
热门标签
热门文章
- 1Nginx快速入门:nginx实现正向代理|反向代理和正向代理的区别(八)_nginx 正向代理
- 2FISCOBCOS 控制台全部命令_fiscobcos官方文档
- 3windows环境下搭建kafka_kafka-topics.bat 无法执行
- 4排列特征重要性_深度学习排列特征重要性
- 5java: 找不到符号或者包 (eg.程序包org.neo4j.ogm.annotation不存在)_org.neo4j.ogm没有引入
- 6单片机设计基于STM32的心率检测仪设计与实现_基于单片机的心率检测仪设计
- 7流式计算的代表:Storm、Flink、SparkStreaming_storm spark-streaming flink
- 8谈谈前端大厂面经:字节跳动三面,竟一次性过,前端开发社招面试总结_字节前端三面
- 9【OpenCV • c++】图像几何变换 | 图像缩放_c++ opencv 图片缩放
- 10项目接入星火认知大模型!!!_vue 对接 科大讯飞星火认知大模型
当前位置: article > 正文
机器学习——卷积神经网络
作者:小蓝xlanll | 2024-06-13 16:52:53
赞
踩
机器学习——卷积神经网络
卷积神经网络CNN
多层感知机MLP的层数足够,理论上可以用其提取出二位特征,但是毕竟复杂,卷积神经网络就可以更合适的来提取高维的特征。
而卷积其实是一种运算
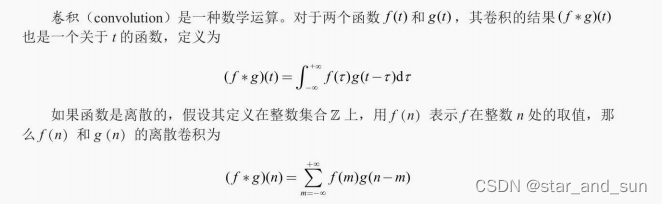
二维离散卷积的公式

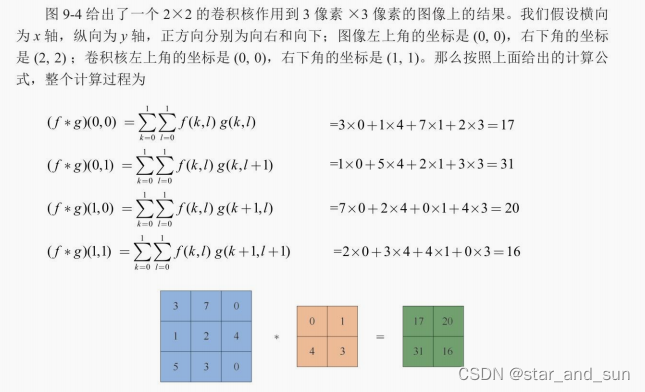
可以看成g是一个图像的像素点,f是每个像素点对应的权重,权重越大,重要程度越大,这里的权重f可以根据梯度反向传播的方式训练
在CNN中进行卷积运算的层称为卷积层,层中的权重f被称为卷积核。
如果将f进行翻转,得到的参数在位置上是翻转的,对参数数值没有影响。这样的运算称为互相关。
卷积的运算例子
用卷积神经网络完成图像分类任务
class CNN(nn.Module): def __init__(self, num_classes=10): super().__init__() # 类别数目 self.num_classes = num_classes # Conv2D为二维卷积层,参数依次为 # in_channels:输入通道 # out_channels:输出通道,即卷积核个数 # kernel_size:卷积核大小,默认为正方形 # padding:填充层数,padding=1表示对输入四周各填充一层,默认填充0 self.conv1 = nn.Conv2d(in_channels=3, out_channels=32, kernel_size=3, padding=1) # 第二层卷积,输入通道与上一层的输出通道保持一致 self.conv2 = nn.Conv2d(32, 32, 3, padding=1) # 最大池化,kernel_size表示窗口大小,默认为正方形 self.pooling1 = nn.MaxPool2d(kernel_size=2) # 丢弃层,p表示每个位置被置为0的概率 # 随机丢弃只在训练时开启,在测试时应当关闭 self.dropout1 = nn.Dropout(p=0.25) self.conv3 = nn.Conv2d(32, 64, 3, padding=1) self.conv4 = nn.Conv2d(64, 64, 3, padding=1) self.pooling2 = nn.MaxPool2d(2) self.dropout2 = nn.Dropout(0.25) # 全连接层,输入维度4096=64*8*8,与上一层的输出一致 self.fc1 = nn.Linear(4096, 512) self.dropout3 = nn.Dropout(0.5) self.fc2 = nn.Linear(512, num_classes) # 前向传播,将输入按顺序依次通过设置好的层 def forward(self, x): x = F.relu(self.conv1(x)) x = F.relu(self.conv2(x)) x = self.pooling1(x) x = self.dropout1(x) x = F.relu(self.conv3(x)) x = F.relu(self.conv4(x)) x = self.pooling2(x) x = self.dropout2(x) # 全连接层之前,将x的形状转为 (batch_size, n) x = x.view(len(x), -1) x = F.relu(self.fc1(x)) x = self.dropout3(x) x = self.fc2(x) return x #%% batch_size = 64 # 批量大小 learning_rate = 1e-3 # 学习率 epochs = 5 # 训练轮数 np.random.seed(0) torch.manual_seed(0) # 批量生成器 trainloader = DataLoader(trainset, batch_size=batch_size, shuffle=True) testloader = DataLoader(testset, batch_size=batch_size, shuffle=False) model = CNN() # 使用Adam优化器 optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate) # 使用交叉熵损失 criterion = F.cross_entropy # 开始训练 for epoch in range(epochs): losses = 0 accs = 0 num = 0 model.train() # 将模型设置为训练模式,开启dropout with tqdm(trainloader) as pbar: for data in pbar: images, labels = data outputs = model(images) # 获取输出 loss = criterion(outputs, labels) # 计算损失 # 优化 optimizer.zero_grad() loss.backward() optimizer.step() # 累积损失 num += len(labels) losses += loss.detach().numpy() * len(labels) # 精确度 accs += (torch.argmax(outputs, dim=-1) \ == labels).sum().detach().numpy() pbar.set_postfix({ 'Epoch': epoch, 'Train loss': f'{losses / num:.3f}', 'Train acc': f'{accs / num:.3f}' }) # 计算模型在测试集上的表现 losses = 0 accs = 0 num = 0 model.eval() # 将模型设置为评估模式,关闭dropout with tqdm(testloader) as pbar: for data in pbar: images, labels = data outputs = model(images) loss = criterion(outputs, labels) num += len(labels) losses += loss.detach().numpy() * len(labels) accs += (torch.argmax(outputs, dim=-1) \ == labels).sum().detach().numpy() pbar.set_postfix({ 'Epoch': epoch, 'Test loss': f'{losses / num:.3f}', 'Test acc': f'{accs / num:.3f}' })

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
# 该工具包中有AlexNet、VGG等多种训练好的CNN网络 from torchvision import models import copy # 定义图像处理方法 transform = transforms.Resize([512, 512]) # 规整图像形状 def loadimg(path): # 加载路径为path的图像,形状为H*W*C img = plt.imread(path) # 处理图像,注意重排维度使通道维在最前 img = transform(torch.tensor(img).permute(2, 0, 1)) # 展示图像 plt.imshow(img.permute(1, 2, 0).numpy()) plt.show() # 添加batch size维度 img = img.unsqueeze(0).to(dtype=torch.float32) img /= 255 # 将其值从0-255的整数转换为0-1的浮点数 return img content_image_path = os.path.join('style_transfer', 'content', '04.jpg') style_image_path = os.path.join('style_transfer', 'style.jpg') # 加载内容图像 print('内容图像') content_img = loadimg(content_image_path) # 加载风格图像 print('风格图像') style_img = loadimg(style_image_path)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/713853
推荐阅读
相关标签

