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/644259
推荐阅读
相关标签

