
热门标签
热门文章
- 1C# message简单实现窗口间信息接收与发送_c# wm_user 消息为空
- 2【数据结构】数据结构初识
- 3微信小程序授权登录三种实现方式
- 4微信小程序入门05-用户登录注册接口开发_微信小程序实现注册登录到数据库
- 5Python pywinauto+lackey实现自动安装软件_lackey python
- 6Docker容器的可视化管理工具—DockerUI本地部署与远程访问
- 7[翻译] Unity 开发自学路线_unity 学习路线
- 8关于“Python”的核心知识点整理大全45
- 9使用cdn提高Github Pages的访问速度_github cdn
- 10解决Microsoft Visual C++ 14.0 or greater is required. Get it with “Microsoft C++ Build Tools“_error: microsoft visual c++ 14.0 or greater is req
当前位置: article > 正文
机械臂学习——舵机的速度控制、坐标变换、DH模型、正运动学解、逆运动学解_舵机速度可以调节吗
作者:小蓝xlanll | 2024-02-16 21:16:58
赞
踩
舵机速度可以调节吗
机械臂学习

前言


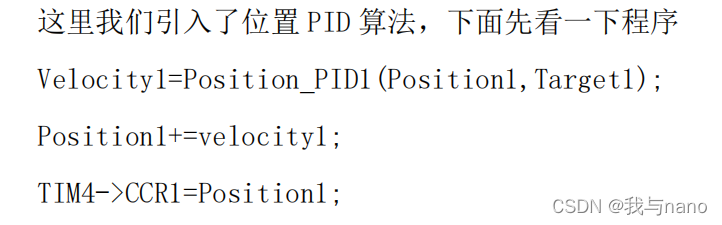
一、舵机的速度控制
1.舵机概述
工作电压:4.8v-6v
舵机的驱动是比较容易的,当我们使用单片机控制的时候,通过输出50HZ(20ms的周期)的PWM,控制PWM脉宽调节舵机的转角。舵机的转角与脉宽(高电平时间)存在一一对应关系,如果控制舵机转到某一角度,就改变输出脉宽即可,比如从1ms到1.5ms。那么如何进行舵机的速度控制呢?
2.代码实现
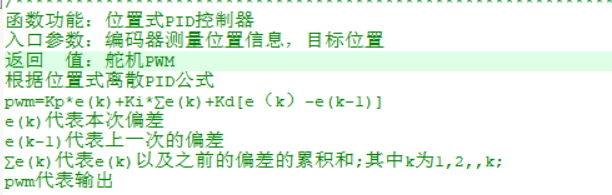
float Position_PID1 (float Encoder,float Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Target-Encoder; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Position_KP*Bias/100+Position_KI*Integral_bias/100+Position_KD*(Bias-Last_Bias)/100; //位置PID控制器
Last_Bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
P=5、I=0、D=2
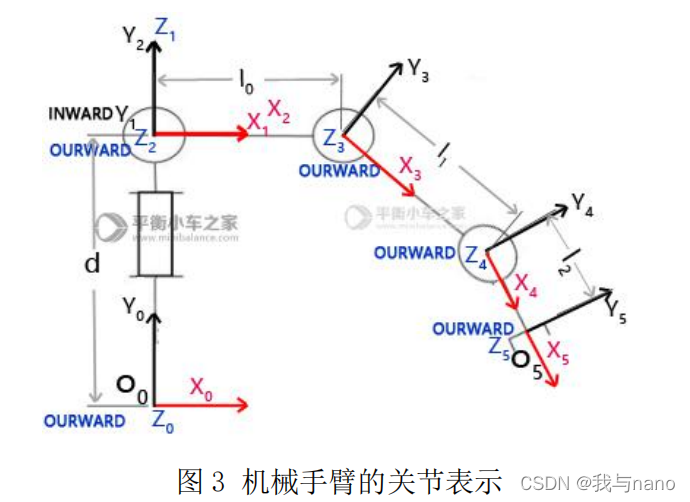
二、机械臂的坐标变换
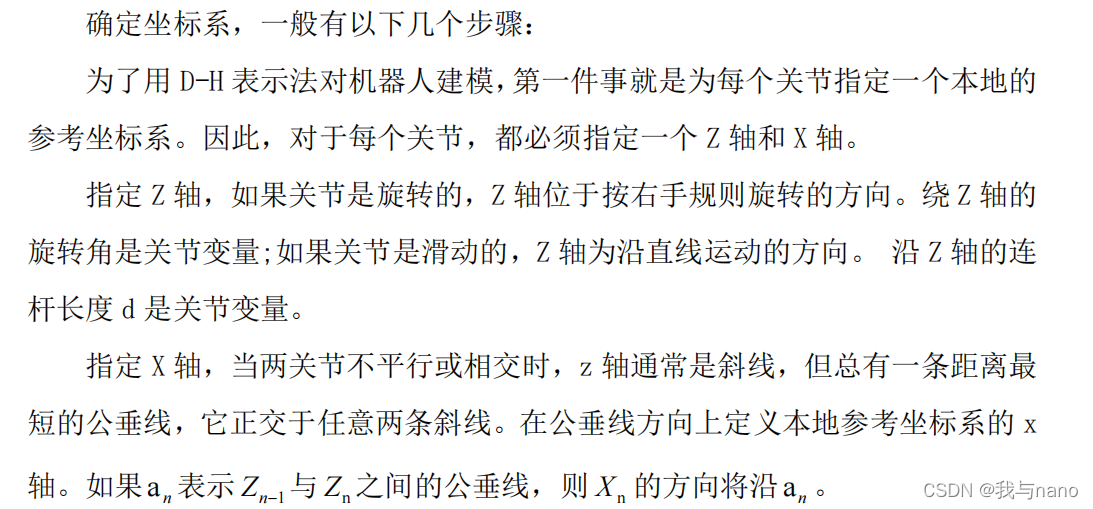
1.坐标变换
坐标系是根据DH法建立的
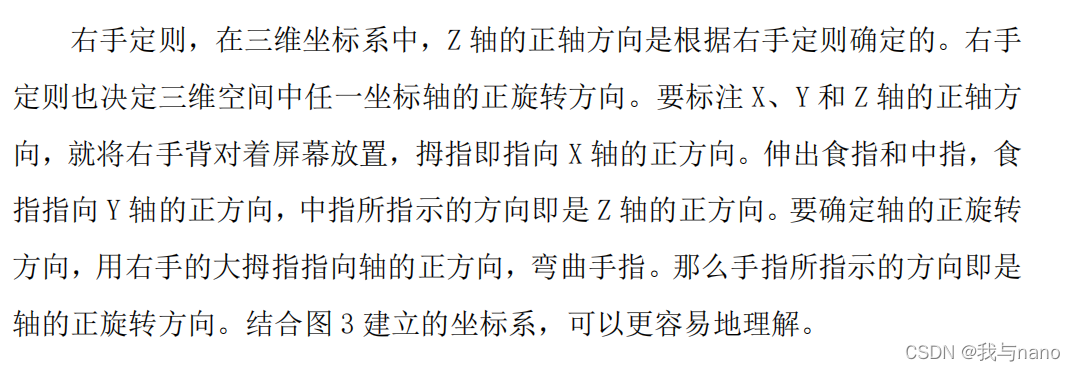
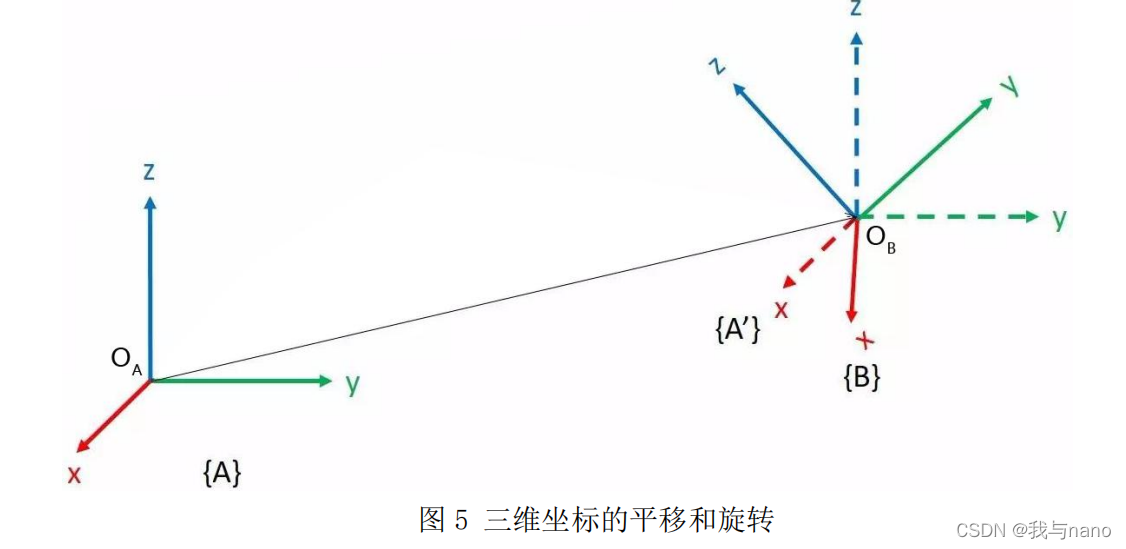
2.坐标的几何概述
单位向量——模等于1的向量。由于是非零向量,单位向量具有确定的方向。
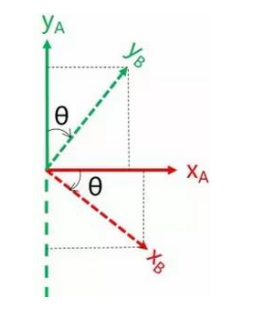
由坐标系OXaYa绕Z轴旋转得到新的坐标系OXbYb
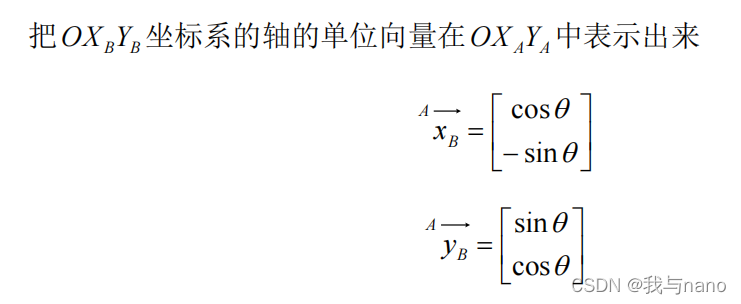

如果三维连续旋转变换就会复制很多,当然神奇的DH模型会解决这些问题。

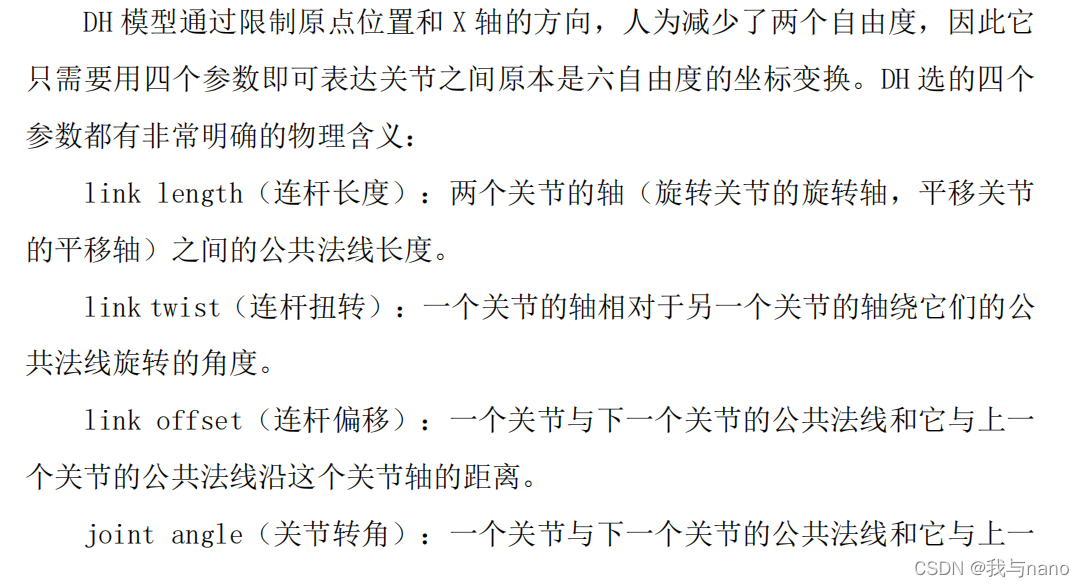
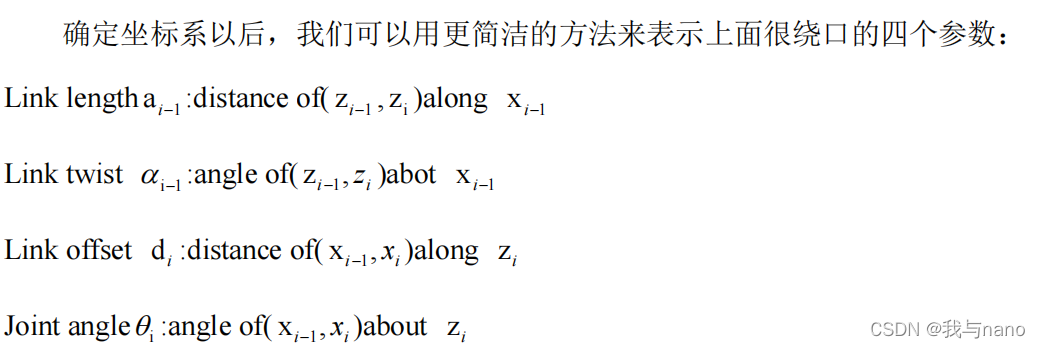
三、DH模型和正运动学解



给每个关节都附上单独的坐标系之后:
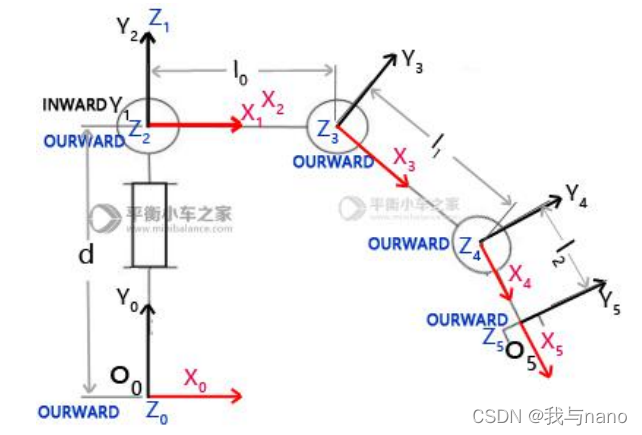
机械臂DH参数表:

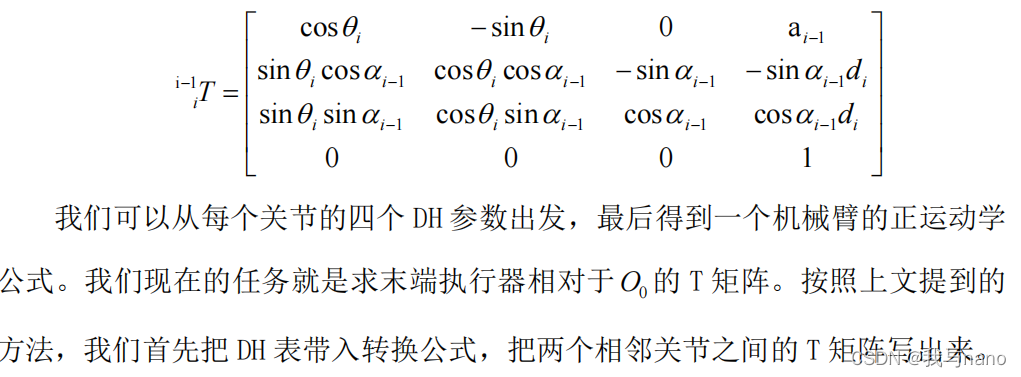
正运动学解并不能在单片机上执行,所以我们需要逆运动学几何法来在单片机上运行。
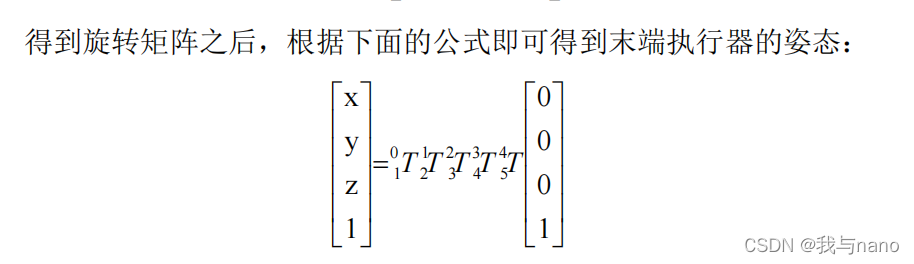
四、逆运动学解

1.逆运动学几何法

方程:



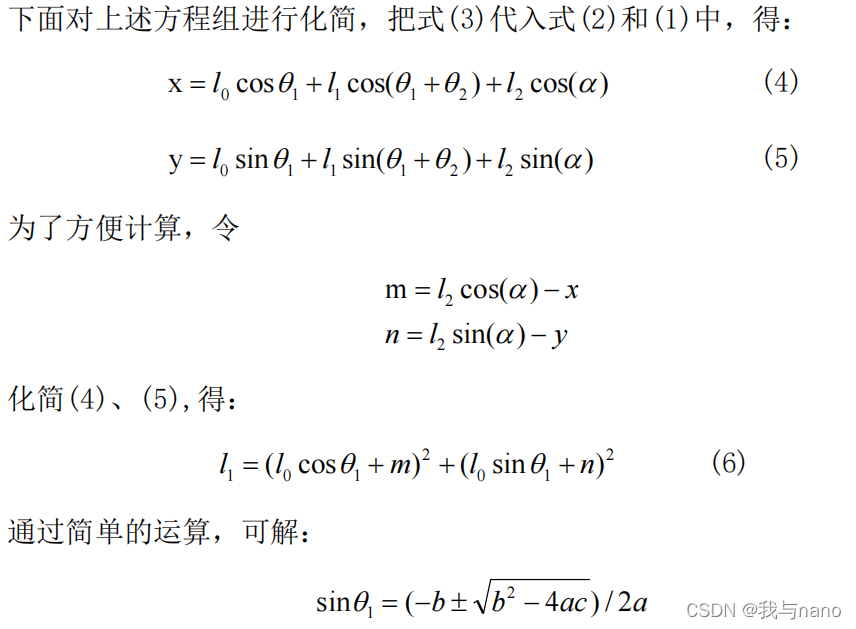
这样就完成了逆运动学的计算。
2.代码实现
void Kinematic_Analysis(float x,float y,float Beta,float Alpha) { float m,n,k,a,b,c,theta1,theta2,theta3,s1ps2; m=l2*cos(Alpha)-x; n=l2*sin(Alpha)-y; k=(l1*l1-l0*l0-m*m-n*n)/2/l0; a=m*m+n*n; b=-2*n*k; c=k*k-m*m; theta1=(-b+sqrt(b*b-4*a*c))/2/a; theta1=asin(theta1)*180/PI; if(theta1>90) theta1=90; if(theta1<-90) theta1=-90; k=(l0*l0-l1*l1-m*m-n*n)/2/l1; a=m*m+n*n; b=-2*n*k; c=k*k-m*m; s1ps2=(-b-sqrt(b*b-4*a*c))/2/a; s1ps2=asin(s1ps2)*180/PI; if(s1ps2>90) theta2=90; if(s1ps2<-90) theta2=-90; theta2=s1ps2-theta1; if(theta2>90) theta2=90; if(theta2<-90) theta2=-90; theta3=Alpha*180/PI-theta1-theta2; if(theta3>90) theta3=90; if(theta3<-90) theta3=-90; Target1 = 750-(Beta)*Ratio; Target2 = 735+(theta1-90)*Ratio; Target3 = 717-(theta2)*Ratio; Target4 = 702-(theta3)*Ratio;; Target5 = 750; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/96745
推荐阅读
相关标签

