
- 1视频监控平台 liveweb国标gb28181视频融合监控汇聚云平台的方案实现及场景应用_liveweb下载
- 2解决问题:RuntimeError: CUDA out of memory. Tried to allocate 20.00 MiB
- 3java 工具类Base64工具_java base64util
- 4个人拥有云服务器能做什么?近20种主要用途介绍_云服务器能干什么
- 5windows下安装Docker,点击docker desktop后一直转圈圈,提示:docker is starting_docker desktop一直转圈
- 6Python面试题整理-牛客网_关于python内存管理错误的说法
- 7史上最详细的Windows10系统离线安装.NET Framework 3.5的方法(附离线安装包下载)_net framework 3.5离线安装
- 8Mysql的redolog和binlog_redlog
- 9Android Studio 最新版本首次下载和安装以及汉化教程【+第二次安装使用教程】_android studio下载
- 10css 实现丰富的序号效果_css 序号样式
GPU 多卡并行训练总结(以 pytorch 为例)_train_one_epoch
赞
踩
01 为什么要使用多GPU并行训练
简单来说,有两种原因:第一种是模型在一块GPU上放不下,两块或多块GPU上就能运行完整的模型(如早期的AlexNet)。第二种是多块GPU并行计算可以达到加速训练的效果。想要成为“炼丹大师“,多GPU并行训练是不可或缺的技能。
02 常见的多GPU训练方法
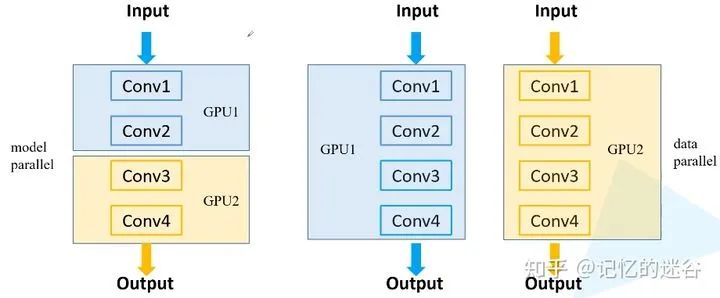
1.模型并行方式:如果模型特别大,GPU显存不够,无法将一个显存放在GPU上,需要把网络的不同模块放在不同GPU上,这样可以训练比较大的网络。(下图左半部分)
2.数据并行方式:将整个模型放在一块GPU里,再复制到每一块GPU上,同时进行正向传播和反向误差传播。相当于加大了batch_size。(下图右半部分)
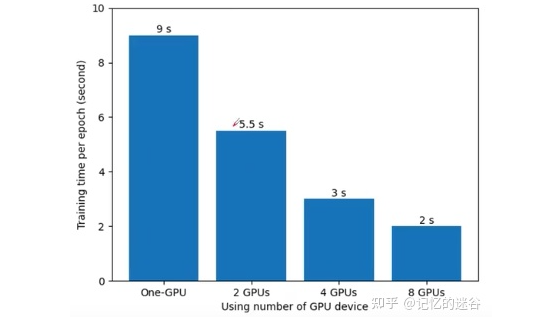
在pytorch1.7 + cuda10 + TeslaV100的环境下,使用ResNet34,batch_size=16, SGD对花草数据集训练的情况如下:使用一块GPU需要9s一个epoch,使用两块GPU是5.5s, 8块是2s。这里有一个问题,为什么运行时间不是9/8≈1.1s ? 因为使用GPU数量越多,设备之间的通讯会越来越复杂,所以随着GPU数量的增加,训练速度的提升也是递减的。
03 误差梯度如何在不同设备之间通信?
在每个GPU训练step结束后,将每块GPU的损失梯度求平均,而不是每块GPU各计算各的。
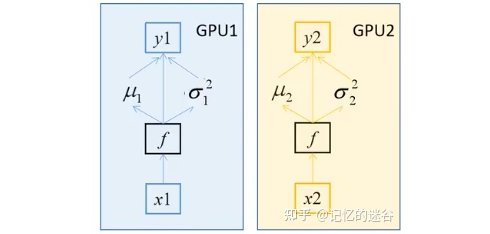
04 BN如何在不同设备之间同步?
假设batch_size=2,每个GPU计算的均值和方差都针对这两个样本而言的。而BN的特性是:batch_size越大,均值和方差越接近与整个数据集的均值和方差,效果越好。使用多块GPU时,会计算每个BN层在所有设备上输入的均值和方差。如果GPU1和GPU2都分别得到两个特征层,那么两块GPU一共计算4个特征层的均值和方差,可以认为batch_size=4。注意:如果不用同步BN,而是每个设备计算自己的批次数据的均值方差,效果与单GPU一致,仅仅能提升训练速度;如果使用同步BN,效果会有一定提升,但是会损失一部分并行速度。
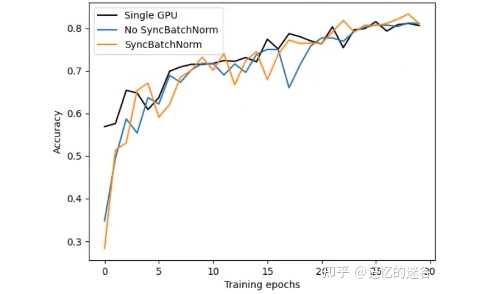
下图为单GPU、以及是否使用同步BN训练的三种情况,可以看到使用同步BN(橙线)比不使用同步BN(蓝线)总体效果要好一些,不过训练时间也会更长。使用单GPU(黑线)和不使用同步BN的效果是差不多的。
05 两种GPU训练方法:DataParallel和DistributedDataParallel
DataParallel是单进程多线程的,仅仅能工作在单机中。而DistributedDataParallel是多进程的,可以工作在单机或多机器中。
DataParallel通常会慢于DistributedDataParallel。所以目前主流的方法是DistributedDataParallel。
06 pytorch中常见的GPU启动方式

注:distributed.launch方法如果开始训练后,手动终止程序,最好先看下显存占用情况,有小概率进程没kill的情况,会占用一部分GPU显存资源。
下面以分类问题为基准,详细介绍使用DistributedDataParallel时的过程:
首先要初始化各进程环境:
def init_distributed_mode(args): # 如果是多机多卡的机器,WORLD_SIZE代表使用的机器数,RANK对应第几台机器 # 如果是单机多卡的机器,WORLD_SIZE代表有几块GPU,RANK和LOCAL_RANK代表第几块GPU if 'RANK' in os.environ and 'WORLD_SIZE' in os.environ: args.rank = int(os.environ["RANK"]) args.world_size = int(os.environ['WORLD_SIZE']) # LOCAL_RANK代表某个机器上第几块GPU args.gpu = int(os.environ['LOCAL_RANK']) elif 'SLURM_PROCID' in os.environ: args.rank = int(os.environ['SLURM_PROCID']) args.gpu = args.rank % torch.cuda.device_count() else: print('Not using distributed mode') args.distributed = False returnargs.distributed = Truetorch.cuda.set_device(args.gpu) # 对当前进程指定使用的GPU args.dist_backend = 'nccl' # 通信后端,nvidia GPU推荐使用NCCL dist.barrier() # 等待每个GPU都运行完这个地方以后再继续
在main函数初始阶段,进行以下初始化操作。需要注意的是,学习率需要根据使用GPU的张数增加。在这里使用简单的倍增方法。
def main(args): if torch.cuda.is_available() is False: raise EnvironmentError("not find GPU device for training.")# 初始化各进程环境 init_distributed_mode(args=args)rank = args.rank device = torch.device(args.device) batch_size = args.batch_size num_classes = args.num_classes weights_path = args.weights args.lr *= args.world_size # 学习率要根据并行GPU的数倍增
实例化数据集可以使用单卡相同的方法,但在sample样本时,和单机不同,需要使用DistributedSampler和BatchSampler。
#给每个rank对应的进程分配训练的样本索引train_sampler=torch.utils.data.distributed.DistributedSampler(train_data_set)val_sampler=torch.utils.data.distributed.DistributedSampler(val_data_set)#将样本索引每batch_size个元素组成一个listtrain_batch_sampler=torch.utils.data.BatchSampler(train_sampler,batch_size,drop_last=True)
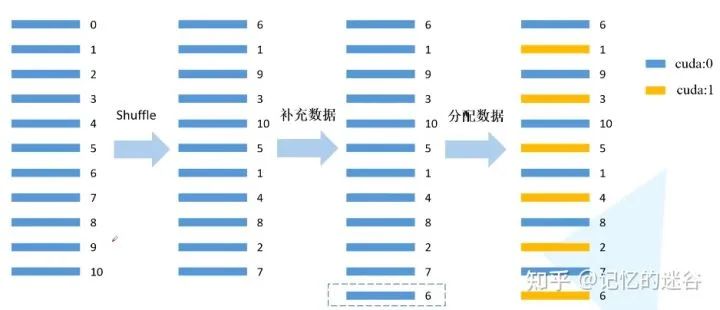
DistributedSampler原理如图所示:假设当前数据集有0~10共11个样本,使用2块GPU计算。首先打乱数据顺序,然后用 11/2 =6(向上取整),然后6乘以GPU个数2 = 12,因为只有11个数据,所以再把第一个数据(索引为6的数据)补到末尾,现在就有12个数据可以均匀分到每块GPU。然后分配数据:间隔将数据分配到不同的GPU中。
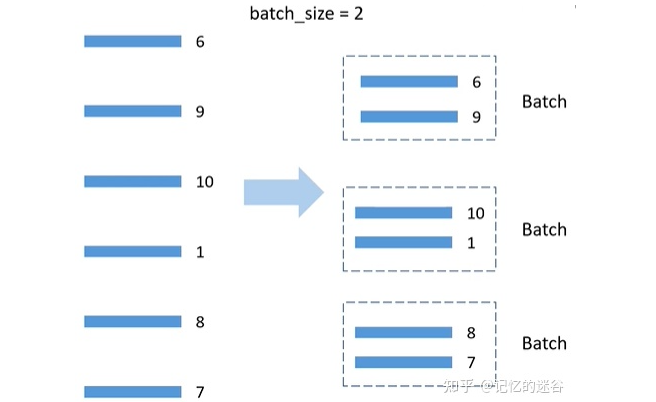
BatchSampler原理: DistributedSmpler将数据分配到两个GPU上,以第一个GPU为例,分到的数据是6,9,10,1,8,7,假设batch_size=2,就按顺序把数据两两一组,在训练时,每次获取一个batch的数据,就从组织好的一个个batch中取到。注意:只对训练集处理,验证集不使用BatchSampler。
接下来使用定义好的数据集和sampler方法加载数据:
train_loader = torch.utils.data.DataLoader(train_data_set, batch_sampler=train_batch_sampler, pin_memory=True, # 直接加载到显存中,达到加速效果 num_workers=nw, collate_fn=train_data_set.collate_fn)val_loader = torch.utils.data.DataLoader(val_data_set, batch_size=batch_size, sampler=val_sampler, pin_memory=True, num_workers=nw, collate_fn=val_data_set.collate_fn)
如果有预训练权重的话,需要保证每块GPU加载的权重是一模一样的。需要在主进程保存模型初始化权重,在不同设备上载入主进程保存的权重。这样才能保证每块GOU上加载的权重是一致的:
# 实例化模型 model = resnet34(num_classes=num_classes).to(device)# 如果存在预训练权重则载入 if os.path.exists(weights_path): weights_dict = torch.load(weights_path, map_location=device) # 简单对比每层的权重参数个数是否一致 load_weights_dict = {k: v for k, v in weights_dict.items() if model.state_dict()[k].numel() == v.numel()} model.load_state_dict(load_weights_dict, strict=False) else: checkpoint_path = os.path.join(tempfile.gettempdir(), "initial_weights.pt") # 如果不存在预训练权重,需要将第一个进程中的权重保存,然后其他进程载入,保持初始化权重一致 if rank == 0: torch.save(model.state_dict(), checkpoint_path)dist.barrier() # 这里注意,一定要指定map_location参数,否则会导致第一块GPU占用更多资源 model.load_state_dict(torch.load(checkpoint_path, map_location=device))
如果需要冻结模型权重,和单GPU基本没有差别。如果不需要冻结权重,可以选择是否同步BN层。然后再把模型包装成DDP模型,就可以方便进程之间的通信了。多GPU和单GPU的优化器设置没有差别,这里不再赘述。
# 是否冻结权重 if args.freeze_layers: for name, para in model.named_parameters(): # 除最后的全连接层外,其他权重全部冻结 if "fc" not in name: para.requires_grad_(False) else: # 只有训练带有BN结构的网络时使用SyncBatchNorm采用意义 if args.syncBN: # 使用SyncBatchNorm后训练会更耗时 model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)# 转为DDP模型 model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.gpu])# optimizer使用SGD+余弦淬火策略 pg = [p for p in model.parameters() if p.requires_grad] optimizer = optim.SGD(pg, lr=args.lr, momentum=0.9, weight_decay=0.005) lf = lambda x: ((1 + math.cos(x * math.pi / args.epochs)) / 2) * (1 - args.lrf) + args.lrf # cosine scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
与单GPU不同的地方:rain_sampler.set_epoch(epoch),这行代码会在每次迭代的时候获得一个不同的生成器,每一轮开始迭代获取数据之前设置随机种子,通过改变传进的epoch参数改变打乱数据顺序。通过设置不同的随机种子,可以让不同GPU每轮拿到的数据不同。后面的部分和单GPU相同。
for epoch in range(args.epochs): train_sampler.set_epoch(epoch) mean_loss = train_one_epoch(model=model, optimizer=optimizer, data_loader=train_loader, device=device, epoch=epoch)scheduler.step()sum_num = evaluate(model=model, data_loader=val_loader, device=device) acc = sum_num / val_sampler.total_size
我们详细看看每个epoch是训练时和单GPU训练的差异(上面的train_one_epoch)
def train_one_epoch(model, optimizer, data_loader, device, epoch): model.train() loss_function = torch.nn.CrossEntropyLoss() mean_loss = torch.zeros(1).to(device) optimizer.zero_grad()# 在进程0中打印训练进度 if is_main_process(): data_loader = tqdm(data_loader)for step, data in enumerate(data_loader): images, labels = datapred = model(images.to(device))loss = loss_function(pred, labels.to(device)) loss.backward() loss = reduce_value(loss, average=True) # 在单GPU中不起作用,多GPU时,获得所有GPU的loss的均值。 mean_loss = (mean_loss * step + loss.detach()) / (step + 1) # update mean losses# 在进程0中打印平均loss if is_main_process(): data_loader.desc = "[epoch {}] mean loss {}".format(epoch, round(mean_loss.item(), 3))if not torch.isfinite(loss): print('WARNING: non-finite loss, ending training ', loss) sys.exit(1)optimizer.step() optimizer.zero_grad()# 等待所有进程计算完毕 if device != torch.device("cpu"): torch.cuda.synchronize(device)return mean_loss.item()def reduce_value(value, average=True): world_size = get_world_size() if world_size < 2: # 单GPU的情况 return valuewith torch.no_grad(): dist.all_reduce(value) # 对不同设备之间的value求和 if average: # 如果需要求平均,获得多块GPU计算loss的均值 value /= world_sizereturn value
接下来看一下验证阶段的情况,和单GPU最大的额不同之处是预测正确样本个数的地方。
@torch.no_grad() def evaluate(model, data_loader, device): model.eval()# 用于存储预测正确的样本个数,每块GPU都会计算自己正确样本的数量 sum_num = torch.zeros(1).to(device)# 在进程0中打印验证进度 if is_main_process(): data_loader = tqdm(data_loader)for step, data in enumerate(data_loader): images, labels = data pred = model(images.to(device)) pred = torch.max(pred, dim=1)[1] sum_num += torch.eq(pred, labels.to(device)).sum()# 等待所有进程计算完毕 if device != torch.device("cpu"): torch.cuda.synchronize(device)sum_num = reduce_value(sum_num, average=False) # 预测正确样本个数return sum_num.item()
需要注意的是:保存模型的权重需要在主进程中进行保存。
if rank == 0: print("[epoch {}] accuracy: {}".format(epoch, round(acc, 3))) tags = ["loss", "accuracy", "learning_rate"] tb_writer.add_scalar(tags[0], mean_loss, epoch) tb_writer.add_scalar(tags[1], acc, epoch) tb_writer.add_scalar(tags[2], optimizer.param_groups[0]["lr"], epoch)torch.save(model.module.state_dict(), "./weights/model-{}.pth".format(epoch))
如果从头开始训练,主进程生成的初始化权重是以临时文件的形式保存,需要训练完后移除掉。最后还需要撤销进程组。
if rank == 0:# 删除临时缓存文件 if os.path.exists(checkpoint_path) is True: os.remove(checkpoint_path) dist.destroy_process_group() # 撤销进程组,释放资源link

