
- 1BeautifulSoup4的使用_beautifulsoup4 java
- 2ctfshow2024元旦杯web_ctfshow easy_include
- 3【unity3D】TileMap基础知识(详细版)_unity tilemap
- 4一键AI智能改写文章,提高文章写作效率
- 5每日五道java面试题之spring篇(三)
- 6FL Studio 21.1.0官方中文破解版下载安装激活教程重磅发布含注册机
- 7台积电工业网络安全事件概述与解决方案
- 8单词接龙C++_c++单词接龙
- 9数据恢复关键技术与实战指南
- 10使用Mybatis Log plugin没有生效问题解决办法_mybatis log free插件不生效
服务器远程使用什么协议,从 0 到 1:全面理解 RPC 远程调用!
赞
踩
原标题:从 0 到 1:全面理解 RPC 远程调用!

作者 | Python编程时光
责编 | 胡巍巍
什么是RPC呢?百度百科给出的解释是这样的:“RPC(Remote Procedure Call Protocol)——远程过程调用协议,它是一种通过网络从远程计算机程序上请求服务,而不需要了解底层网络技术的协议”。
这个概念听起来还是比较抽象,没关系,继续往后看,后面概念性的东西,我会讲得足够清楚,让你完全掌握 RPC 的基础内容。
既 REST ,何 RPC ?
在 OpenStack 里的进程间通信方式主要有两种,一种是基于HTTP协议的RESTFul API方式,另一种则是RPC调用。
那么这两种方式在应用场景上有何区别呢?
前者(RESTful)主要用于各组件之间的通信(如nova与glance的通信),或者说用于组件对外提供调用接口
而后者(RPC)则用于同一组件中各个不同模块之间的通信(如nova组件中nova-compute与nova-scheduler的通信)。
首先,给你提两个问题,带着这两个问题再往下看:
1、RPC 和 REST 区别是什么?
2、为什么要采用RPC呢?
首先,第一个问题:RPC 和 REST 区别是什么?
你一定会觉得这个问题很奇怪,是的,包括我,但是你在网络上一搜,会发现类似对比的文章比比皆是,我在想可能很多初学者由于基础不牢固,才会将不相干的二者拿出来对比吧。既然是这样,那为了让你更加了解陌生的RPC,就从你熟悉得不能再熟悉的 REST 入手吧。
01、所属类别不同
REST,是Representational State Transfer 的简写,中文描述表述性状态传递(是指某个瞬间状态的资源数据的快照,包括资源数据的内容、表述格式(XML、JSON)等信息。)
REST 是一种软件架构风格。这种风格的典型应用,就是HTTP。其因为简单、扩展性强的特点而广受开发者的青睐。
而RPC 呢,是 Remote Procedure Call Protocol 的简写,中文描述是远程过程调用,它可以实现客户端像调用本地服务(方法)一样调用服务器的服务(方法)。
而 RPC 可以基于 TCP/UDP,也可以基于 HTTP 协议进行传输的,按理说它和REST不是一个层面意义上的东西,不应该放在一起讨论,但是谁让REST这么流行呢,它是目前最流行的一套互联网应用程序的API设计标准,某种意义下,我们说 REST 可以其实就是指代 HTTP 协议。
02、使用方式不同
从使用上来看,HTTP 接口只关注服务提供方,对于客户端怎么调用并不关心。接口只要保证有客户端调用时,返回对应的数据就行了。而RPC则要求客户端接口保持和服务端的一致。
REST 是服务端把方法写好,客户端并不知道具体方法。客户端只想获取资源,所以发起HTTP请求,而服务端接收到请求后根据URI经过一系列的路由才定位到方法上面去
RPC是服务端提供好方法给客户端调用,客户端需要知道服务端的具体类,具体方法,然后像调用本地方法一样直接调用它。
03、面向对象不同
从设计上来看,RPC,所谓的远程过程调用 ,是面向方法的 ,REST:所谓的 Representational state transfer ,是面向资源的,除此之外,还有一种叫做 SOA,所谓的面向服务的架构,它是面向消息的,这个接触不多,就不多说了。
04、序列化协议不同
接口调用通常包含两个部分,序列化和通信协议。
通信协议,上面已经提及了,REST 是 基于 HTTP 协议,而 RPC 可以基于 TCP/UDP,也可以基于 HTTP 协议进行传输的。
常见的序列化协议,有:json、xml、hession、protobuf、thrift、text、bytes等,REST 通常使用的是 JSON或者XML,而 RPC 使用的是 JSON-RPC,或者 XML-RPC。
通过以上几点,我们知道了 REST 和 RPC 之间有很明显的差异。
然后第二个问题:为什么要采用RPC呢?
那到底为何要使用 RPC,单纯的依靠RESTful API不可以吗?为什么要搞这么多复杂的协议,渣渣表示真的学不过来了。
关于这一点,以下几点仅是我的个人猜想,仅供交流哈:
RPC 和 REST 两者的定位不同,REST 面向资源,更注重接口的规范,因为要保证通用性更强,所以对外最好通过 REST。而 RPC 面向方法,主要用于函数方法的调用,可以适合更复杂通信需求的场景。
RESTful API客户端与服务端之间采用的是同步机制,当发送HTTP请求时,客户端需要等待服务端的响应。当然对于这一点是可以通过一些技术来实现异步的机制的。
采用RESTful API,客户端与服务端之间虽然可以独立开发,但还是存在耦合。比如,客户端在发送请求的时,必须知道服务器的地址,且必须保证服务器正常工作。而 rpc + ralbbimq中间件可以实现低耦合的分布式集群架构。
说了这么多,我们该如何选择这两者呢?我总结了如下两点,供你参考:
REST 接口更加规范,通用适配性要求高,建议对外的接口都统一成 REST。而组件内部的各个模块,可以选择 RPC,一个是不用耗费太多精力去开发和维护多套的HTTP接口,一个RPC的调用性能更高(见下条)
从性能角度看,由于HTTP本身提供了丰富的状态功能与扩展功能,但也正由于HTTP提供的功能过多,导致在网络传输时,需要携带的信息更多,从性能角度上讲,较为低效。而RPC服务网络传输上仅传输与业务内容相关的数据,传输数据更小,性能更高。
“远程调用”意思就是:被调用方法的具体实现不在程序运行本地,而是在别的某个地方(分布到各个服务器),调用者只想要函数运算的结果,却不需要实现函数的具体细节。
光说不练嘴把式,接下来,我将分别用三种不同的方式全面地让你搞明白 rpc 远程调用是如何实现的。
01、基于 xml-rpc
Python实现 rpc,可以使用标准库里的 SimpleXMLRPCServer,它是基于XML-RPC 协议的。
有了这个模块,开启一个 rpc server,就变得相当简单了。执行以下代码:
import SimpleXMLRPCServer
classcalculate:
defadd(self, x, y):
returnx + y
defmultiply(self, x, y):
returnx * y
defsubtract(self, x, y):
returnabs(x-y)
defdivide(self, x, y):
returnx/y
obj = calculate
server = SimpleXMLRPCServer.SimpleXMLRPCServer(("localhost", 8088))
# 将实例注册给rpc server
server.register_instance(obj)
print "Listening on port 8088"
server.serve_forever
有了 rpc server,接下来就是 rpc client,由于我们上面使用的是 XML-RPC,所以 rpc clinet 需要使用xmlrpclib 这个库。
import xmlrpclib
server = xmlrpclib.ServerProxy("http://localhost:8088")
然后,我们通过 server_proxy 对象就可以远程调用之前的rpc server的函数了。
>>server.add(2, 3)
5
>>> server.multiply(2, 3)
6
>>> server.subtract(2, 3)
1
>>> server.divide(2, 3)
0
SimpleXMLRPCServer是一个单线程的服务器。这意味着,如果几个客户端同时发出多个请求,其它的请求就必须等待第一个请求完成以后才能继续。
若非要使用 SimpleXMLRPCServer 实现多线程并发,其实也不难。只要将代码改成如下即可。
fromSimpleXMLRPCServer importSimpleXMLRPCServer
fromSocketServer importThreadingMixIn
classThreadXMLRPCServer(ThreadingMixIn, SimpleXMLRPCServer):pass
classMyObject:
defhello(self):
return"hello xmlprc"
obj = MyObject
server = ThreadXMLRPCServer(("localhost", 8088), allow_none=True)
server.register_instance(obj)
print"Listening on port 8088"
server.serve_forever
02、基于json-rpc
SimpleXMLRPCServer 是基于 xml-rpc 实现的远程调用,上面我们也提到 除了 xml-rpc 之外,还有 json-rpc 协议。
那 python 如何实现基于 json-rpc 协议呢?
答案是很多,很多web框架其自身都自己实现了json-rpc,但我们要独立这些框架之外,要寻求一种较为干净的解决方案,我查找到的选择有两种
第一种是 jsonrpclib
pipinstall jsonrpclib -i https://pypi.douban.com/simple
第二种是 python-jsonrpc
pipinstall python-jsonrpc -i https://pypi.douban.com/simple
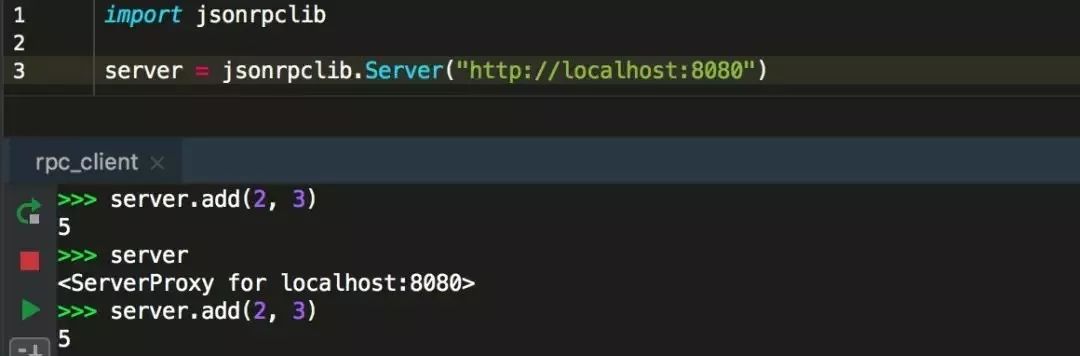
先来看第一种 jsonrpclib
它与 Python 标准库的 SimpleXMLRPCServer 很类似(因为它的类名就叫做 SimpleJSONRPCServer ,不明真相的人真以为它们是亲兄弟)。或许可以说,jsonrpclib 就是仿照 SimpleXMLRPCServer 标准库来进行编写的。
它的导入与 SimpleXMLRPCServer 略有不同,因为SimpleJSONRPCServer分布在jsonrpclib库中。
服务端
fromjsonrpclib.SimpleJSONRPCServer importSimpleJSONRPCServer
server = SimpleJSONRPCServer(('localhost', 8080))
server.register_function(lambdax,y: x+y, 'add')
server.serve_forever
客户端
import jsonrpclib
server = jsonrpclib.Server("http://localhost:8080")
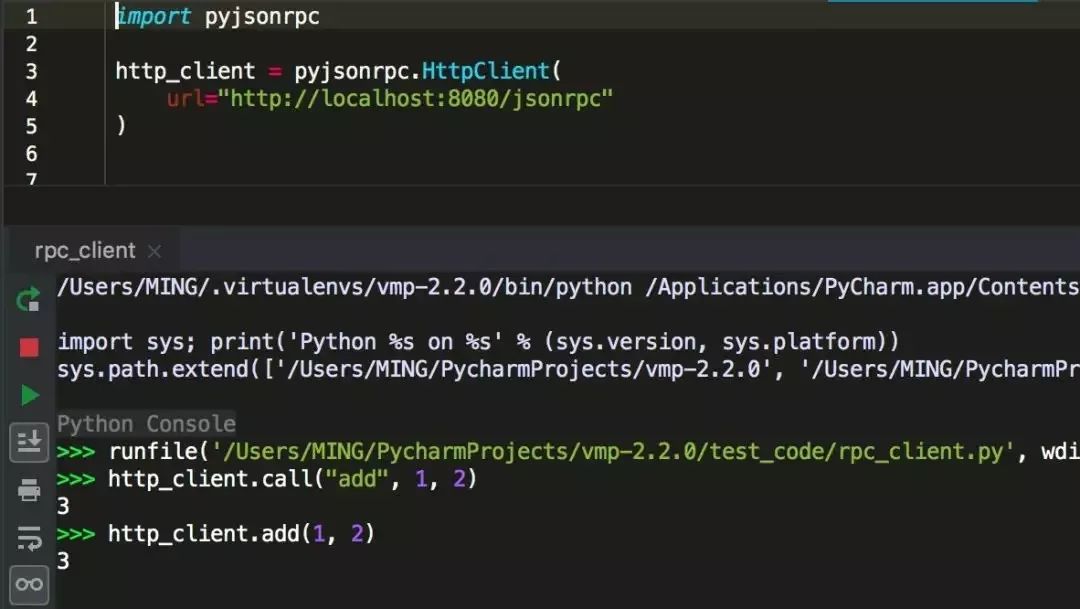
再来看第二种python-jsonrpc,写起来貌似有些复杂。
服务端
importpyjsonrpc
classRequestHandler(pyjsonrpc.HttpRequestHandler):
@pyjsonrpc.rpcmethod
defadd(self, a, b):
"""Test method"""
returna + b
http_server = pyjsonrpc.ThreadingHttpServer(
server_address=('localhost', 8080),
RequestHandlerClass=RequestHandler
)
print"Starting HTTP server ..."
print"URL: http://localhost:8080"
http_server.serve_forever
客户端
import pyjsonrpc
http_client = pyjsonrpc.HttpClient(
url="http://localhost:8080/jsonrpc"
)
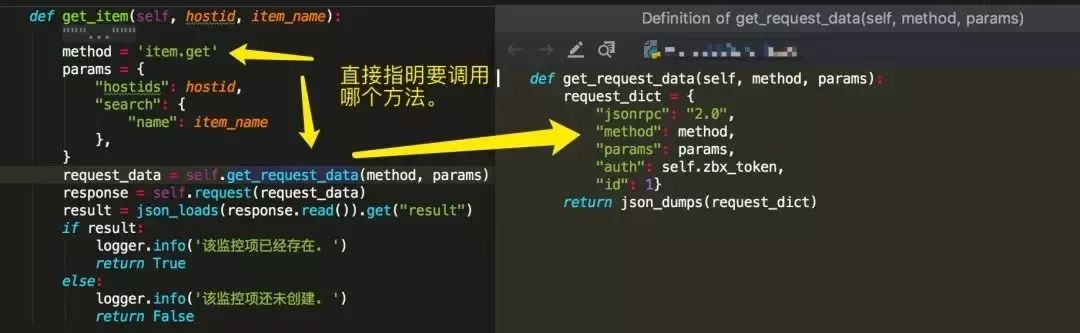
还记得上面我提到过的 zabbix API,因为我有接触过,所以也拎出来讲讲。zabbix API 也是基于 json-rpc 2.0协议实现的。
因为内容较多,这里只带大家打个,zabbix 是如何调用的:直接指明要调用 zabbix server 的哪个方法,要传给这个方法的参数有哪些。
03、基于 zerorpc
以上介绍的两种rpc远程调用方式,如果你足够细心,可以发现他们都是http+rpc 两种协议结合实现的。
接下来,我们要介绍的这种(zerorpc),就不再使用走 http 了。
zerorpc 这个第三方库,它是基于TCP协议、 ZeroMQ 和 MessagePack的,速度相对快,响应时间短,并发高。zerorpc 和 pyjsonrpc 一样,需要额外安装,虽然SimpleXMLRPCServer不需要额外安装,但是SimpleXMLRPCServer性能相对差一些。
pipinstall zerorpc -i https://pypi.douban.com/simple
import zerorpc
classcaculate(object):
defhello(self, name):
return'hello, {}'.format(name)
defadd(self, x, y):
returnx + y
defmultiply(self, x, y):
returnx * y
defsubtract(self, x, y):
returnabs(x-y)
defdivide(self, x, y):
returnx/y
s = zerorpc.Server(caculate)
s.bind("tcp://0.0.0.0:4242")
s.run
客户端
import zerorpc
c = zerorpc.Client
c.connect("tcp://127.0.0.1:4242")

客户端除了可以使用zerorpc框架实现代码调用之外,它还支持使用“命令行”的方式调用。
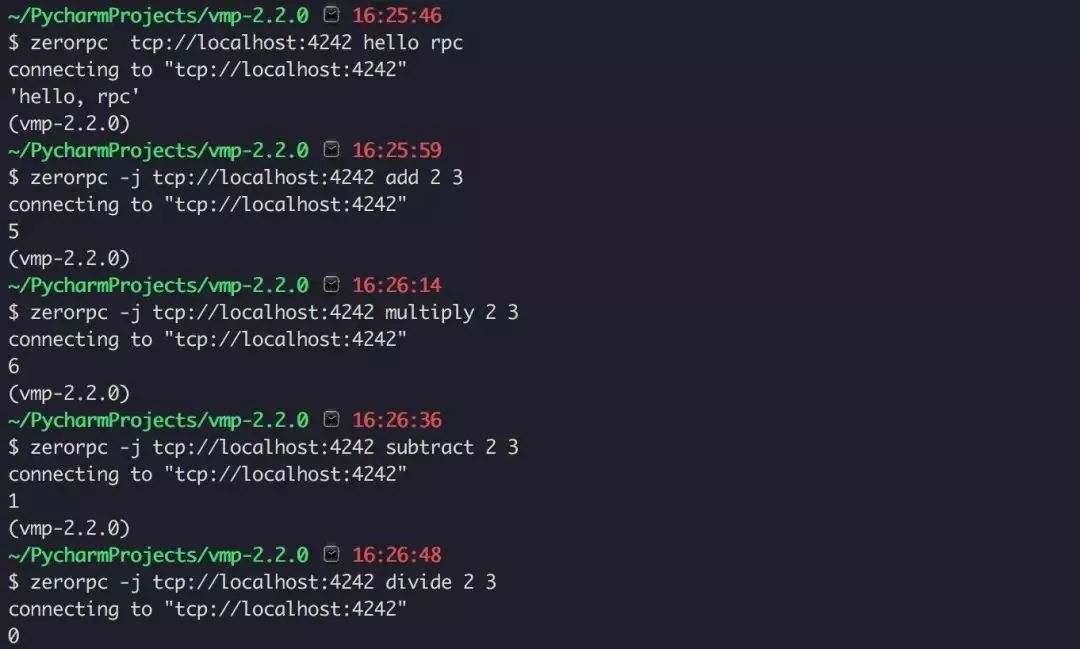
是的,通过 Github 上的文档几个 demo 可以体验到这个第三方库做真的是优秀。
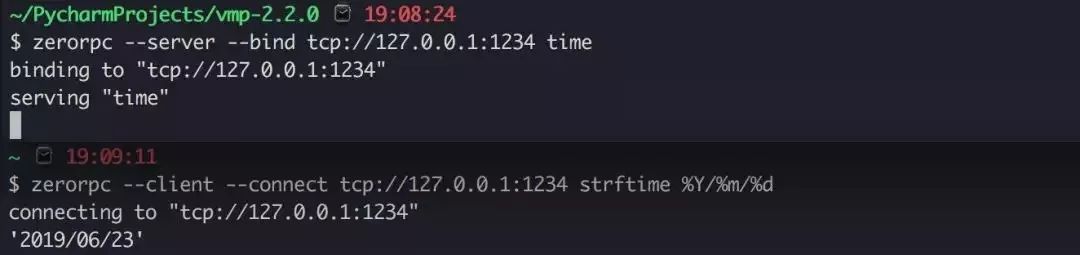
比如我们可以用下面这个命令,创建一个rpc server,后面这个 time Python 标准库中的 time 模块,zerorpc 会将 time 注册绑定以供client调用。
zerorpc--server --bind tcp://127.0.0.1:1234 time
在客户端,就可以用这条命令来远程调用这个 time 函数。
zerorpc --client --connecttcp://127.0.0.1:1234strftime %Y/%m/%d
往rpc中引入消息中间件
经过了上面的学习,我们已经学会了如何使用多种方式实现rpc远程调用。
通过对比,zerorpc 可以说是脱颖而出,一支独秀。
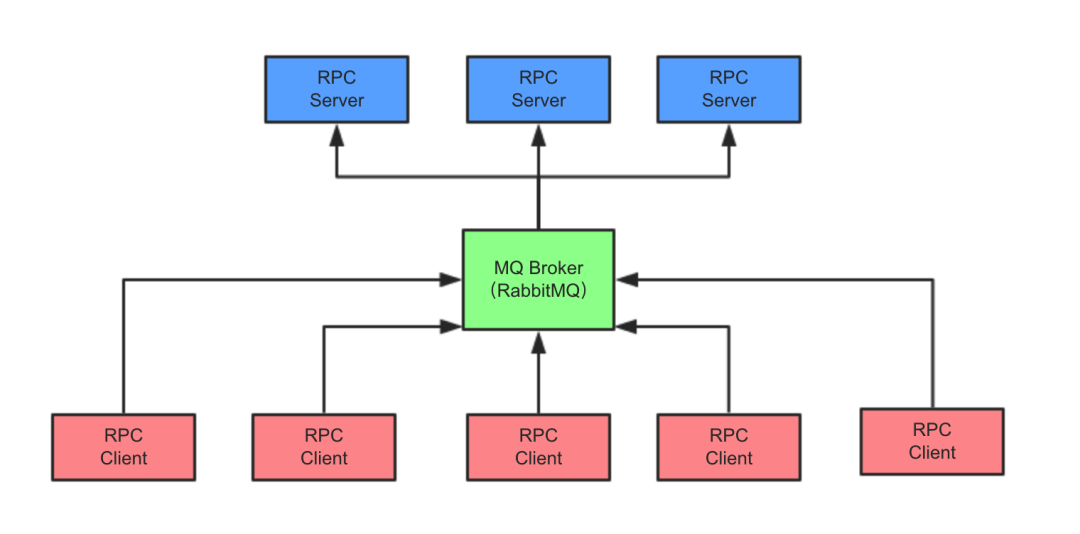
但为何在 OpenStack 中,rpc client 不直接 rpc 调用 rpc server ,而是先把 rpc 调用请求发给 RabbitMQ ,再由订阅者(rpc server)来取消息,最终实现远程调用呢?
为此,我也做了一番思考:
OpenStack 组件繁多,在一个较大的集群内部每个组件内部通过rpc通信频繁,如果都采用rpc直连调用的方式,连接数会非常地多,开销大,若有些 server 是单线程的模式,超时会非常的严重。
OpenStack 是复杂的分布式集群架构,会有多个 rpc server 同时工作,假设有 server01,server02,server03 三个server,当 rpc client 要发出rpc请求时,发给哪个好呢?这是问题一。
你可能会说轮循或者随机,这样对大家都公平。这样的话还会引出另一个问题,倘若请求刚好发到server01,而server01刚好不凑巧,可能由于机器或者其他因为导致服务没在工作,那这个rpc消息可就直接失败了呀。要知道做为一个集群,高可用是基本要求,如果出现刚刚那样的情况其实是很尴尬的。这是问题二。
集群有可能根据实际需要扩充节点数量,如果使用直接调用,耦合度太高,不利于部署和生产。这是问题三。
解决问题一:消息只有一份,接收者由AMQP的负载算法决定,默认为在所有Receiver中均匀发送(round robin)。
解决问题二:有了消息中间件做缓冲站,client 可以任性随意的发,server 都挂掉了?没有关系,等 server 正常工作后,自己来消息中间件取就行了。
解决问题三:无论有多少节点,它们只要认识消息中间件这一个中介就足够了。
既然讲到了消息队列,如果你之前没有接触过这块内容,最好花几分钟的时间跟我好好过下关于消息队列的几个基础概念。
首先,RPC只是定义了一个通信接口,其底层的实现可以各不相同,可以是 socket,也可以是今天要讲的 AMQP。
AMQP(Advanced Message Queuing Protocol)是一种基于队列的可靠消息服务协议,作为一种通信协议,AMQP同样存在多个实现,如Apache Qpid,RabbitMQ等。
以下是 AMQP 中的几个必知的概念:
Publisher:消息发布者
Receiver:消息接收者,在RabbitMQ中叫订阅者:Subscriber。
Queue:用来保存消息的存储空间,消息没有被receiver前,保存在队列中。
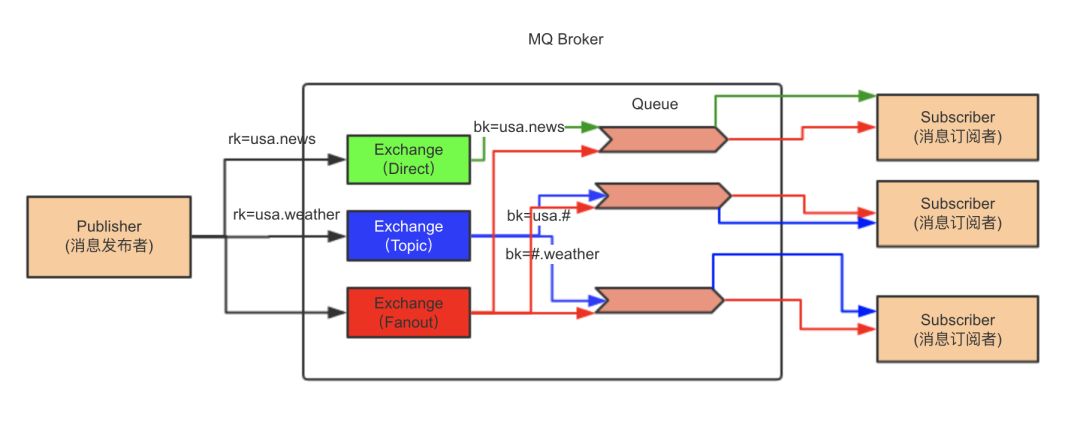
Exchange:用来接收Publisher发出的消息,根据Routing key 转发消息到对应的Message Queue中,至于转到哪个队列里,这个路由算法又由exchange type决定的。
Exchange type:主要四种描述exchange的类型。
direct:消息路由到满足此条件的队列中(queue,可以有多个):routing key = binding key
topic:消息路由到满足此条件的队列中(queue,可以有多个):routing key 匹配 binding pattern. binding pattern是类似正则表达式的字符串,可以满足复杂的路由条件。
fanout:消息路由到多有绑定到该exchange的队列中。
binding :binding是用来描述exchange和queue之间的关系的概念,一个exchang可以绑定多个队列,这些关系由binding建立。前面说的binding key /binding pattern也是在binding中给出。
为了让你明白这几者的关系,我画了一张模型图。
关于AMQP,有几下几点值得注意:
每个receiver/subscriber 在接收消息前都需要创建binding。
一个队列可以有多个receiver,队列里的一个消息只能发给一个receiver。
一个消息可以被发送到一个队列中,也可以被发送到多个多列中。多队列情况下,一个消息可以被多个receiver收到并处理。Openstack RPC中这两种情况都会用到。
生产中是如何使用RPC的?
前面铺垫了那么久,终于到了讲真实应用的场景。在生产中RPC是如何应用的呢?
其他模型我不太清楚,在 OpenStack 中的应用模型是这样的
接下来,就是源码解读 OpenStack ,看看其是如何通过rpc进行远程调用的。如若你对此没有兴趣(我知道很多人对此都没有兴趣,所以不浪费大家时间),可以直接跳过这一节,进入下一节。
目前Openstack中有两种RPC实现,一种是在oslo messaging,一种是在openstack.common.rpc。
openstack.common.rpc是旧的实现,oslo messaging是对openstack.common.rpc的重构。openstack.common.rpc在每个项目中都存在一份拷贝,oslo messaging即将这些公共代码抽取出来,形成一个新的项目。oslo messaging也对RPC API 进行了重新设计,对多种 transport 做了进一步封装,底层也是用到了kombu这个AMQP库。(注:Kombu 是Python中的messaging库。Kombu旨在通过为AMQ协议提供惯用的高级接口,使Python中的消息传递尽可能简单,并为常见的消息传递问题提供经过验证和测试的解决方案。)
关于oslo_messaging库,主要提供了两种独立的API:
oslo.messaging.rpc(实现了客户端-服务器远程过程调用)
oslo.messaging.notify(实现了事件的通知机制)
因为 notify 实现是太简单了,所以这里我就不多说了,如果有人想要看这方面内容,可以收藏我的博客(http://python-online.cn) ,我会更新补充 notify 的内容。
OpenStack RPC 模块提供了 rpc.call,rpc.cast, rpc.fanout_cast 三种 RPC 调用方法,发送和接收 RPC 请求。
rpc.call 发送 RPC 同步请求并返回请求处理结果。
rpc.cast 发送 RPC 异步请求,与 rpc.call 不同之处在于,不需要请求处理结果的返回。
rpc.call 和 .rpc.cast 从实现代码上看,他们的区别很小,就是call调用时候会带有wait_for_reply=True参数,而cast不带。
要了解 rpc 的调用机制呢,首先要知道 oslo_messaging 的几个概念主要方法有四个:
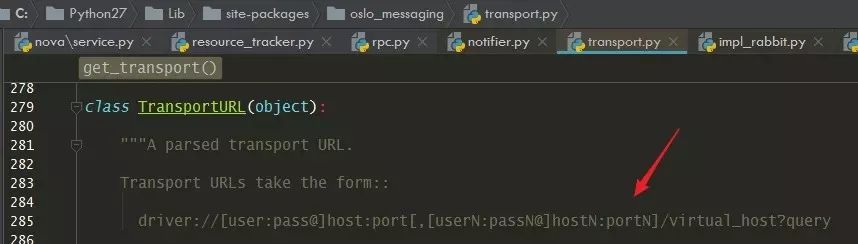
transport:RPC功能的底层实现方法,这里是rabbitmq的消息队列的访问路径
transport 就是定义你如何访连接消息中间件,比如你使用的是 Rabbitmq,那在 nova.conf中应该有一行transport_url的配置,可以很清楚地看出指定了 rabbitmq 为消息中间件,并配置了连接rabbitmq的user,passwd,主机,端口。
transport_url=rabbit://user:passwd@host:5672
defget_transport(conf, url=None, allowed_remote_exmods=None):
return_get_transport(conf, url, allowed_remote_exmods,
transport_cls=RPCTransport)
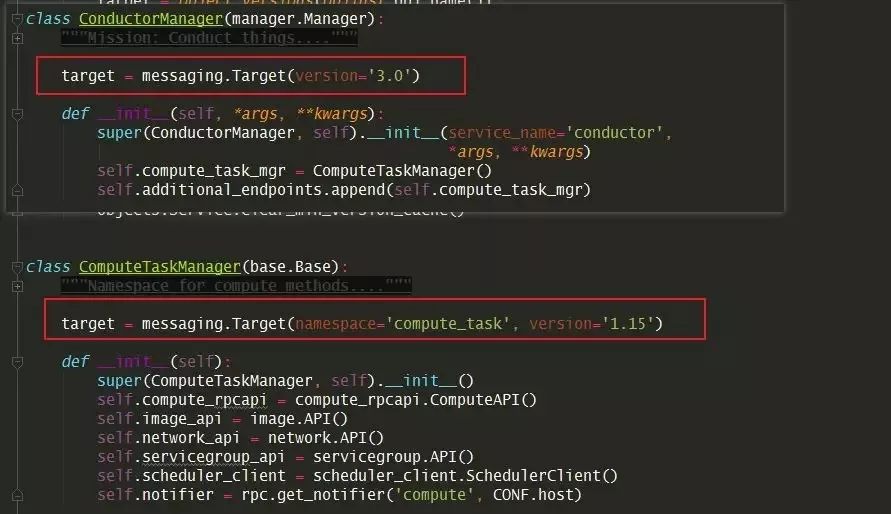
target:指定RPC topic交换机的匹配信息和绑定主机。
target用来表述 RPC 服务器监听topic,server名称和server监听的exchange,是否广播fanout。
classTarget(object):
def__init__(self, exchange=None, topic=None, namespace=None,
version=None, server=None, fanout=None,
legacy_namespaces=None):
self.exchange = exchange
self.topic = topic
self.namespace = namespace
self.version = version
self.server = server
self.fanout = fanout
self.accepted_namespaces = [namespace] + (legacy_namespaces or[])
rpc server 要获取消息,需要定义target,就像一个门牌号一样。
rpc client 要发送消息,也需要有target,说明消息要发到哪去。
endpoints:是可供别人远程调用的对象
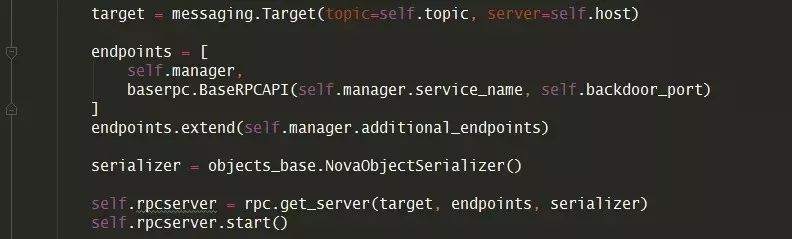
RPC服务器暴露出endpoint,每个 endpoint 包涵一系列的可被远程客户端通过 transport 调用的方法。直观理解,可以参考nova-conductor创建rpc server的代码,这边的endpoints就是 nova/manager.py:ConductorManager
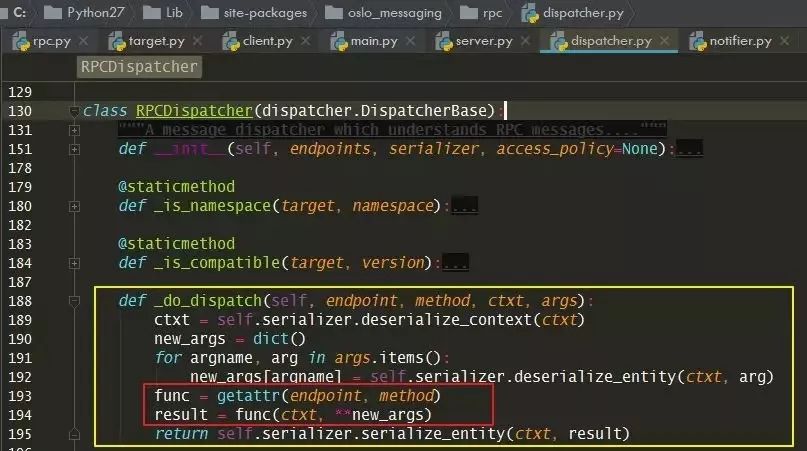
dispatcher:分发器,这是 rpc server 才有的概念

只有通过它 server 端才知道接收到的rpc请求,要交给谁处理,怎么处理?
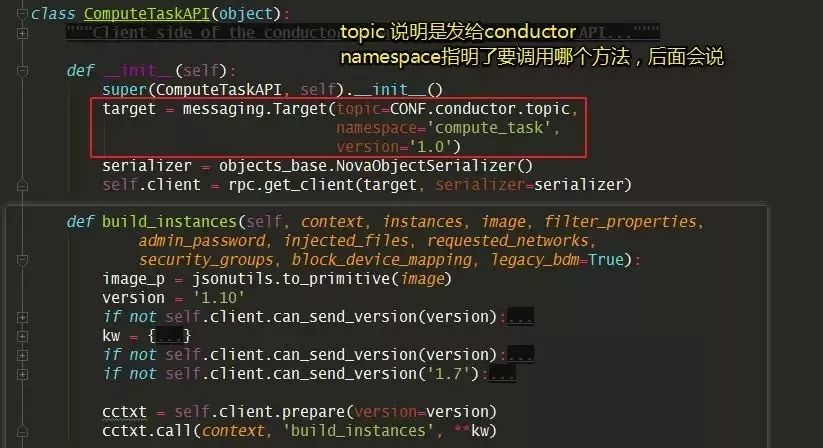
在client端,是这样指定要调用哪个方法的。
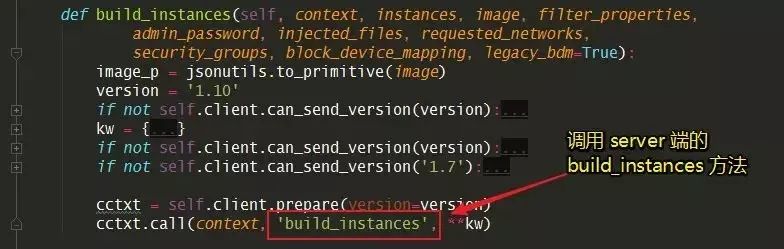
而在server端,是如何知道要执行这个方法的呢?这就是dispatcher 要干的事,它从 endpoint 里找到这个方法,然后执行,最后返回。
Serializer:在 python 对象和message(notification) 之间数据做序列化或是反序列化的基类。
1.deserialize_context(ctxt) :对字典变成 request contenxt.
2.deserialize_entity(ctxt, entity) :对entity做反序列化,其中ctxt是已经deserialize过的,entity是要处理的。
3.serialize_context(ctxt) :将Request context变成字典类型
4.serialize_entity(ctxt, entity) :对entity做序列化,其中ctxt是已经deserialize过的,entity是要处理的。
executor:服务的运行方式,单线程或者多线程
每个notification listener都和一个executor绑定,来控制收到的notification如何分配。默认情况下,使用的是blocking executor(具体特性参加executor一节)
oslo_messaging.get_notification_listener(transport, targets, endpoints, executor=’blocking’, serializer=None, allow_requeue=False, pool=None)
rpc server 和rpc client 的四个重要方法
reset:Reset service.
start:该方法调用后,server开始poll,从transport中接收message,然后转发给dispatcher.该message处理过程一直进行,直到stop方法被调用。executor决定server的IO处理策略。可能会是用一个新进程、新协程来做poll操作,或是直接简单的在一个循环中注册一个回调。同样,executor也决定分配message的方式,是在一个新线程中dispatch或是…..
stop:当调用stop之后,新的message不会被处理。但是,server可能还在处理一些之前没有处理完的message,并且底层driver资源也还一直没有释放。
wait:在stop调用之后,可能还有message正在被处理,使用wait方法来阻塞当前进程,直到所有的message都处理完成。之后,底层的driver资源会释放。
模仿OpenStack写 rpc 调用
模仿是一种很高效的学习方法,我这里根据 OpenStack 的调用方式,抽取出核心内容,写成一个简单的 demo,有对 OpenStack 感兴趣的可以了解一下,大部分人也可以直接跳过这章节。
注意以下代码不能直接运行,你还需要配置 rabbitmq 的连接方式,你可以写在配置文件中,通过 get_transport 从cfg.CONF 中读取,也可以直接将其写成url的格式做成参数,传给 get_transport 。而且还要nova或者其他openstack组件的环境中运行(因为需要有ctxt这个环境变量)
简单的 rpc client
#coding=utf-8
importoslo_messaging
fromoslo_config importcfg
# 创建 rpc client
transport = oslo_messaging.get_transport(cfg.CONF, url="")
target = oslo_messaging.Target(topic='test', version='2.0')
client = oslo_messaging.RPCClient(transport, target)
# rpc同步调用
client.call(ctxt, 'test', arg=arg)
简单的 rpc server
#coding=utf-8
fromoslo_config importcfg
importoslo_messaging
importtime
# 定义endpoint类
classServerControlEndpoint(object):
target = oslo_messaging.Target(namespace='control',
version='2.0')
def__init__(self, server):
self.server = server
defstop(self, ctx):
ifself.server:
self.server.stop
classTestEndpoint(object):
deftest(self, ctx, arg):
returnarg
# 创建rpc server
transport = oslo_messaging.get_transport(cfg.CONF, url="")
target = oslo_messaging.Target(topic='test', server='server1')
endpoints = [
ServerControlEndpoint(None),
TestEndpoint,
]
server = oslo_messaging.get_rpc_server(transport, target,endpoints,executor='blocking')
try:
server.start
whileTrue:
time.sleep(1)
exceptKeyboardInterrupt:
print("Stopping server")
server.stop
server.wait
责任编辑:

